Das könnte Ihnen auch gefallen
- Intro VibrationDokument61 SeitenIntro VibrationSameer ShashwatNoch keine Bewertungen
- VibrationsDokument93 SeitenVibrationsbislerinit86% (7)
- Mechanical Vibrations (3) : July 2017Dokument94 SeitenMechanical Vibrations (3) : July 2017nataraj deshpandeNoch keine Bewertungen
- Mechanical Vibration: Eng DR Aravinda AbeygunawardaneDokument26 SeitenMechanical Vibration: Eng DR Aravinda AbeygunawardaneRashen DilNoch keine Bewertungen
- Mechanical Vibrations ME-307: Instructor: Luqman Ahmad Nizam Assistant Professor, HITEC University TaxilaDokument14 SeitenMechanical Vibrations ME-307: Instructor: Luqman Ahmad Nizam Assistant Professor, HITEC University TaxilaAbdullahJavedNoch keine Bewertungen
- Random VibrationsDokument20 SeitenRandom VibrationsVivek PandeyNoch keine Bewertungen
- Mechanical VibrationsDokument131 SeitenMechanical Vibrationsumudum.civilengineerNoch keine Bewertungen
- 1075-4643 - Lecture Notes Chapter 1Dokument9 Seiten1075-4643 - Lecture Notes Chapter 1Mottalab ShaonNoch keine Bewertungen
- Vibrations Formula Sheet Vibrations FullDokument5 SeitenVibrations Formula Sheet Vibrations FullmrslayerdudeNoch keine Bewertungen
- Elem Handouts Topics 1&2Dokument10 SeitenElem Handouts Topics 1&2Escalona, Michael Joshua S.Noch keine Bewertungen
- Mechanical Vibration IDokument43 SeitenMechanical Vibration IHesham AhmedNoch keine Bewertungen
- Vibration SyllabusDokument2 SeitenVibration SyllabusmuthuramprodNoch keine Bewertungen
- Kinematics of MachineryDokument65 SeitenKinematics of Machinerykumaravel07Noch keine Bewertungen
- Mechanical Vibration 2 Marks Questions With Answer: 1. What Is Meant by Vibrations?Dokument5 SeitenMechanical Vibration 2 Marks Questions With Answer: 1. What Is Meant by Vibrations?Mahendra PathakNoch keine Bewertungen
- CH 4 - The Vibrations of Systems Having TDOFDokument17 SeitenCH 4 - The Vibrations of Systems Having TDOFEmad ElsaidNoch keine Bewertungen
- Important QuestionsDokument8 SeitenImportant QuestionsdineshbabuNoch keine Bewertungen
- 2D Motion of A Particle Using Plan-Polar Coordinates: Velocity ComponentsDokument71 Seiten2D Motion of A Particle Using Plan-Polar Coordinates: Velocity Componentssharwan sharmaNoch keine Bewertungen
- Mechanical Vibration - MSD - Part 2Dokument9 SeitenMechanical Vibration - MSD - Part 2Mohammad Saad SalimNoch keine Bewertungen
- Kom Unit-IDokument18 SeitenKom Unit-IRamanathan DuraiNoch keine Bewertungen
- 1-Basic ConceptsDokument47 Seiten1-Basic Conceptsjaved hussainNoch keine Bewertungen
- Engineering Mechanics Notes2222Dokument100 SeitenEngineering Mechanics Notes2222rajasekharjvNoch keine Bewertungen
- Electrical Machine PDFDokument40 SeitenElectrical Machine PDFAanjenay PandeyNoch keine Bewertungen
- Introduction - Forces, Equilibrium: Chapter HighlightsDokument87 SeitenIntroduction - Forces, Equilibrium: Chapter HighlightsJagannath MandalNoch keine Bewertungen
- Macromechanics - 1: Generalized Hooke's Law For Anisotropic LaminaDokument32 SeitenMacromechanics - 1: Generalized Hooke's Law For Anisotropic LaminaIntan Khalida LukmanNoch keine Bewertungen
- GE6253 Engineering Mechanics 2 Mark With Answers R2013Dokument16 SeitenGE6253 Engineering Mechanics 2 Mark With Answers R2013sivakumarNoch keine Bewertungen
- Mechanical Vibrations: Luqman Ahmad NizamDokument19 SeitenMechanical Vibrations: Luqman Ahmad NizamSohaib IrfanNoch keine Bewertungen
- Vibrations of Two Degree of Freedom SystemsDokument28 SeitenVibrations of Two Degree of Freedom SystemsKautilyaChennaNoch keine Bewertungen
- Mechanical Vibrations Lecture NotesDokument133 SeitenMechanical Vibrations Lecture NotesHarrison AdemuNoch keine Bewertungen
- Fundamentals of Mechanical VibrationsDokument74 SeitenFundamentals of Mechanical VibrationsПараг ТамбеNoch keine Bewertungen
- Moment of InertiaDokument27 SeitenMoment of InertiaTemoor AbbasNoch keine Bewertungen
- Stresses in Machine ElementsDokument18 SeitenStresses in Machine ElementsthirumalaikumaranNoch keine Bewertungen
- Chapter 2Dokument149 SeitenChapter 2A LamperougeNoch keine Bewertungen
- ME2203 Subject Notes PDFDokument34 SeitenME2203 Subject Notes PDFRakeshkumarceg100% (1)
- Vibration: (BDA31103) Multi-Degree of FreedomDokument65 SeitenVibration: (BDA31103) Multi-Degree of FreedomhildaNoch keine Bewertungen
- Mechanical Vibrations: Why Do We Study ?Dokument27 SeitenMechanical Vibrations: Why Do We Study ?sagar kumarNoch keine Bewertungen
- Mechanical PropertiesDokument25 SeitenMechanical PropertiesUmesh ChandraNoch keine Bewertungen
- Statics Review PDFDokument26 SeitenStatics Review PDFSathyajith PinikeshiNoch keine Bewertungen
- Kinematics of Machinery Lecturer Notes All 5 UnitsDokument45 SeitenKinematics of Machinery Lecturer Notes All 5 Unitskumaravel07Noch keine Bewertungen
- Free Vibration With DampingDokument31 SeitenFree Vibration With Dampingriya pradhanNoch keine Bewertungen
- MoM Summary PointsDokument39 SeitenMoM Summary PointsAmmarNoch keine Bewertungen
- UNIT 1. Introduction To KOM PDFDokument40 SeitenUNIT 1. Introduction To KOM PDFAravind MuddebihalNoch keine Bewertungen
- Ideal and Practical TransformerDokument8 SeitenIdeal and Practical TransformerChintal.vinodNoch keine Bewertungen
- Strength of Materials: (SI Units)Dokument11 SeitenStrength of Materials: (SI Units)Fitra VertikalNoch keine Bewertungen
- EMDokument227 SeitenEMfaizu_ibmNoch keine Bewertungen
- Unit 1 - Two Mark Questions With Answers Oct 23Dokument4 SeitenUnit 1 - Two Mark Questions With Answers Oct 23mk24inNoch keine Bewertungen
- Multi Degree of Freedom MDOF VibaratoryDokument40 SeitenMulti Degree of Freedom MDOF Vibaratoryhanumantharaya100% (1)
- Multi Degrees of Freedom SystemDokument23 SeitenMulti Degrees of Freedom SystemHani BanatNoch keine Bewertungen
- Angular MomentumDokument10 SeitenAngular MomentumKlarence Medel PacerNoch keine Bewertungen
- Mechanical Vibration 2Dokument2 SeitenMechanical Vibration 2Nizar MachmudNoch keine Bewertungen
- Relative MotionDokument3 SeitenRelative Motionkaushik247Noch keine Bewertungen
- Chapter 1 & 2 - Introduction To Vibrations and Single DOF SystemsDokument86 SeitenChapter 1 & 2 - Introduction To Vibrations and Single DOF SystemsMohamad Faiz TonyNoch keine Bewertungen
- Unit-I 5Dokument17 SeitenUnit-I 5Nafoora ProjectsNoch keine Bewertungen
- Mechanical Vibrations Experiment Leaf PDFDokument9 SeitenMechanical Vibrations Experiment Leaf PDFfariskolej4946Noch keine Bewertungen
- Sau 1304Dokument126 SeitenSau 1304Emmanuella EmefeNoch keine Bewertungen
- Chapter One: 1.1 Basic Concepts of VibrationDokument6 SeitenChapter One: 1.1 Basic Concepts of VibrationShuguta LatiNoch keine Bewertungen
- Basic Principles of VibrationsDokument6 SeitenBasic Principles of Vibrationsdskumar49Noch keine Bewertungen
- اهتزازاتDokument31 SeitenاهتزازاتMoataz AlorfeNoch keine Bewertungen
- Negative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 3: Gravitational and Inertial Control, #3Von EverandNegative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 3: Gravitational and Inertial Control, #3Noch keine Bewertungen
- NLMALLJEEO1Q56Dokument13 SeitenNLMALLJEEO1Q56Rahul RNoch keine Bewertungen
- Gas Insulated Substation: Electrical Engineering DepartmentDokument24 SeitenGas Insulated Substation: Electrical Engineering DepartmentChandrika Reddy2727Noch keine Bewertungen
- Voltage Unbalance and It's Impact On The Performance of Three Phase Induction Motor: A ReviewDokument6 SeitenVoltage Unbalance and It's Impact On The Performance of Three Phase Induction Motor: A ReviewSunil SinghNoch keine Bewertungen
- Determining Natural Convection Heat Transfer Coefficient of Human BodyDokument8 SeitenDetermining Natural Convection Heat Transfer Coefficient of Human BodyNora GuzmanNoch keine Bewertungen
- Eddy Current LossDokument20 SeitenEddy Current LossAnonymous bau06xStTNoch keine Bewertungen
- NEMA Vacuum Break Contactors and StartersDokument18 SeitenNEMA Vacuum Break Contactors and StartersMoiReyesNoch keine Bewertungen
- Solid State Control of Synchronous Motor & PMSMDokument42 SeitenSolid State Control of Synchronous Motor & PMSMNitish50% (2)
- R7 210205 Electromagnetic FieldsDokument2 SeitenR7 210205 Electromagnetic FieldssivabharathamurthyNoch keine Bewertungen
- 5.troubleshooting of TransformerDokument3 Seiten5.troubleshooting of Transformerprotection50% (2)
- IV. Moment of A ForceDokument4 SeitenIV. Moment of A ForceJohn Kristoffer VillarNoch keine Bewertungen
- Series LCR CircuitDokument24 SeitenSeries LCR Circuitspidy warriorsNoch keine Bewertungen
- KuramoDokument6 SeitenKuramoMastok SamadNoch keine Bewertungen
- Us Cat Seismic Bracing Systems 5151 IlDokument48 SeitenUs Cat Seismic Bracing Systems 5151 IlGianpietro de FilippoNoch keine Bewertungen
- Chapter 10Dokument18 SeitenChapter 10WiltuzNoch keine Bewertungen
- St. Paul'S Academy: Purba BardhamanDokument4 SeitenSt. Paul'S Academy: Purba BardhamanBHRAMAR DHARANoch keine Bewertungen
- Fiitjee: Talent Reward Exam - 2020Dokument46 SeitenFiitjee: Talent Reward Exam - 2020abhinav100% (1)
- Magnetically Coupled Circuits: Chapter ObjectivesDokument25 SeitenMagnetically Coupled Circuits: Chapter ObjectivesNitin MarwahNoch keine Bewertungen
- Bioseparation EngineeringDokument91 SeitenBioseparation EngineeringDiego SanzNoch keine Bewertungen
- Class Notes Planar 1Dokument63 SeitenClass Notes Planar 1musiomi2005Noch keine Bewertungen
- Batch 3 Report 18.06.22Dokument68 SeitenBatch 3 Report 18.06.22Sujesh ChittarikkalNoch keine Bewertungen
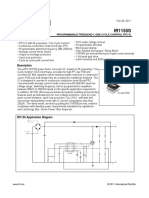
- Features: Programmable Frequency, One Cycle Control PFC IcDokument21 SeitenFeatures: Programmable Frequency, One Cycle Control PFC IcАлексей АндрияшNoch keine Bewertungen
- 12 DM Ship WaveDokument27 Seiten12 DM Ship Waveharold1aguirre-1Noch keine Bewertungen
- Questions and Answers On TransformersDokument2 SeitenQuestions and Answers On TransformersSaber AbdelaalNoch keine Bewertungen
- HKCCCU Logos Academy Physics Worksheet - Chapter 2 Electric Circuit 2.1 Electric CurrentDokument24 SeitenHKCCCU Logos Academy Physics Worksheet - Chapter 2 Electric Circuit 2.1 Electric CurrentHiHiNoch keine Bewertungen
- Practical Viva PhysicsDokument4 SeitenPractical Viva PhysicsPulkit JainNoch keine Bewertungen
- Practical Approach in Designing Conducted EMI Filter To Mitigate Common Mode and Differential Mode Noises in SmpsDokument20 SeitenPractical Approach in Designing Conducted EMI Filter To Mitigate Common Mode and Differential Mode Noises in Smpsbacuoc.nguyen356Noch keine Bewertungen
- 43 TMSS 01 R0Dokument0 Seiten43 TMSS 01 R0renjithas2005Noch keine Bewertungen
- Time Domain Electromagnetic MethodsDokument16 SeitenTime Domain Electromagnetic MethodsAydin Nejati100% (1)
- Applying Pascal's PrincipleDokument3 SeitenApplying Pascal's Principlemrs azizi50% (2)
- Es 62Dokument6 SeitenEs 62Enrico Luis Caube BalisalisaNoch keine Bewertungen