Das könnte Ihnen auch gefallen
- High-Performance D/A-Converters: Application to Digital TransceiversVon EverandHigh-Performance D/A-Converters: Application to Digital TransceiversNoch keine Bewertungen
- Low-Power and Area-Efficient Shift Register Using Pulsed LatchDokument5 SeitenLow-Power and Area-Efficient Shift Register Using Pulsed LatchGowtham SpNoch keine Bewertungen
- PCX - ReportDokument15 SeitenPCX - ReportChristopher crNoch keine Bewertungen
- Power Reduction Through RTL Clock GatingDokument10 SeitenPower Reduction Through RTL Clock GatingAishwarya TekkalakotaNoch keine Bewertungen
- An Effective GDI (Gate Diffusion Input) Based 16 - Bit Shift Register Design For Power and Area OptimizationDokument9 SeitenAn Effective GDI (Gate Diffusion Input) Based 16 - Bit Shift Register Design For Power and Area OptimizationIJRASETPublicationsNoch keine Bewertungen
- Low-Power Viterbi Decoder Design For TCM DecodersDokument5 SeitenLow-Power Viterbi Decoder Design For TCM DecodersPooja BanNoch keine Bewertungen
- A 1.8V 12-Bit 230-MS/s Pipeline ADC in 0.18 M CMOS TechnologyDokument4 SeitenA 1.8V 12-Bit 230-MS/s Pipeline ADC in 0.18 M CMOS Technologyfaithfully_fatihNoch keine Bewertungen
- Automated Design Techniques For Low-Power High-Speed CircuitsDokument4 SeitenAutomated Design Techniques For Low-Power High-Speed CircuitsIrma AmeliaNoch keine Bewertungen
- A 160-Mhz, 32-B, 0.5-W Cmos Risc Microprocessor: MH ArmDokument14 SeitenA 160-Mhz, 32-B, 0.5-W Cmos Risc Microprocessor: MH ArmhikarivicNoch keine Bewertungen
- TP LeakagePowerOptimizationFlowDokument11 SeitenTP LeakagePowerOptimizationFlowSathyanarayana RaoNoch keine Bewertungen
- A Partially Static High Frequency 18T Hybrid Topological Flip-Flop Design For Low Power ApplicationDokument5 SeitenA Partially Static High Frequency 18T Hybrid Topological Flip-Flop Design For Low Power ApplicationRatnakarVarunNoch keine Bewertungen
- Comparative Analysis of Different Clock Gating TechniquesDokument55 SeitenComparative Analysis of Different Clock Gating Techniquesvsangvai26Noch keine Bewertungen
- An Analysis and Design of High Performance Power Consumption Double Tail Comparator Using Gated Clock and Power Gating TechniquesDokument7 SeitenAn Analysis and Design of High Performance Power Consumption Double Tail Comparator Using Gated Clock and Power Gating TechniquesIJIRSTNoch keine Bewertungen
- Pipeline Adc Thesis PDFDokument7 SeitenPipeline Adc Thesis PDFlauratorrestucson100% (2)
- Applied Sciences: A Novel Cross-Latch Shift Register Scheme For Low Power ApplicationsDokument11 SeitenApplied Sciences: A Novel Cross-Latch Shift Register Scheme For Low Power ApplicationsVaishnavi B VNoch keine Bewertungen
- A Digital Clock Multiplier For Globally Asynchronous Locally Synchronous DesignsDokument5 SeitenA Digital Clock Multiplier For Globally Asynchronous Locally Synchronous DesignsKulbhushan ThakurNoch keine Bewertungen
- TI Data Converter GuideDokument16 SeitenTI Data Converter GuideDavid PostonNoch keine Bewertungen
- High Order Programmable and Tunable Analog Filter ICDokument16 SeitenHigh Order Programmable and Tunable Analog Filter ICRahil JainNoch keine Bewertungen
- Clock GatingDokument10 SeitenClock Gatingpavanmk2501Noch keine Bewertungen
- Efficient Adaptive Hold Logic Reliable Multiplier Using Variable Latency DesignDokument4 SeitenEfficient Adaptive Hold Logic Reliable Multiplier Using Variable Latency DesignerpublicationNoch keine Bewertungen
- Optimized 2Nd Order Continuous-Time Sigma-Delta Modulator With 29.92Μw Power, 137.27 Db Snr, And 10Mhz BandwidthDokument11 SeitenOptimized 2Nd Order Continuous-Time Sigma-Delta Modulator With 29.92Μw Power, 137.27 Db Snr, And 10Mhz Bandwidthanshuanshu1987Noch keine Bewertungen
- SADGUNmajortheory MiniDokument52 SeitenSADGUNmajortheory MiniKotagiri AravindNoch keine Bewertungen
- Use Analog For Better Performance-To-Power RatiosDokument4 SeitenUse Analog For Better Performance-To-Power RatiosAdyPajuraNoch keine Bewertungen
- Project BookDokument68 SeitenProject Bookbabuhajju18Noch keine Bewertungen
- AN N-F F - O E: EW OLD LIP Flop With Utput NableDokument9 SeitenAN N-F F - O E: EW OLD LIP Flop With Utput NableLiu WenNoch keine Bewertungen
- A Review: High Speed Low Power Flash ADC: Rahul D. Marotkar, Dr. Manoj S. NagmodeDokument4 SeitenA Review: High Speed Low Power Flash ADC: Rahul D. Marotkar, Dr. Manoj S. NagmodeSunil PandeyNoch keine Bewertungen
- High-Speed Low-Power Viterbi Decoder Design For TCM DecodersDokument13 SeitenHigh-Speed Low-Power Viterbi Decoder Design For TCM DecodersPooja BanNoch keine Bewertungen
- Low Power and Area Efficient Static Differential Sense Amplifier Shared Pulse LatchDokument8 SeitenLow Power and Area Efficient Static Differential Sense Amplifier Shared Pulse LatchSesharatnam KoppulaNoch keine Bewertungen
- Ring Oscillator ThesisDokument8 SeitenRing Oscillator Thesisafjvbpyki100% (2)
- Theory and Applications of IncrementalDokument13 SeitenTheory and Applications of Incremental翁偉倫Noch keine Bewertungen
- A Low Power A - D Converter 05613669Dokument4 SeitenA Low Power A - D Converter 05613669Romualdo Begale PrudêncioNoch keine Bewertungen
- Amplifier DesignDokument9 SeitenAmplifier Designian neymarNoch keine Bewertungen
- Low-Power and Area-Efficient Shift Register Using Pulsed LatchesDokument16 SeitenLow-Power and Area-Efficient Shift Register Using Pulsed LatchesGowtham SpNoch keine Bewertungen
- Asynchronous ChipsDokument25 SeitenAsynchronous ChipsAbin Varkey Varghese100% (1)
- Ijetr022661 PDFDokument3 SeitenIjetr022661 PDFerpublicationNoch keine Bewertungen
- A Synchronous ChipDokument22 SeitenA Synchronous ChipAbhinay AgrawalNoch keine Bewertungen
- Low-Power and Area-Efficient Shift Register Using Pulsed LatchesDokument8 SeitenLow-Power and Area-Efficient Shift Register Using Pulsed LatchesSesharatnam KoppulaNoch keine Bewertungen
- SurajpaperDokument79 SeitenSurajpaperSooraj SattirajuNoch keine Bewertungen
- Design & Analysis of Different Types of Sleepy Methods For Future TechnologiesDokument6 SeitenDesign & Analysis of Different Types of Sleepy Methods For Future TechnologiesseventhsensegroupNoch keine Bewertungen
- 8.my RecentDokument53 Seiten8.my RecentRaoNoch keine Bewertungen
- Low-Power and Area-Efficient Shift Register Using Pulsed Latches With CMOS TechnologyDokument6 SeitenLow-Power and Area-Efficient Shift Register Using Pulsed Latches With CMOS TechnologySesharatnam KoppulaNoch keine Bewertungen
- Low Power VLSI Design of Modified Booth MultiplierDokument6 SeitenLow Power VLSI Design of Modified Booth MultiplieridescitationNoch keine Bewertungen
- Performance Comparison of Various Clock Gating Techniques: S.V.Lakshmi, P.S.Vishnu Priya, Mrs.S.PremaDokument6 SeitenPerformance Comparison of Various Clock Gating Techniques: S.V.Lakshmi, P.S.Vishnu Priya, Mrs.S.PremayanaNoch keine Bewertungen
- Designing Low Power Subthreshold Logic Circuits Using AFEDokument8 SeitenDesigning Low Power Subthreshold Logic Circuits Using AFENovelty JournalsNoch keine Bewertungen
- Analog Challenge of Nanometer CMOSDokument8 SeitenAnalog Challenge of Nanometer CMOSurpublicNoch keine Bewertungen
- A 1.8Ghz Cmos: Low-Power Truly-Modular Programmable Divider in Standard TechnologyDokument4 SeitenA 1.8Ghz Cmos: Low-Power Truly-Modular Programmable Divider in Standard TechnologyMuhammad_Swilam_2010Noch keine Bewertungen
- ME Notes Unit 4 Part 3 Low Power IC and RFICsDokument5 SeitenME Notes Unit 4 Part 3 Low Power IC and RFICssayan.transcuratorsNoch keine Bewertungen
- Operational Transconductance Amplifier Research PaperDokument6 SeitenOperational Transconductance Amplifier Research PaperafeawjjwpNoch keine Bewertungen
- Digital Storage Oscilloscope (DSO) Working Principle & Block DiagramDokument9 SeitenDigital Storage Oscilloscope (DSO) Working Principle & Block DiagramishwarNoch keine Bewertungen
- Review Article: Device and Circuit Design Challenges in The Digital Subthreshold Region For Ultralow-Power ApplicationsDokument16 SeitenReview Article: Device and Circuit Design Challenges in The Digital Subthreshold Region For Ultralow-Power ApplicationsFemin VargheseNoch keine Bewertungen
- A Low-Power 8-Read 4-Write Register File DesignDokument4 SeitenA Low-Power 8-Read 4-Write Register File DesignEdmund LeongNoch keine Bewertungen
- Low Power 6-Transistor Latch Design For Portable DevicesDokument16 SeitenLow Power 6-Transistor Latch Design For Portable DevicesjayalakshmisnairNoch keine Bewertungen
- RTL Design Techniques To Reduce The Power Consumption of FPGA Based CircuitsDokument6 SeitenRTL Design Techniques To Reduce The Power Consumption of FPGA Based Circuitsraees74Noch keine Bewertungen
- Impact of Hybrid Pass-Transistor Logic (HPTL) On Power, Delay and Area in VLSI DesignDokument6 SeitenImpact of Hybrid Pass-Transistor Logic (HPTL) On Power, Delay and Area in VLSI DesignIJMERNoch keine Bewertungen
- Desigine and Implimentation of Application Specific Low Power MultipliersDokument7 SeitenDesigine and Implimentation of Application Specific Low Power MultipliersSaiKishoreNoch keine Bewertungen
- A 10-Bit 5 Msample/s ADC: Two-Step FlashDokument9 SeitenA 10-Bit 5 Msample/s ADC: Two-Step FlashRaghav ChaudharyNoch keine Bewertungen
- Fig 1.1. ADC As An Interface Between Physical World and Digital ProcessorsDokument51 SeitenFig 1.1. ADC As An Interface Between Physical World and Digital ProcessorsSupriyo SrimaniNoch keine Bewertungen
- PLL DividerDokument6 SeitenPLL Divider081270Noch keine Bewertungen
- Efficient Design of 1Dokument7 SeitenEfficient Design of 1sumathiNoch keine Bewertungen
- Tappered Buffers Literature ReviewDokument5 SeitenTappered Buffers Literature ReviewZulfiqar AliNoch keine Bewertungen
- Iot Based Accident Prevention SystemDokument8 SeitenIot Based Accident Prevention SystemRatnakarVarunNoch keine Bewertungen
- A Partially Static High Frequency 18T Hybrid Topological Flip-Flop Design For Low Power ApplicationDokument5 SeitenA Partially Static High Frequency 18T Hybrid Topological Flip-Flop Design For Low Power ApplicationRatnakarVarunNoch keine Bewertungen
- A Partially Static High Frequency 18T Hybrid Topological Flip-Flop Design For Low Power ApplicationDokument5 SeitenA Partially Static High Frequency 18T Hybrid Topological Flip-Flop Design For Low Power ApplicationRatnakarVarunNoch keine Bewertungen
- FemtoRV32 Piplined Processor ReportDokument25 SeitenFemtoRV32 Piplined Processor ReportRatnakarVarunNoch keine Bewertungen
- Review of Rounding Based Approximate Multiplier (ROBA) For Digital Signal ProcessingDokument4 SeitenReview of Rounding Based Approximate Multiplier (ROBA) For Digital Signal ProcessingRatnakarVarunNoch keine Bewertungen
- Design of A 16-Bit Posit Multiplier With Power Efficiency: Monisha.R, Sivasakthi.VDokument4 SeitenDesign of A 16-Bit Posit Multiplier With Power Efficiency: Monisha.R, Sivasakthi.VRatnakarVarunNoch keine Bewertungen
- Strengthening of Beams Using Glass Fiber Reinforced Polymer (GFRP) LaminateDokument9 SeitenStrengthening of Beams Using Glass Fiber Reinforced Polymer (GFRP) LaminateRatnakarVarunNoch keine Bewertungen
- M.tech - Thesis SramsDokument69 SeitenM.tech - Thesis SramsRatnakarVarunNoch keine Bewertungen
- Calculator 1Dokument39 SeitenCalculator 1RatnakarVarunNoch keine Bewertungen
- Design of Low-Power Reduction-Trees in Parallel MultipliersDokument210 SeitenDesign of Low-Power Reduction-Trees in Parallel MultipliersRatnakarVarunNoch keine Bewertungen
- Software Requirements: 3.1GENERALDokument24 SeitenSoftware Requirements: 3.1GENERALRatnakarVarunNoch keine Bewertungen
- M-Tech Vlsi Projects List: S.No Project Title Year DesignDokument3 SeitenM-Tech Vlsi Projects List: S.No Project Title Year DesignRatnakarVarunNoch keine Bewertungen
- Design of Low Power High Speed Dynamic ComparatorDokument8 SeitenDesign of Low Power High Speed Dynamic ComparatorRatnakarVarunNoch keine Bewertungen
- IEEE 2020-2021 VLSI Project TitilesDokument2 SeitenIEEE 2020-2021 VLSI Project TitilesRatnakarVarunNoch keine Bewertungen
- Project 1 HFSS Tutorial Rectangular WGDokument23 SeitenProject 1 HFSS Tutorial Rectangular WGLive To LoveNoch keine Bewertungen
- IEEE 2020-2021 VLSI Project TitilesDokument2 SeitenIEEE 2020-2021 VLSI Project TitilesRatnakarVarunNoch keine Bewertungen
- VLSI-Latest Titles: S.No Project Code Project NameDokument10 SeitenVLSI-Latest Titles: S.No Project Code Project NameRatnakarVarunNoch keine Bewertungen
- RB Case Study DettolDokument31 SeitenRB Case Study DettolNitesh SantNoch keine Bewertungen
- Using Probability Distributions in R: Dnorm, Pnorm, Qnorm, and RnormDokument7 SeitenUsing Probability Distributions in R: Dnorm, Pnorm, Qnorm, and RnormRatnakarVarunNoch keine Bewertungen
- SC14 Proactive Memory Error AvoidanceDokument12 SeitenSC14 Proactive Memory Error AvoidanceRatnakarVarunNoch keine Bewertungen
- Design of High Speed Multiplier UsingDokument68 SeitenDesign of High Speed Multiplier UsingRatnakarVarun100% (1)
- Object Detection Using Convolutional Neural NetworksDokument6 SeitenObject Detection Using Convolutional Neural NetworksRatnakarVarunNoch keine Bewertungen
- Acceptance Letter in IJMETMR - Shaik Nabia & Shaik Iffath AnjumDokument1 SeiteAcceptance Letter in IJMETMR - Shaik Nabia & Shaik Iffath AnjumRatnakarVarunNoch keine Bewertungen
- LFSR-Based Generation of Multi Cycle TestsDokument9 SeitenLFSR-Based Generation of Multi Cycle TestsRatnakarVarun100% (1)
- Scalable Approach For Power Droop Reduction During Scan-Based Logic BistDokument9 SeitenScalable Approach For Power Droop Reduction During Scan-Based Logic BistRatnakarVarunNoch keine Bewertungen
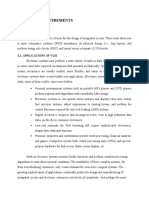
- 1.1 Image Fusion:: Implement of Hybrid Image Fusion Technique For Feature Enhancement in Medical DiagnosisDokument105 Seiten1.1 Image Fusion:: Implement of Hybrid Image Fusion Technique For Feature Enhancement in Medical DiagnosisRatnakarVarunNoch keine Bewertungen
- A Novel Approach To Multi Modal Hybrid Image Fusion Using Wavelet and Contourlet Transform For Medical Diagnosis ApplicationsDokument7 SeitenA Novel Approach To Multi Modal Hybrid Image Fusion Using Wavelet and Contourlet Transform For Medical Diagnosis ApplicationsRatnakarVarunNoch keine Bewertungen
- College Format DocumentDokument74 SeitenCollege Format DocumentRatnakarVarunNoch keine Bewertungen
- 7-Chapter 2Dokument31 Seiten7-Chapter 2RatnakarVarunNoch keine Bewertungen
- Scalable Approach For Power Droop Reduction During Scan-Based Logic BISTDokument4 SeitenScalable Approach For Power Droop Reduction During Scan-Based Logic BISTRatnakarVarunNoch keine Bewertungen
- Chapter8 SlidesDokument36 SeitenChapter8 Slidesrandomname112Noch keine Bewertungen
- Front and Back End Design of VLSI CircuitsDokument5 SeitenFront and Back End Design of VLSI CircuitsKamleshNoch keine Bewertungen
- VLSI SoC Design - Factors Affecting Delays of Standard Cells PDFDokument4 SeitenVLSI SoC Design - Factors Affecting Delays of Standard Cells PDFShesha PrasadNoch keine Bewertungen
- Design: PlanningDokument214 SeitenDesign: PlanningShounak DasNoch keine Bewertungen
- Chapter1 ASIC Design Flow EE3165Dokument98 SeitenChapter1 ASIC Design Flow EE3165Sư LưuNoch keine Bewertungen
- Training 3Dokument17 SeitenTraining 3Thomas George100% (1)
- EEE 4133 Lec-Aug 16Dokument23 SeitenEEE 4133 Lec-Aug 16Majba AhamadNoch keine Bewertungen
- Electronics 10 00271 v2Dokument22 SeitenElectronics 10 00271 v2rathorsumit2006Noch keine Bewertungen
- A Technique To Remove Glitches in Physical Design StageDokument120 SeitenA Technique To Remove Glitches in Physical Design Stageసుశీల్ శరత్Noch keine Bewertungen
- Physical Design For Block Level Implementation: Project ReportDokument20 SeitenPhysical Design For Block Level Implementation: Project ReportMahesh JagabattuniNoch keine Bewertungen
- 1 Quick Tour v1.0Dokument33 Seiten1 Quick Tour v1.0Harish KumarNoch keine Bewertungen
- Ic 616ece484 - Lab - 2020Dokument116 SeitenIc 616ece484 - Lab - 2020wang zhaoNoch keine Bewertungen
- Floorplan and PowerplanDokument30 SeitenFloorplan and PowerplanapoorvaNoch keine Bewertungen
- PD InputsDokument3 SeitenPD InputsShwethNoch keine Bewertungen
- Design and Simulation of 8 Bit Arithmetic Logic UnitDokument88 SeitenDesign and Simulation of 8 Bit Arithmetic Logic UnitBhuvnesh Kumar100% (1)
- Tanner EDA Simulation DetailedDokument125 SeitenTanner EDA Simulation DetailedJayaram KumarNoch keine Bewertungen
- Innovus addTieHiLoDokument2 SeitenInnovus addTieHiLosagarNoch keine Bewertungen
- Radiation Hardened Electronics: Product GuideDokument30 SeitenRadiation Hardened Electronics: Product GuideJuan LopezNoch keine Bewertungen
- ICC LG 03 PlacementDokument12 SeitenICC LG 03 PlacementchenNoch keine Bewertungen
- Physical Design For Nanometer IcsDokument21 SeitenPhysical Design For Nanometer IcsVineeta UpadhyayNoch keine Bewertungen
- 2 PD FlowDokument82 Seiten2 PD Flownagabhairu anushaNoch keine Bewertungen
- PD InputsDokument3 SeitenPD Inputsmohammed shahid shahNoch keine Bewertungen
- ASIC Interview QuestionsDokument8 SeitenASIC Interview QuestionsV SharmaNoch keine Bewertungen
- 3 - Combinational Logic Networks PDFDokument16 Seiten3 - Combinational Logic Networks PDFVarjula BalakrishnaNoch keine Bewertungen
- ASIC Design Methodology Using Cadence SP&R FlowDokument40 SeitenASIC Design Methodology Using Cadence SP&R FlowstepannpNoch keine Bewertungen
- Combination CircuitsDokument29 SeitenCombination CircuitsRohithGiridharanNoch keine Bewertungen
- Asic Design: RK Prasad Assistant Professor Department of EceDokument107 SeitenAsic Design: RK Prasad Assistant Professor Department of EceSri JalakamNoch keine Bewertungen
- Team VLSI SDCDokument11 SeitenTeam VLSI SDCNaganithesh GhattamaneniNoch keine Bewertungen
- Digiyal IcDokument22 SeitenDigiyal IcakhileshNoch keine Bewertungen
- Layout Interview Questions by Poornima JenarasDokument8 SeitenLayout Interview Questions by Poornima JenarasSuresh Kumar100% (3)
- Electronics All-in-One For Dummies, 3rd EditionVon EverandElectronics All-in-One For Dummies, 3rd EditionBewertung: 5 von 5 Sternen5/5 (2)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeVon EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeBewertung: 4.5 von 5 Sternen4.5/5 (10)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesVon EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesBewertung: 5 von 5 Sternen5/5 (1)
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tVon EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tBewertung: 4.5 von 5 Sternen4.5/5 (27)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionVon EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionBewertung: 4.5 von 5 Sternen4.5/5 (543)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosVon EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosBewertung: 5 von 5 Sternen5/5 (1)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsVon EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsBewertung: 3.5 von 5 Sternen3.5/5 (2)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialVon EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialBewertung: 3.5 von 5 Sternen3.5/5 (3)
- Retro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsVon EverandRetro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsNoch keine Bewertungen
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonVon EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonBewertung: 5 von 5 Sternen5/5 (2)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersVon Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersBewertung: 5 von 5 Sternen5/5 (1)
- Analog Design and Simulation Using OrCAD Capture and PSpiceVon EverandAnalog Design and Simulation Using OrCAD Capture and PSpiceNoch keine Bewertungen
- Current Interruption Transients CalculationVon EverandCurrent Interruption Transients CalculationBewertung: 4 von 5 Sternen4/5 (1)
- Build Your Own Electronics WorkshopVon EverandBuild Your Own Electronics WorkshopBewertung: 3.5 von 5 Sternen3.5/5 (3)
- A Mind at Play: How Claude Shannon Invented the Information AgeVon EverandA Mind at Play: How Claude Shannon Invented the Information AgeBewertung: 4 von 5 Sternen4/5 (53)
- Beginner's Guide to Reading Schematics, Third EditionVon EverandBeginner's Guide to Reading Schematics, Third EditionNoch keine Bewertungen
- Heat Transfer Engineering: Fundamentals and TechniquesVon EverandHeat Transfer Engineering: Fundamentals and TechniquesBewertung: 4 von 5 Sternen4/5 (1)
- Teach Yourself Electricity and Electronics, 6th EditionVon EverandTeach Yourself Electricity and Electronics, 6th EditionBewertung: 3.5 von 5 Sternen3.5/5 (15)
- Power Electronics Diploma Interview Q&A: Career GuideVon EverandPower Electronics Diploma Interview Q&A: Career GuideNoch keine Bewertungen