Das könnte Ihnen auch gefallen
- Eye Directive Wheelchair SeminarDokument18 SeitenEye Directive Wheelchair SeminarSagar walanjNoch keine Bewertungen
- Paper22304 2307Dokument4 SeitenPaper22304 2307AjeeshNoch keine Bewertungen
- EYE DIRECTIVE WHEEL CHAIR MaheshDokument15 SeitenEYE DIRECTIVE WHEEL CHAIR MaheshMahesh75% (4)
- Sensor Based Eye Controlled Automated Wheelchair: Shreyasi Samanta and Mrs. R DayanaDokument4 SeitenSensor Based Eye Controlled Automated Wheelchair: Shreyasi Samanta and Mrs. R DayanaSwapna GanigaNoch keine Bewertungen
- EYEDIRECTIVEDokument15 SeitenEYEDIRECTIVErajigaddam 999Noch keine Bewertungen
- Introduction To Accelerometer Controlled Wheel ChairDokument26 SeitenIntroduction To Accelerometer Controlled Wheel Chairpradeep100% (1)
- Shen Li Final Paper PDFDokument7 SeitenShen Li Final Paper PDFShen LiNoch keine Bewertungen
- Automatic Wheel ChairDokument4 SeitenAutomatic Wheel Chairsuraj dhulannavarNoch keine Bewertungen
- Ic3i 2016 7917927Dokument4 SeitenIc3i 2016 7917927Jaswanth JeshuNoch keine Bewertungen
- Embewc PPTDokument31 SeitenEmbewc PPTAbhishek AryanNoch keine Bewertungen
- Accelerometer Based Hand Gesture Controlled Wheelchair: Paridhi Gupta, Prachi Sharma, Rahul Kr. Singh & Sneha YadavDokument6 SeitenAccelerometer Based Hand Gesture Controlled Wheelchair: Paridhi Gupta, Prachi Sharma, Rahul Kr. Singh & Sneha Yadavahmed mediaNoch keine Bewertungen
- Wheelchair Controlled by Speech and VisionDokument6 SeitenWheelchair Controlled by Speech and VisionIJRASETPublicationsNoch keine Bewertungen
- ABSTRACTDokument16 SeitenABSTRACTMrinalsheNoch keine Bewertungen
- Smart Wheelchair Using Android Smartphone For Physically Disabled PeopleDokument5 SeitenSmart Wheelchair Using Android Smartphone For Physically Disabled Peoplegar gorNoch keine Bewertungen
- Preliminary Investigation of A Semi-Autonomous Robotic Wheelchair Directed Through ElectrodesDokument3 SeitenPreliminary Investigation of A Semi-Autonomous Robotic Wheelchair Directed Through ElectrodesAnna ArroyoNoch keine Bewertungen
- Smart Chair SystemDokument10 SeitenSmart Chair SystemyashNoch keine Bewertungen
- Voice Controlled Wheel ChairDokument96 SeitenVoice Controlled Wheel ChairbhavanaNoch keine Bewertungen
- 08-06-2021-1623150985-6-Ijece-3. Ijece - Foc Jun 2021 - Novel Wheel Chair For Physically Challenged Using IotDokument10 Seiten08-06-2021-1623150985-6-Ijece-3. Ijece - Foc Jun 2021 - Novel Wheel Chair For Physically Challenged Using Iotiaset123Noch keine Bewertungen
- Eye Directive Wheelchair@Fnl-1Dokument21 SeitenEye Directive Wheelchair@Fnl-1Swaraj Kumar SwainNoch keine Bewertungen
- Wheelchair AbstractDokument7 SeitenWheelchair AbstractChirag VadgamaNoch keine Bewertungen
- Reference Paper 2Dokument6 SeitenReference Paper 2Adithya ChakilamNoch keine Bewertungen
- Infrared Non-Contact Head Sensor, For Control of Wheelchair MovementsDokument5 SeitenInfrared Non-Contact Head Sensor, For Control of Wheelchair MovementsJainul PatelNoch keine Bewertungen
- Shortened PointsDokument4 SeitenShortened PointsREDWAN AHMED MIAZEENoch keine Bewertungen
- Construction and Design of A Camera Stabilizer Based On A Gyroscope and Accelerometer SensorDokument7 SeitenConstruction and Design of A Camera Stabilizer Based On A Gyroscope and Accelerometer SensorAyub Anwar M-SalihNoch keine Bewertungen
- Irjet V7i5640Dokument5 SeitenIrjet V7i5640Bhuvana NNoch keine Bewertungen
- Iot Operated Wheel Chair: Mr. Abhishek P V, Mr. Manjunatha H G, Mr. Sudarshan P B, Mr. Varun Reddy K PDokument3 SeitenIot Operated Wheel Chair: Mr. Abhishek P V, Mr. Manjunatha H G, Mr. Sudarshan P B, Mr. Varun Reddy K PAhmed ShoeebNoch keine Bewertungen
- Hand Gesture Based Wheel HairDokument5 SeitenHand Gesture Based Wheel HairKaran Keher0% (1)
- DJ StrikeDokument12 SeitenDJ StrikeAyush ToliaNoch keine Bewertungen
- Vision Controlled Motorised WheelchairDokument13 SeitenVision Controlled Motorised WheelchairIJRASETPublicationsNoch keine Bewertungen
- Smart and Safe WheelchairDokument5 SeitenSmart and Safe WheelchairAakash SheelvantNoch keine Bewertungen
- Automatic Wheelchair 4473Dokument3 SeitenAutomatic Wheelchair 4473Tina GuptaNoch keine Bewertungen
- 61 67Dokument7 Seiten61 67VijayNoch keine Bewertungen
- A Prototype of Electric Wheelchair Controlled by Eye-Only For Paralyzed UserDokument2 SeitenA Prototype of Electric Wheelchair Controlled by Eye-Only For Paralyzed UserQazi KamalNoch keine Bewertungen
- Wheelchair Obstacle Avoidance Based On FuzzyDokument3 SeitenWheelchair Obstacle Avoidance Based On FuzzyVijay KumarNoch keine Bewertungen
- Wheelchair Control by Head Motion: Aleksandar Pajkanović, Branko DokićDokument17 SeitenWheelchair Control by Head Motion: Aleksandar Pajkanović, Branko DokićHamed RazaNoch keine Bewertungen
- Abstract: in Today's World, It Is Very Difficult To Survive For All Those Who AreDokument14 SeitenAbstract: in Today's World, It Is Very Difficult To Survive For All Those Who AreAkash BamanalliNoch keine Bewertungen
- Eye Controlled Wheelchair Based On Arduino Circuit: Reona Cerejo, Valentine Correia, Neil PereiraDokument5 SeitenEye Controlled Wheelchair Based On Arduino Circuit: Reona Cerejo, Valentine Correia, Neil PereiratahaseenNoch keine Bewertungen
- Smart Electronic Wheelchair: St. Aloysius Institute of Technology Jabalpur, Madhya PradeshDokument4 SeitenSmart Electronic Wheelchair: St. Aloysius Institute of Technology Jabalpur, Madhya Pradeshking girmaNoch keine Bewertungen
- Smart Zebra CrossingDokument3 SeitenSmart Zebra CrossingInternational Journal of Innovative Science and Research Technology100% (2)
- Project Report 1Dokument26 SeitenProject Report 1Safalsha BabuNoch keine Bewertungen
- SSRN Id3643595Dokument3 SeitenSSRN Id3643595Ec Alwin jollyNoch keine Bewertungen
- Automated Wheelchair Controller System Using IoT-IJRASETDokument14 SeitenAutomated Wheelchair Controller System Using IoT-IJRASETIJRASETPublicationsNoch keine Bewertungen
- Obstacle Aviodance Robot Using Arduino: P.Iswarya D.Ramarao B.Dileep Kumar K.Dileep Kumar T.ManikyalaraoDokument5 SeitenObstacle Aviodance Robot Using Arduino: P.Iswarya D.Ramarao B.Dileep Kumar K.Dileep Kumar T.ManikyalaraoRichard Kaven SerquinaNoch keine Bewertungen
- Automatic Vehicle Control Using Sensors: ISSN: 2278 - 0211 (Online)Dokument7 SeitenAutomatic Vehicle Control Using Sensors: ISSN: 2278 - 0211 (Online)Sandhya NatarajanNoch keine Bewertungen
- Design and Implementation of An Intelligent Voice Controlled Wheel ChairDokument10 SeitenDesign and Implementation of An Intelligent Voice Controlled Wheel ChairKIU PUBLICATION AND EXTENSIONNoch keine Bewertungen
- Design and Implementation of An Intelligent Voice Controlled Wheel ChairDokument10 SeitenDesign and Implementation of An Intelligent Voice Controlled Wheel ChairKampala International UniversityNoch keine Bewertungen
- 49 (Page 485-500)Dokument16 Seiten49 (Page 485-500)Yassine RabhiNoch keine Bewertungen
- Accelerometer-Based Gesture-Based Wheelchair ControlDokument5 SeitenAccelerometer-Based Gesture-Based Wheelchair ControlIJRASETPublicationsNoch keine Bewertungen
- Brain Controlled Car For DisabledDokument8 SeitenBrain Controlled Car For Disabledsrkbatch08Noch keine Bewertungen
- Hand Gesture Control Wheel Chair Using Mems AccelerometerDokument1 SeiteHand Gesture Control Wheel Chair Using Mems AccelerometerDamodara MadhukarNoch keine Bewertungen
- Adxl 345 Controlled Wheel ChairDokument24 SeitenAdxl 345 Controlled Wheel Chairjuber mullaNoch keine Bewertungen
- Automatic Wheelchair With Essential ApplicationsDokument6 SeitenAutomatic Wheelchair With Essential ApplicationsIJSTENoch keine Bewertungen
- Automated Gesture Based Wireless Wheelchair Control by Means of AccelerometerDokument5 SeitenAutomated Gesture Based Wireless Wheelchair Control by Means of AccelerometerAKHILNoch keine Bewertungen
- Voice and Touch Screen Based Direction and Speed Control of Wheel Chair For Physically Challenged Using ArduinoDokument3 SeitenVoice and Touch Screen Based Direction and Speed Control of Wheel Chair For Physically Challenged Using ArduinoseventhsensegroupNoch keine Bewertungen
- Tongue Motion Controlled WheelchairDokument6 SeitenTongue Motion Controlled Wheelchairhichem sabiNoch keine Bewertungen
- Synopsis Hand Gesture RecognitionDokument4 SeitenSynopsis Hand Gesture RecognitionSARTHAK SINGHNoch keine Bewertungen
- Performance Analysis of Voice Operated Wheel ChairDokument5 SeitenPerformance Analysis of Voice Operated Wheel ChairInternational Journal of Research in Engineering and TechnologyNoch keine Bewertungen
- Obstacle Aviodance Robot Using Arduino: P.Iswarya D.Ramarao B.Dileep Kumar K.Dileep Kumar T.ManikyalaraoDokument7 SeitenObstacle Aviodance Robot Using Arduino: P.Iswarya D.Ramarao B.Dileep Kumar K.Dileep Kumar T.ManikyalaraoPramod TNoch keine Bewertungen
- Brain Controlled Car For DisabledDokument7 SeitenBrain Controlled Car For DisabledArjun AnduriNoch keine Bewertungen
- Introduction To Thermodynamics: Department of Mechanical EngineeringDokument16 SeitenIntroduction To Thermodynamics: Department of Mechanical EngineeringRamaswamy SubbiahNoch keine Bewertungen
- Fas JanDokument82 SeitenFas JanRamaswamy SubbiahNoch keine Bewertungen
- SM Model QuestionDokument2 SeitenSM Model QuestionRamaswamy SubbiahNoch keine Bewertungen
- Fas FEBDokument82 SeitenFas FEBRamaswamy SubbiahNoch keine Bewertungen
- Force Analysis: Department of Mechanical EngineeringDokument48 SeitenForce Analysis: Department of Mechanical EngineeringRamaswamy SubbiahNoch keine Bewertungen
- VALANDokument1 SeiteVALANRamaswamy SubbiahNoch keine Bewertungen
- Dom MCQ QuestionDokument5 SeitenDom MCQ QuestionRamaswamy SubbiahNoch keine Bewertungen
- Dyna Att Final 1Dokument16 SeitenDyna Att Final 1Ramaswamy SubbiahNoch keine Bewertungen
- DJF Unit Ii PDFDokument66 SeitenDJF Unit Ii PDFRamaswamy SubbiahNoch keine Bewertungen
- ST - Mother Theresa Engineering College: S.No Reg No Name Marks (70) MarksDokument4 SeitenST - Mother Theresa Engineering College: S.No Reg No Name Marks (70) MarksRamaswamy SubbiahNoch keine Bewertungen
- Dyna Att Final 1Dokument16 SeitenDyna Att Final 1Ramaswamy SubbiahNoch keine Bewertungen
- Agem 2 MarksDokument3 SeitenAgem 2 MarksRamaswamy SubbiahNoch keine Bewertungen
- DJF Unit Ii PDFDokument66 SeitenDJF Unit Ii PDFRamaswamy SubbiahNoch keine Bewertungen
- Dom MCQ QuestionDokument5 SeitenDom MCQ QuestionRamaswamy SubbiahNoch keine Bewertungen
- Vibration 2markesDokument7 SeitenVibration 2markesTonyAntonyNoch keine Bewertungen
- DTS Q Iat 2Dokument2 SeitenDTS Q Iat 2Ramaswamy SubbiahNoch keine Bewertungen
- Me8651 DTS 1Dokument2 SeitenMe8651 DTS 1Ramaswamy SubbiahNoch keine Bewertungen
- Model TestsDokument3 SeitenModel TestsRamaswamy SubbiahNoch keine Bewertungen
- Damped VibrationsDokument13 SeitenDamped VibrationsSathrudhan ChoudharyNoch keine Bewertungen
- D Alembert PrincipleDokument11 SeitenD Alembert PrincipleManu Mathew Cherian100% (2)
- Vibration 2markesDokument7 SeitenVibration 2markesTonyAntonyNoch keine Bewertungen
- Vibration 2markesDokument7 SeitenVibration 2markesTonyAntonyNoch keine Bewertungen
- D Alembert PrincipleDokument11 SeitenD Alembert PrincipleManu Mathew Cherian100% (2)
- Wall Correctiomn PDFDokument466 SeitenWall Correctiomn PDFRamaswamy SubbiahNoch keine Bewertungen
- 17871565Dokument5 Seiten17871565Agustin A.Noch keine Bewertungen
- Brain ChipsDokument3 SeitenBrain ChipsRamaswamy Subbiah100% (1)
- Eye Directive WheelchairDokument4 SeitenEye Directive WheelchairRamaswamy SubbiahNoch keine Bewertungen
- FreeVibrations Freestudy Co UkDokument0 SeitenFreeVibrations Freestudy Co Ukdeepak_dce_meNoch keine Bewertungen
- New Microsoft Office Word DocumentDokument4 SeitenNew Microsoft Office Word DocumentRamaswamy SubbiahNoch keine Bewertungen
- Neptuno ING BajaDokument4 SeitenNeptuno ING BajaTrinhDinhLocNoch keine Bewertungen
- Chiu 2020Dokument6 SeitenChiu 2020Vijay KumarNoch keine Bewertungen
- Product Comparisons Avaya IP Office Vs Panasonic KX TDA and EDokument2 SeitenProduct Comparisons Avaya IP Office Vs Panasonic KX TDA and Ejorgerh1017100% (1)
- FDR HHDLU UsermanualDokument19 SeitenFDR HHDLU UsermanualMuhammad SyukurNoch keine Bewertungen
- RESUME - Docx ChanduDokument2 SeitenRESUME - Docx Chanduchandu maddipatlaNoch keine Bewertungen
- B.tech Cyber SecurityDokument166 SeitenB.tech Cyber SecurityRohit Singh BhatiNoch keine Bewertungen
- 2 Car Sensors V1-TemperatureDokument35 Seiten2 Car Sensors V1-TemperatureWNoch keine Bewertungen
- Amb Training Yokogawa PDFDokument574 SeitenAmb Training Yokogawa PDFambranja100% (1)
- Manually Drop Dbconsole Repository in 11gDokument3 SeitenManually Drop Dbconsole Repository in 11gG.R.THIYAGU ; Oracle DBA100% (1)
- Python FundamentalsDokument4 SeitenPython Fundamentalsunknown45Noch keine Bewertungen
- 1.3-5 Installing Device DriverDokument28 Seiten1.3-5 Installing Device DriverMaykel Uryeta MamitzNoch keine Bewertungen
- Dictionary in C# - Windows App TutorialsDokument1 SeiteDictionary in C# - Windows App TutorialsIvan HorvatNoch keine Bewertungen
- Software Architecture - Pipe and Filter Model: Seema Joshi Instructor: Dr. Yugi Lee CS 551Dokument9 SeitenSoftware Architecture - Pipe and Filter Model: Seema Joshi Instructor: Dr. Yugi Lee CS 551Anonymous R4nJyINoch keine Bewertungen
- L14 DriveProgrammingwiththeNewPowerFlex PDFDokument84 SeitenL14 DriveProgrammingwiththeNewPowerFlex PDFstinkystuffNoch keine Bewertungen
- Example-1: Power AmplifierDokument2 SeitenExample-1: Power AmplifierKahina ZitouniNoch keine Bewertungen
- Manual Controladora Lsi 9750 PDFDokument7 SeitenManual Controladora Lsi 9750 PDFRafa MartinsNoch keine Bewertungen
- LG w1943sb Lgd-tlc1 SMDokument42 SeitenLG w1943sb Lgd-tlc1 SMmirkovsNoch keine Bewertungen
- GatekeeperDokument6 SeitenGatekeeperSundeep RaoNoch keine Bewertungen
- NimitDokument42 SeitenNimitAnirudh Singh BhandariNoch keine Bewertungen
- Mtcre 3Dokument5 SeitenMtcre 3SatriaNoch keine Bewertungen
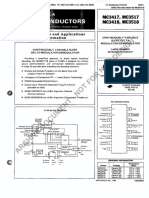
- IC - MC3417 - MC3418 - DatasheetsDokument20 SeitenIC - MC3417 - MC3418 - Datasheetsmnolasco2009Noch keine Bewertungen
- Proxmox Backup Documentation: Release 2.3.1 1Dokument213 SeitenProxmox Backup Documentation: Release 2.3.1 1DSNoch keine Bewertungen
- Mod MuxDokument116 SeitenMod MuxSnehashis BoseNoch keine Bewertungen
- How Does Radio Waves Works in Radio BroadcastingDokument2 SeitenHow Does Radio Waves Works in Radio BroadcastingFahmi DimacalingNoch keine Bewertungen
- Python Notes - 1Dokument364 SeitenPython Notes - 1hopefulantonelliNoch keine Bewertungen
- 5V 2A SMPS Circuit: User's ManualDokument4 Seiten5V 2A SMPS Circuit: User's ManualDarshan PatelNoch keine Bewertungen
- Otheros PrepDokument43 SeitenOtheros PrepAmrit TripathiNoch keine Bewertungen
- Schematic Diagram: 10-1 PowerDokument4 SeitenSchematic Diagram: 10-1 PowerElec ThaihoaNoch keine Bewertungen
- Docu 69328Dokument133 SeitenDocu 69328ionutg73Noch keine Bewertungen
- Tunde OlabiyisiDokument58 SeitenTunde OlabiyisiRajesh ShakyaNoch keine Bewertungen