Beruflich Dokumente
Kultur Dokumente
Pipe Support Attachment WRC Analysis
Hochgeladen von
kalpeshbndOriginaltitel
Copyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
Pipe Support Attachment WRC Analysis
Hochgeladen von
kalpeshbndCopyright:
Verfügbare Formate
Proceedings of the ASME 2013 Pressure Vessels & Piping Division Conference
PVP2013
July 14-18, 2013, Paris, France
PVP2013-97622
STRESS ANALYSIS OF PIPE SUPPORT ATTACHMENTS: A COMPARISON OF
ANALYTICAL METHODS AND FINITE ELEMENT ANALYSIS FOR CIRCULAR AND
NON-CIRCULAR ATTACHMENTS
Anindya Bhattacharya
Technical Head, Stress Analysis
CB&I, 40 East Bourne Terrace, London, W2 6LG,
United Kingdom.
Phone: +442070535668
ABSTRACT
4. Comparison of FEA, WRC 107, WRC297 and “Kellogg”
Despite the availability of special purpose FE codes with
methods w.r.t the following parameters:
post processing facilities as per rules of ASME SEC VIII
• Type of loading (Radial, Longitudinal, Circumferential)
Division 2, use of simple analytical methods like ring loading
applied in a “ stand-alone manner” is absence of pressure
around a circumference or more complex methods like
Welding Research council bulletins 107 and 297, will continue • D , t and d ratios
T T D
to be used in the industry for a significant period of time for
• Combined loading including pressure
stress analysis of pipe support attachments. The reasons are
• Different element types
few: not all engineering companies have such custom made
FE codes, lack of trained personnel to work with general
NOMENCLATURE
purpose FE codes, ease of implementation of the available
methods and their successful design history, cost and time ξ , ϕ - components in the ( ξ ,ϕ ) coordinate of the main
issues with FE analysis etc. In this paper these available shell
methods will be reviewed based on their theoretical r,R - mid surface radii of the branch pipe and main shell
background, their range of applicability w.r.t the typical design E,ν - Young’s modulus and Poisson ratio respectively
parameters and their comparison with FE analysis. More un - radial displacement
recent analytical methods based on mathematically accurate
space curves of intersections for circular attachments will also ρ0 - diameter ratio = d
D
be discussed. This study will include both circular as well as T - thickness of main shell
non-circular attachments. This paper will highlight the φ - Airy stress function
strengths and weaknesses of the conventionally used methods
p - internal pressure
especially with respect to their mathematical limitations to
make an analyst aware of the potential over conservatism and ρ ,θ ,z - global cylindrical coordinates in 3D space
under conservatism of these analytical methods. Finite
pξ , pϕ - surface force components in the directions
element analysis models will be discussed in detail
specifically in relation to elements used, element parameters, w - vertical displacement
boundary conditions and post processing. ET 3
H - flexural rigidity of shell =
INTRODUCTION 12( 1 − µ 2 )
Z - loading in vertical direction
In this paper, the subject matter has been structured in the
t - thickness of attached shell
following manner:
1. Discussion of the available theoretical methods, from the ET
K - foundations stiffness = 2
simplest to the advanced. R
2. Brief overview of basic shell mathematical model. x - direction of longitudinal axis of cylinder
3. Brief overview of available finite element options. S - section modulus of the trunnion pipe
A - area of cross section of trunnion pipe
1 Copyright © 2013 by ASME
2. AVAILABLE THEORETICAL APPROACHES TO
M - resultant applied bending moment on trunnion
THE PROBLEM OF ANALYSING A CYLINDRICAL
P - load per unit of circumference (applied as a ring
SHELL WITH CYLINDRICAL OR NON-CYLINDRICAL
load)
ATTACHMENTS.
rt - radius of trunnion
F - force on trunnion 2.1 Approach 1:
β1 , β 2 - attachment parameters for rectangular attachments = This approach is popularly known as “Kellogg” method in
c1 c the piping industry. This approach has been so named as it
& 2 appeared for the first time in [4] and is based on ring loading
R R
around a circular cylinder.
c1 , c2 - half dimensions of the rectangle along
circumferential and meridional directions Governing differential equation [1]:
respectively For an axi-symmetric loading on a circular cylinder, the
∇ 2 - Laplacian Operator, ∇.∇ ( ) governing differential equation is the well known beam on
elastic foundation equation:
1. SHELL THEORIES:
d 4w
There are various shell theories and each one has its own H 4 + Kw = Z (1)
dx
protagonist. Any shell theory has to be evaluated within the
d 4 w ETw Z
postulates of Sanders-Koiter’s approach [12, 21] which can be + = (2)
summarised as follows: dx 4 HR 2 H
1. The equations can be written in general tensor form. 3( 1 − µ 2 ) 1.28
2. The deformations are described by six strain measures, Introducing β 4 = 2 2
, i.e. β = considering
RT RT
three of which are components of the usual membrane strain
µ = 0.3 .
tensor and the other three deviate from the components of the
geometrical curvature change tensor only by terms that are we therefore get
bilinear in the components of the curvature and membrane
strain tensor. d 4w Z
3. The stresses are described by six stress measures that satisfy 4
+ 4β 4 w = (3)
dx H
the equations of equilibrium without approximation.
4. The theory has a principle of virtual work that is exact for The solution of this differential equation and boundary
displacements obeying the Kirchoff hypothesis; in conjunction conditions are detailed in [1]
with approximate constitutive relations between the stress and Extending the above analysis to a case of bending of a
strain measures. Well-set boundary value problems can be cylindrical shell by a load uniformly distributed along a
formulated, and the usual minimum and reciprocal relations of circular section [1], we get:
structural mechanics hold good. P
Maximum Bending Moment = , where P= load per unit
5. The theory contains an exact static-geometric analogy. This 4β
analogy can be formulated by replacing the static quantities by length of circumference.
corresponding geometrical quantities in homogeneous
1.17 P R
equations of equilibrium and the resulting equations become Bending stress, σ bending = (4)
1.5
identical with the compatibility conditions. T
6. When applied to the symmetrical bending of shells of
revolution, the stress and strain measures agree with those P, can be defined in terms of a local radial load, Pr and local
generally used. They are consistent with those of the most moment, M r . This is necessary because P is a line load
simple curved beam theory. distributed around the circumference of the shell.
For the present purpose, we will discuss the issue of If a load Pr is divided by the attachment perimeter it becomes
cylindrical pipes with circular (referred to as trunnion) as well
Pr
as non-circular (referred to as pipe shoes) attachments. Hence for a nozzle of radius, rt . or a moment over section
there is no “puncture” in the header pipe. The mathematical 2πrt
problem of the main shell with cut-out is a boundary value Mr
modulus of the attachment becomes, .
problem of partial differential equation. It means that the πrt2
cylindrical shell equation, whose general solutions have many
Flexural stresses are added to membrane longitudinal and
unknown constants, is suitable on the shell surface with or
hoop stresses to get total stress = membrane stress in direction
without cut-out. In order to determine the unknown constants
i + flexural stresses in direction i computed by the expression
the boundary conditions have to be used.
in eq-(4)
2 Copyright © 2013 by ASME
To compute P, these were the steps followed:
Computation of loads in longitudinal and circumferential
directions by use of the following expressions:
• longitudinal force = (longitudinal force x moment
arm)/ πrt2
• circumferential force = (circumferential force x moment
arm)/ πrt2
• radial force = radial load/ 2πrt
• equivalent circumferential force = 2 x circ. force + 1.5 x
radial force
• equivalent longitudinal force = 1.5 x radial force +
longitudinal force
The above forces are used as P in eq-(4)
The reason behind the use of the factors 1.5 and 2.0 is
attributed to higher flexibilities in these directions.
The flexural stresses in longitudinal and circumferential
directions are then computed using these “equivalent” forces
and the membrane pressure stresses are then added to compute
the total stresses. Stress in the trunnion attachment is
F M
computed as + .
A S
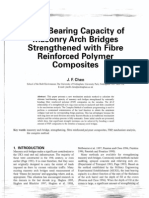
2.1.1. The case of Pipe shoes:
Schematic arrangements for some pipe shoes are shown in
fig-(1). Dimension B stands for shoe/gusset width, G =
number of gussets, L = gusset spacing (this depends on the
design), S = number of spines, M = spine spacing, and A=
shoe length.
The approach taken for analysis of pipe shoes is similar to
that of trunnion type attachments. The computations of section
properties (few examples) are cited.
1. Pipe shoe with no gusset:
3
longitudinal moment of inertia = A
12
distance to centroid, longitudinally = A
2
moment of inertia, circumferential = A
12
distance to centroid = B
2
2. Pipe shoe with 4 gussets:
3
longitudinal moment of inertia = A + 5 BL2
12 9
distance to centroid = A
2
3
moment of inertia, circumferential = B
3
distance to centroid = B
2
3 Copyright © 2013 by ASME
Fig-(2) [31, 25]
Bijlaard applied the radial force system, qn instead of
vertical force system, qz . When subjected to a radial force
system the resultants not only include moments, M xb or M yb
but also force, Fyb . This will be statically equivalent to
Fig-(1). Schematic design of some common pipe shoe types. external load Z involving force, Fzb , transverse bending
3. Saddle: moment, M xb and longitudinal bending moment, M yb . The
moment of inertia, longitudinal = A
3
+ BL
2 figure below shows the transverse bending moment, M xb case.
6 12
In fig-3(a), the linearly distributed force system, qz is
distance to centroid = A statically equivalent to the transverse bending moment, M xb
2
3 2
moment of inertia, circumferential = B + AB but in fig-3(b), the linearly distributed force system, qn is
6 2
statically equivalent to the transverse bending moment, M xb
distance to centroid = B
2 and force, Fy as in fig-3(d).
2.2 Approach 2: The WRC-107 approach based on
the work of Bijlaard [34, 26, 2]
Bijlaard derived a theoretical solution based on
Timoshenko equations [1, 26] for a cylindrical shell on end
supports under a force system, qn linearly distributed over a
ρ0
square region defined by ξ ≤ c , ϕ ≤ c , where c = in
2
the developed surface. In deriving the equations it has been
assumed that ε 0 = 0 (circumferential strain).
The force/moment system is shown in fig-(2) below
4 Copyright © 2013 by ASME
Fig-(3) [25]
ϕ ϕ • Circumferential Moment ( taken from A.3.3.2 and Table
qz = qn cos ϕ = qn 0 cos ϕ , q y = qn sin ϕ = qn 0 sin ϕ (5) A-4 of WRC 107)
ϕ0 ϕ0
For the thin walled model, the measured circumferential
ϕ0 ϕ0 ϕ
M x = 2c ∫ q z Rc sin ϕ dϕ = 2c 2 R ∫ qn 0 cos ϕ sin ϕ d ϕ and longitudinal stresses were both higher than the computed
−ϕ 0 −ϕ0 ϕ0 values. Modifications were then done to Bijlaard's original
(6) work for both longitudinal and circumferential stresses for the
ϕ0 ϕ0 ϕ bending components (and for the circumferential stress, for the
Fy = 2c ∫ q y c d ϕ = 2c 2 ∫ qn 0 sin ϕ d ϕ (7) membrane component also) but for longitudinal stresses there
−ϕ 0 −ϕ 0 ϕ0
was minimal requirement for correction of the membrane
Bijlaard used Double Fourier Series to represent loads and component. Correction factor used was around 2.7 for bending
displacements. component of circumferential stress + 20-25% for membrane
component and correction factor of 2.72 was used for bending
The limitations of Bijlaard’s approach are the d ≤ 0.3
D component of longitudinal stress (no correction for membrane
and the usage of Double Fourier series method which may not component). It is stated in WRC-107 that the modified curves
show convergence for certain boundary conditions [32, 26]. may be more conservative than the original work.
The limitation of d is due to the use of radial force instead • Longitudinal Moment ( taken from A.3.3.2 and Table A-4
D
of WRC 107)
of vertical force. This results in significant error outside
For the thin walled model, the measured circumferential
aforementioned d limit. The stresses are computed in 8 and longitudinal stresses were both higher than the computed
D
specific locations around the intersection. The maximum values. Corrections were made to both the Membrane and
stresses need not be at these locations! Additionally stresses in Bending components. For the Longitudinal stress, no
Trunnion/Shoes cannot be computed. For rectangular correction was required for the Membrane component. Higher
attachments, the limitation is β1 & β2 < 0.5 . modification was required for membrane component (30%)
compared to bending component (18%) for circumferential
It is to be noted that WRC-107 is not only based on
stress. Correction factor used was 6.75 in bending component
Bijlaard’s theoretical work but also experimental works by
of longitudinal stress (no correction for membrane component)
Mehrson, Wichman and Hopper [34]. The bulletin shows a
comparison of the calculated and measured stresses for both • Radial Load ( taken from A.3.3.4 and Table A-6 of WRC-
thick walled models and thin walled models. Following were 107)
the main issues between the Experimental works and Results agreed well on the transverse axis but the
Bijlaard’s work for thin shells. theoretical results were conservative by factors as high as 2.0
on the longitudinal axis.
5 Copyright © 2013 by ASME
on the longitudinal axis. Results for transverse axis agreed Based on this line of reasoning in-order to extend the
dm Dm applicability of the thin shell theoretical solution for
well for cases that are restricted by ≤2 cylindrical shells with cut-out, Xue et al adopted Morley’s
Dm T equation [9], which has the same order of magnitude of
2.3 Approach 3: Post WRC-107 approaches – WRC-
297 and works of Morley, Simmonds and Hwang et
R ( )
accuracy as the general thin shell theory, i.e. O T , instead
al. [5, 33, 11, 16, 25] of Donnell’s. Morley’s equation is expressed in complex-
valued form by Simmonds [11] as follows:
Theory of thin elastic shells, in which T/R<<1 is
4 2 ∂
2
χ = P ( pξ , pϕ , p )
insignificant in magnitude is derived on the basis of Love-
∇ + ∇ − 4µ i 2
2
(11)
Kirchhoff assumptions. A generally accepted fact is this ∂ξ
( )
approach has an error of order of magnitude O T .
R where, χ and µ are the same as in eq-(10) and (9). The right
When a solution is derived by omitting some terms, which hand side of eq-(11) is a load function dependent on the
has order of magnitude larger than O T ( )
R
(such as surface force components acting on the shell.
( )
The cylindrical thin shell equations derived by
O T for shallow shell equations), the accuracy of the Goldenveizer, Morley, Simmonds and Timoshenko (which
R
was used by Bijlaard) have the same inherent error in order of
( )
solution is bound to be lower. The detailed analysis of the
above-mentioned concept can be found in well-known magnitude O T . The solution has the order of accuracy
R
literature and textbooks of thin shell theory [6].
The “exact” equations for thin elastic cylindrical shells are ( )
O T . WRC-297, which is based on Steele’s work on
R
very complicated. For a problem of cylindrical shell with cut- shallow shell equations covers a range of only
out [25], Donnell [8] presented an approximate equation
( )
r ≤ sin π < 0.5 .
(omitting terms of order of magnitude O ( R
T
)
) from
R 6
For detailed analysis of the approach taken by Xue et al
Flügge’s equation [13]. This equation is quite simple and can refer [17, 31].
be expressed in complex-valued displacement-stress function In essence, the approach taken is to use compatibility
form (Lekkerkerker [15] and Steele [3]) as follows: conditions enforced on the geometrically correct curve of
intersection as opposed to an assumed curve of intersection
4 2 ∂
( )
2
∇ − 4 µ i χ = 0 (8) and using theories which are of order O T which may or
∂ξ 2
R
may not involve using different shell theories for intersecting
4 µ = 12 (1 −ν 2 )
2 R cylinders.
(9)
T To summarize, different cylindrical shell equations are
4µ 2 suitable to different ranges of the developed surface. Fig-(4)
χ = un + i φ (10) below shows the different ranges of developed surface [25].
ETR
where, un , is radial displacement and φ , Airy stress function.
Eq-(8) can be decomposed into two second-order partial
differential equations and is easy to solve in polar coordinate
system for the problem of cylindrical shell with cut-out [25].
However, as pointed out by Koiter, eq-(8) can only be applied
for shallow shells. Koiter [7] had written, “It has been noted
[9,14] that Donnell’s approximation is sometimes inaccurate”
and “the generalization of Donnell’s approximation is
applicable in the case of shallow shells in which the wave
length L of the deformation pattern on the middle surface is
always small compared with the minimum principal radius of
curvature R”. Based on fig-6.14 in Donnell’s book [10], the
applicable range of shallow shell equation for the problem of
R ( )
cylindrical shell with opening is only r ≤ sin π = 0.5 .
6
The edge effects of general cylindrical shells and shallow
shells mathematically differ.
6 Copyright © 2013 by ASME
methods like FEM as currently an engineer in an industry does
not have an easy tool to compare the FE results against some
published benchmarks for d >0.5. In other words, as long as
D
we do not have analytical tools which are easily
implementable and which will address the problems to be
analyzed without having significant restrictions on geometry
and loading conditions, FE analysis should be the preferred
tool for analysis. The objective of this paper is to make an
analyst aware of the potential over conservatism and under
conservatism in the available and widely used methods if an
analyst is constrained to use them.
4.0 FINITE ELEMENT ANALYSIS APPROACH TO THE
PROBLEM
[33] provides an excellent discussion on the issues
involving conflicts between shell theory and finite element
analysis of shells. To briefly summarize them:
• Ill conditioning due to significantly different strain
energies between membrane and bending modes.
• Use of low degree polynomial trial functions in the
Fig-(4) [25]
displacement finite element method generally leads to
Donnel [10] showed that his shallow shell equations could overstiffness in the response to bending actions.
be suitable to the range of − π < ϕ < π i.e. ρ 0 < 0.5 . In • Difficulty in deriving trial functions for in-extensional
6 6
[15] Lekkerkerker showed that the shallow shell equations bending.
could be applied to the range of ρ0 ≤ 0.25 . The different Many authors [33, 18, 30] have recommended use of
applicable ranges adopted by different authors are dependant hybrid elements. In this paper, however, we have used only
on different allowable intrinsic errors. displacement based finite element method.
3.0 DIFFICULTIES IN IMPLEMENTATION OF Finite elements available for shell analysis can be broadly
ANALYTICAL SOLUTIONS: classified into the following groups:
Analytical solutions (rather analytical solutions backed by 1. Degenerated solid elements.
2. Elements based on basic shell mathematical model.
experimental findings like WRC 107/297 methods) are
3. Elements based on combination of plate and membrane
extremely useful in addressing stress analysis issues of pipe elements.
support attachments as they are available in almost all
commercial pipe stress codes and methods like “Kellogg For a detailed discussion on type-1, refer [19]. The main
feature of these elements is the number and variety of adhoc
method” can easily be developed into spreadsheets. The assumptions made to accommodate the standard procedures of
difficulty is of course the limited range of applicability of finite element formulation. The variation of strain through
these methods specially in relation to d ratio and for the thickness isn’t linear. Assumptions regarding dependence of
D determinant of Jacobian Matrix in the direction of thickness
Kellog method , its main drawback is its mathematical can lead to violation of rigid body properties [19].
oversimplification of a problem, an issue which is not Type-2 elements are usually not available in commercial
negligible when the predominant form of the loading is FE codes. They suffer from rigid body motion problems [18].
Radial. More advanced approaches as explained in section 2.3 The element S8R is ABAQUS is however close to these
elements as discussed in [18].
of this paper have solved the problem up to d =0.8, but To explain the meaning of the term Basic Shell Mathematical
D
these methods are yet not available in commercial pipe stress mode, we briefly describe the derivation of the governing shell
codes or as WRC bulletins and it will be a while before they equations using the tensor approach which involves the
will be available as handy tools for engineering applications. following steps [22]:
Such methods can be used to validate numerical analysis
7 Copyright © 2013 by ASME
Fundamental assumption of the shell theory based on Love-
STRI3 - Small Strain Triangular Element with 3 nodes and
Kirchoff hypothesis and zero strain in the through thickness quadratic variation of rotation (accurate representation of plate
direction. bending because of linear curvature variation) and analytical
Expressing the base vectors of a surface located “off middle implementation of Kirchoff constraint at locations (DKT or
surface” i.e. a general surface in terms of the base vectors of Discrete Kirchoff element).
the middle surface (both covariant and contra-variant STRI65 - Small Strain Triangular Element with 6 nodes and
versions). Kirchoff constraint imposed numerically at points.
• Expressing the metric tensor of a surface located “off
S8R- 8-node reduced integration element for small strain
middle surface” in terms of the metric tensor (both formulation. This element has similarity with the Basic Shell
covariant and contra-variant versions) of the middle mathematical model as described in [18], although they are
surface. not the same, the main difference being the use of Mindlin
• Expressing the rotation vector. hypothesis. This element is susceptible to element distortion.
• Expressing the Cristoffel symbols and permutation The Hexagonal element used is a 20-node reduced integration
tensors (Levi-Cevita tensors) of the surface located “off element. The method of analysis is Linear Elastic following
the middle surface” in terms of the corresponding tensors the Elastic Stress Classification Route of [28].
of the middle surface. The issue of classification of the FE computed stresses on
• Expressing the strain tensors of a surface located “off the lines of [28] has been dealt with in numerous papers and
middle surface” in terms of the strain tensor of the middle will not be repeated here. In a nutshell, local membrane
surface (both covariant and contra-variant versions). stresses are designated as Pl , primary + secondary stresses as
Strain tensors are expressed as the difference between Pl + Pb + Q and peak stresses as Pl + Pb + Q + F in line with
metric tensors and curvature tensors in the deformed and [28]. Primary stresses develop to maintain equilibrium with
un-deformed states external loads, secondary stresses to maintain compatibility of
deformation (global) and peak stresses to maintain
• Writing expression for stress and moment resultants.
compatibility of local deformation. Pl stands for local
• Using appropriate constitutive relations. primary stress, Pb for primary bending stress, Q for
In the Basic Shell Mathematical model version of Finite secondary stress and F for peak stress. Peak stresses are
Element implementation, the interpolation of the shell significant only from the standpoint of fatigue failure.
geometry is accomplished using the Iso-parametric procedure. FE convergence theorems are in L2 or H 1 norms which are
Covariant and Contra-variant base vectors of the interpolated difficult to implement when the exact solution is not shown
surface are computed using the usual finite element and in this presentation no attempt has been made to evaluate
interpolation procedures and the First Fundamental form, the the convergence using these norms. For checking the
Second Fundamental form and the Christoffel symbols are convergence of an FE model percentage change in stress is
then computed from these base vectors. In the Type-2 considered from a model with very fine mesh to gradually
elements as described in [18], the normal vector is calculated becoming cruder. Stresses are checked at Gauss points for
normal to the interpolated middle surface, although the normal accuracy and un-averaged. For convergence, monotonic
vectors at the nodal points are exactly normal to the middle behavior is checked with a maximum permissible variation in
surface. stress taken as 5%.The mesh size around the intersection is
For a discussion on type-3 elements any standard text
taken as 0.3 rt with progressive mesh grading away from it.
book on FEM can be referred [19].
For continuum four elements have been used through the
The FE code used for the analysis is ABAQUS ver. 6.9-1.
thickness at and close to intersections. The objective of the FE
The ABAQUS element library [20] for shells is divided into
analysis wasn’t to catch the peak stresses which are used for
three categories consisting of general-purpose, thin, and thick
shell elements. Thin shell elements provide solutions to shell fatigue evaluation, because once the Pl + Pb + Q stresses are
problems that are adequately described by classical computed, the fatigue stresses can easily be computed using
(Kirchhoff) shell theory; thick shell elements yield solutions Fatigue Strength Reduction Factors (FSRF) [28]. The results
for structures that are best modeled by shear flexible (Mindlin) of the analysis can then be extended to compute
shell theory; and general purpose shell elements can provide Pl + Pb + Q + F in a straightforward manner. [27] shows that
solutions to both thin and thick shell problems. All these modeling of welds to properly simulate joint stiffness does not
elements use bending strain measures that are approximations have serious impact on the computed stresses and hence,
of those of Koiter-Sanders version of shell theory [12]. welds are not part of the models. FSRF can be avoided if
For stress analysis, the following elements from Dong’s method [28] is used. However, this requires special
ABAQUS library have been used. post processing ability of the FE Code. If welds are modeled,
8 Copyright © 2013 by ASME
Pl + Pb + Q can be evaluated at the weld toe directly by (even Table-1 (Contd)
though it is a singularity) linearization at the stress Loading Type
Radial Longitudinal Circumferential
classification line (SCL) as explained by Kalnins [29]. The Force force force
only issue with this procedure is the through thickness stress FEA shell element
8 6 3
component. (STRI3) Cylinder
To avoid end effect, the location of the trunnion has been FEA shell element
13 4 5
taken as 5D [24] i.e. five times the Outside Diameter of the (STRI3) Trunnion
Header Pipe with respect to the end of the header. The worst FEA shell element
9 6 3
aspect ratio around the intersection (HEX elements) was 6.0, (STRI65) Cylinder
average aspect ratio 2.0. One end of the header was fixed in all FEA shell element
13 4 5
six DOFs and the other end is fixed in five DOF’s. The DOF (STRI65) Trunnion
along the longitudinal axis of the header was kept free to FEA continuum
9 5 3
generate longitudinal pressure stress (for models where element Cylinder
pressure was applied). Linear and full integration elements FEA continuum
12 3 6
were not selected in the quadrilateral and brick versions to element Trunnion
avoid shear locking. References [35, 24] provide excellent
guideline on modeling of Large Diameter Cylinder
intersections. Table-2
5.0 RESULTS 36 inch header, 30 inch trunnion, wall thickness = 9.52 mm for
both. Magnitude of Force = 10KN, length of trunnion = 100
The stresses shown in the tables below belong to the
mm, d = 0.84 , t = 1
Pb + Pl + Q category and are in N/mm2. Only maximum Von D T
Mises equivalent stress values are shown. For continuum Radial Longitudinal Circumferential
Loading Type
elements, stresses have been Linearized using [28] as a Force force force
guideline. For tables 1-5 the applied loadings are at the end of
WRC 107 Cylinder 45 2 12
the Trunnion which makes it a Shear Force + Bending
Moment at the Shell-Nozzle interface for the Longitudinal and
WRC 107 Trunnion NA NA NA
Circumferential Force applications.. Pressure is not a part of
the loadings in Tables 1-5. For WRC-107 and WRC-297
WRC 297 Cylinder 51 5 16
computations, code FE-107 has been used.
Table-1 WRC 297 Trunnion 56 4 16
30 inch header, 24 inch trunnion, wall thickness = 9.52 mm for Kellogg Cylinder 6 2 4
both. Magnitude of Force = 10KN, length of trunnion = 100
mm, d = 0.8 , t = 1 : Kellogg Trunnion 0.5 0.2 0.2
D T
Radial Longitudinal Circumferential FEA shell element
Loading Type 21 7 5
Force force force (S8R) Cylinder
FEA shell element
WRC 107 Cylinder 45 3 16 15 5 4
(S8R) Trunnion
FEA shell element
WRC 107 Trunnion NA NA NA 17 6 5
(STRI3) Cylinder
FEA shell element
WRC 297 Cylinder 50 6 22 11 4 3
(STRI3) Trunnion
FEA shell element
WRC 297 Trunnion 54 6 20 20 7 5
(STRI65) Cylinder
FEA shell element
Kellogg Cylinder 6 3 5 14 4 3
(STRI65) Trunnion
FEA continuum
Kellogg Trunnion 0.6 0.4 0.4 19 6 4
element Cylinder
FEA shell element FEA continuum
10 6 3 15 5 6
(S8R) Cylinder element Trunnion
FEA shell element
15 5 6
(S8R) Trunnion
9 Copyright © 2013 by ASME
Table 3 Table 4 (Contd.)
36 inch header, 12 inch trunnion, and wall thickness = 9.52 Radial Longitudinal Circumferential
Loading Type
Force force force
mm for header; and 6.35 mm for trunnion. Magnitude of Force
WRC 297
= 10KN, length of trunnion =100 mm, d = 0.34 , Trunnion
90 13 44
D
t = 0.67 : Kellogg Cylinder 7 4 3
T
Radial Longitudinal Circumferential Kellogg Trunnion 1 1 1
Loading Type
Force force force
FEA shell element
WRC 107 Cylinder 48 10 31 19 10 6
(S8R) Cylinder
FEA shell element
WRC 107 Trunnion NA NA NA 20 9 7
(S8R) Trunnion
FEA shell element
WRC 297 Cylinder 54 30 41 17 8 5
(STRI3) Cylinder
FEA shell element
WRC 297 Trunnion 103 30 75 19 7 6
(STRI3) Trunnion
FEA shell element
Kellogg Cylinder 15 11 22 19 10 6
(STRI65) Cylinder
FEA shell element
Kellogg Trunnion 2 2 2 20 7 7
(STRI65) Trunnion
FEA shell element FEA continuum
46 16 29 17 11 6
(S8R) Cylinder element Cylinder
FEA shell element FEA continuum
48 16 31 19 8 6
(S8R) Trunnion element Trunnion
FEA shell element
42 14 26
(STRI3) Cylinder
FEA shell element
43 15 27 Table 5
(STRI3) Trunnion
FEA shell element
24 inch header, 8 inch trunnion, and wall thickness = 9.52 mm
45 16 28 for header and 8.18 mm for trunnion. Magnitude of Force =
(STRI65) Cylinder
FEA shell element 10KN, length of trunnion = 100 mm, d = 0.36 , t = 0.86 :
(STRI65) Trunnion
47 15 30 D T
FEA continuum Radial Longitudinal Circumferential
44 13 27 Loading Type
element Cylinder Force force force
FEA continuum WRC 107 Cylinder 47 21 53
46 14 29
element Trunnion
WRC 107 Trunnion NA NA NA
Table 4 WRC 297 Cylinder 69 31 77
24 inch header, 20 inch trunnion, and wall thickness = 9.52 WRC 297 Trunnion 74 34 78
mm for header and 6.35 mm for trunnion. Magnitude of Force
= 10KN, length of trunnion = 100 mm, d = 0.84 , Kellogg Cylinder 16 20 40
D
t = 0.67 : Kellogg Trunnion 2 4 4
T
Radial Longitudinal Circumferential FEA shell element
Loading Type 48 26 46
Force force force (S8R) Cylinder
FEA shell element
WRC 107 Cylinder 44 5 20 43 21 43
(S8R) Trunnion
WRC 107 FEA shell element
NA NA NA 44 22 40
Trunnion (STRI3) Cylinder
FEA shell element
WRC 297 Cylinder 44 7 23 38 19 36
(STRI3) Trunnion
10 Copyright © 2013 by ASME
Table 5 (Contd) Table 6 (Contd)
24 inch header, 8 inch trunnion, and wall thickness = 9.52 mm
Torsional Moment
(Circumferential)
for header and 8.18 mm for trunnion. Magnitude of Force =
Circumferential
(Longitudinal)
Loading Type
Longitudinal
Radial Force
Shear Force
Shear Force
10KN, length of trunnion = 100 mm, d = 0.36 , t = 0.86 :
D T
moment
moment
Radial Longitudinal Circumferential
Loading Type
Force force force
FEA shell
FEA shell element element
44 22 40 47 6 10 20 106 361
(STRI65) Cylinder (STRI65)
Cylinder
FEA shell element
39 19 37 FEA shell
(STRI65) Trunnion
element
45 6 9 23 104 402
FEA continuum (STRI65)
46 24 44
element Cylinder Trunnion
FEA continuum FEA
41 19 43 continuum
element Trunnion 44 6 5 18 106 360
element
Cylinder
Table 6 is to reflect the effect of applying the Forces and FEA
moments at the Shell-Nozzle Interface as opposed to at the continuum
47 7 9 20 104 398
element
end of the Trunnion in Tables 1-5. Pressure is not a part of the Trunnion
Loading.
Table 6 For tables, 7-9, applied load in longitudinal, circumferential
36 inch header, 12 inch trunnion, wall thicknesses 9.52mm and radial directions = 10KN (applied together), pressure =
and 6.35mm for header and trunnion respectively. Loads 18.9Barg.
applied at shell nozzle interface, Moment=10KN-m and For the WRC-107 analysis, pressure loading has NOT been
Force=10KN. d = 0.34 , t = 0.67 added as a radial load at the trunnion attachment.
D T
Table 7
Torsional Moment
(Circumferential)
30 inch header, 24 inch trunnion, wall thickness =9.52 mm for
Circumferential
(Longitudinal)
Loading Type
both (results shown for maximum Pb + Pl + Q in MPa)
Longitudinal
Radial Force
Shear Force
Shear Force
moment
moment
WRC 107 Cylinder 258
WRC 107 Trunnion NA
WRC 107
48 4 4 13 99 310
Cylinder Kellogg Cylinder 87
WRC 107 Kellogg Trunnion 1
NA NA NA NA NA NA
Trunnion
FEA shell element (S8R) Cylinder 121
WRC 297
54 4 4 13 153 413 FEA shell element (S8R) Trunnion 63
Cylinder
WRC 297 FEA shell element (STRI3) Cylinder 120
103 6 6 19 295 752
Trunnion
FEA shell element (STRI3) Trunnion 59
FEA shell
FEA shell element (STRI65) Cylinder 125
element (S8R) 46 6 10 21 108 363
Cylinder FEA shell element (STRI65) Trunnion 66
FEA shell FEA continuum element (Shell) Cylinder 126
element (S8R) 48 7 9 23 105 401
Trunnion FEA continuum element Trunnion 70
FEA shell
element
46 6 9 21 106 359
(STRI3)
Cylinder
FEA shell
element
46 7 8 24 103 403
(STRI3)
Trunnion
11 Copyright © 2013 by ASME
Table 8
Table 10
36 inch header, 30 inch trunnion, wall thickness =9.52 mm for
36” pipe, wall thickness = 9.52 mm. Shoe design corresponds
both (results shown for maximum Pb + Pl + Q in MPa) to 3-gusset, A=450, B=500, shoe plate thickness = 10 mm, L =
WRC 107 Cylinder 307 350 mm (refer fig-1); magnitude of load = 40KN. Pressure is
WRC 107 Trunnion NA not applied. β1 = 0.56 , β 2 = 0.49
Kellogg Cylinder 100 Radial Longitudinal Circumferential
Loading Type
Force Force Force
Kellogg Trunnion 0.8
WRC 107 Cylinder 181 18 61
FEA shell element (S8R) Cylinder 146
Kellogg Cylinder 30 18 40
FEA shell element (S8R) Trunnion 75
Kellogg Shoe 2 9 3
FEA shell element (STRI3) Cylinder 143
FEA Shell element (S8R)
FEA shell element (STRI3) Trunnion 76 75 20 36
Cylinder
FEA shell element (STRI65) Cylinder 145 FEA Shell element (S8R) Shoe 77 30 32
FEA shell element (STRI65) Trunnion 76 FEA Shell element (STRI3)
82 18 35
Cylinder
FEA continuum element (Shell) Cylinder 148
FEA Shell element (STRI3)
FEA continuum element Trunnion 74 82 18 35
Shoe
FEA Shell element (STRI65)
Table 9 Cylinder
75 22 37
36 inch header, 12 inch trunnion, wall thickness = 9.52 mm for FEA Shell element (STRI65)
80 30 33
Shoe
header and 6.35 mm for Trunnion (results shown for
maximum Pb + Pl + Q in Mpa) FEA Continuum element
81 24 33
Cylinder
WRC 107 Cylinder 321 FEA Continuum element Shoe 78 35 32
WRC 107 Trunnion NA
Kellogg Cylinder 100 Table 11
Kellogg Trunnion 0.8 30” Pipe, wall thickness 9.52 mm, Shoe design corresponds to
FEA shell element (S8R) Cylinder 157 3 Gusset, A=450, B=500, Shoe plate thickness=10 mm, L=350
mm (refer fig-1), Magnitude of load=40KN. Pressure is not
FEA shell element (S8R) Trunnion 108
applied. β1 = 0.67 , β 2 = 0.60
FEA shell element (STRI3) Cylinder 155
Radial Longitudinal Circumferential
FEA shell element (STRI3) Trunnion 102 Loading Type
Force Force Force
FEA shell element (STRI65) Cylinder 159 WRC 107 Cylinder 173 21 63
FEA shell element (STRI65) Trunnion 98 Kellogg Cylinder 27 17 38
FEA continuum element (Shell) Cylinder 154 Kellogg Shoe 2 9 3
FEA continuum element Trunnion 103 FEA Shell element (S8R)
60 15 18
Cylinder
Results for Pipe Shoes: (Stresses at locations of FEA Shell element (S8R) Shoe 80 22 12
singularities have not been considered) FEA Shell element (STRI3)
62 14 18
Cylinder
Note: WRC-107 method has been used even though in most
cases β1 , β 2 are above the allowable limit. So far Pipe Shoes FEA Shell element (STRI3)
Shoe
75 22 13
are concerned, the typically used dimensions render them FEA Shell element (STRI65)
unsuitable for use of WRC-107. Despite this fact, the author in 60 14 20
Cylinder
his experience has seen its usage for computation of local FEA Shell element (STRI65)
stresses at Shoe Attachments and its use is mostly due to 82 22 14
Shoe
availability of this module in most common pipe stress FEA Continuum element
63 18 25
programmes. For the WRC 107 computation of Pipe Shoes, Cylinder
the geometry of the attachment has been considered as FEA Continuum element Shoe 82 20 16
Rectangular solid. Pipe Stress Program CAESAR II Version
5.2 has been used for this purpose. For Tables 10, 11 and 12,
2c1=500 mm and 2c2=450 mm.
12 Copyright © 2013 by ASME
Table 12 Table 14 (results shown for maximum Pb + Pl + Q in MPa)
24” pipe, wall thickness = 9.52 mm. Shoe design corresponds 30” header, wall thickness = 9.52 mm
to 3-gusset, A=450, B=500, shoe plate thickness = 10 mm, L =
WRC 107 Cylinder 312
350 mm (refer fig-1); magnitude of load = 40KN. Pressure is
not applied. β1 = 0.84 , β 2 = 0.75 WRC 107 Shoe NA
Kellogg Cylinder 161
Radial Longitudinal Circumferential
Loading Type
Force Force Force Kellogg Shoe 12
WRC 107 Cylinder 174 23 65 FEA shell element (S8R) Cylinder 126
Kellogg Cylinder 24 15 34 FEA shell element (S8R) Shoe 115
Kellogg Shoe 2 9 3 FEA shell element (STRI3) Cylinder 131
FEA Shell element (S8R) FEA shell element (STRI3) Shoe 118
35 12 22
Cylinder
FEA shell element (STRI65) Cylinder 128
FEA Shell element (S8R) Shoe 73 22 10
FEA shell element (STRI65) Shoe 113
FEA Shell element (STRI3)
34 12 22 FEA continuum element (Shell) Cylinder 132
Cylinder
FEA Shell element (STRI3) FEA continuum element Shoe 119
50 22 10
Shoe
FEA Shell element (STRI65)
35 13 22 Table 15 (results shown for maximum Pb + Pl + Q in MPa)
Cylinder
FEA Shell element (STRI65) 24” header, wall thickness = 9.52 mm
53 17 10
Shoe
WRC 107 Cylinder 298
FEA Continuum element
39 15 24 WRC 107 Shoe NA
Cylinder
FEA Continuum element Shoe 57 21 13 Kellogg Cylinder 136
Kellogg Shoe 12
For Tables 13-15, applied load in longitudinal, circumferential FEA shell element (S8R) Cylinder 80
and radial directions = 40KN( applied together), pressure =
FEA shell element (S8R) Shoe 85
18.9 barg. Pressure has been applied but not as radial thrust
load. FEA shell element (STRI3) Cylinder 84
FEA shell element (STRI3) Shoe 89
Table 13 (results shown for maximum Pb + Pl + Q in MPa)
FEA shell element (STRI65) Cylinder 82
36” header, wall thickness = 9.52 mm FEA shell element (STRI65) Shoe 83
WRC 107 Cylinder 330 FEA continuum element (Shell) Cylinder 88
WRC 107 Shoe NA FEA continuum element Shoe 92
Kellogg Cylinder 186
Kellogg Shoe 12
FEA shell element (S8R) Cylinder 180
FEA shell element (S8R) Shoe 155
FEA shell element (STRI3) Cylinder 184
FEA shell element (STRI3) Shoe 156
FEA shell element (STRI65) Cylinder 182
FEA shell element (STRI65) Shoe 153
FEA continuum element (Shell) Cylinder 188
FEA continuum element Shoe 159
13 Copyright © 2013 by ASME
6.0 DISCUSSION OF RESULTS AND SCOPE FOR the pipe shoe can be seen as analogous to this parameter.
FUTURE WORK Significant differences exist for the Circumferential loading
case also. For both Trunnion and Pipe Shoes, for some cases ,
Tables 1,2,4 show that WRC 107 and WRC 297 results
specially for the Radial Load scenario, stresses in the
show significant differences with respect to FE results for the
shoes/Trunnion elements exceed stresses in the cylinder
radial load case. This is because of the high d ratio and which clearly shows the risk of using the Kellogg method for
D
radial as opposed to vertical load representation of the same in computing stresses in the Pipe support attachments. A point to
WRC 107 as explained in section 2.2 of this paper. Tables 3, 5 note is that, the method of computing stresses in the Pipe
and 6 show that the results are comparable (even for the supports cannot be technically stated as “Kellogg Method” as
[4] only discusses computation of local stresses in the
Radial load case) indicating the criticality of the d factor in Cylinder. The context of using the term “ Kellogg method” for
D
WRC 107/297 approaches. For the Kellogg Method, the the method of computing stresses in attachments is due the
significant difference is for the radial load case. This is fact that this computation based on elementary beam theory is
because of the basis of the method being axi-symmetrical ring an essential feature ( in author’s experience) of the
loading which significantly deviates from the actual spreadsheets which use the Kellogg method to compute Local
mathematical model in the radial load situation. The Kellogg stresses in the Cylinder. Hence the caution is using elementary
method also underestimates the stresses in the Trunnion. This beam theory analysis for computation of local stresses in
is due to the use of simple beam theory as opposed to shell Attachments. Significant differences in results have not been
theory and the non-consideration of the compatibility seen in Finite element approach using different element types.
requirement between the header pipe and the Trunnion in this This however should not be taken as a blanket statement as the
method. Kellogg method also in most (but not all) cases models had proper mesh grading with adequately small
predicts lower magnitude of stresses in the Longitudinal and element size and the element distortion control was well
Circumferential Force applications. However the allowable within the recommended limits of the FE code. For improper
stresses in the Kellogg method as long as they are specified as mesh grading, element size, significantly distorted elements
the [28] allowable for local primary stress, the error will not in and improper integration methods, significant differences in
general make the analysis non-conservative except for the results can be seen between the elements, especially for
Radial Load scenario. For Tables 7, 8 and 9 which are for the Triangular elements which suffer from geometric anisotropy.
combined load scenario, WRC 107 results show significantly The stress analyst should carefully study the theory manual of
the FE code which he/she should be using with respect to
higher magnitudes of Pb + Pl + Q with respect to FEA. Even
applicability, element distortion and integration rules.
though the Pressure loading has not been modeled as a Radial
loading for these Tables, which would have resulted in even The present analysis has to be extended for different load
higher magnitudes of Pb + Pl + Q if the direction of this load combinations with varying magnitudes of the individual load
vectors to quantify the degree of over or under conservatism
would have been in the same direction as the additive radial
of the available analytical methods. The present analysis
load, but the simplistic way of computing pressure stresses
mainly focuses on the stand alone effect of individual load
also (as in Tables 7, 8 and 9) induces higher stresses in the
vectors (although Tables 7-9 as well as Tables 13-15 does
WRC 107 type of analysis. Pressure induced loading at a
address combinations but more tests need to be done with
cylinder to cylinder interface with or without other external
varying magnitudes of the individual load vectors) . Effect of
loadings is complicated and WRC 107 analysis which
variance in mesh grading and element size should be checked
considers the loading on the cylindrical surface as a
to assist an analyst in selection of the “best element” for these
rectangular loading cannot predict the stresses correctly and
applications, if an analyst so desires. In the present scope of
will err on the conservative side for most cases. WRC 107
work, the use of proper mesh grading, element size and
/297 analysis has shown lower magnitudes of Stress for Shear
integration rules have ironed out significant differences
Forces and Torsion moments (Table 6 where the loadings have
between the individual elements. Hence, the take away
been applied at the Shell-Nozzle Interface) with respect to
message for an analyst with respect to individual element
FEA. However, these loadings, in general are not the
types is, as long as mesh grading , element size, distortion
governing loads in piping applications. When using WRC-
control and integration rules are properly used, there are no
107/297 modules of a Pipe Stress Program, an analyst should
preferred elements , although the analyst should carefully read
review the program document to see how pressure is modeled
the Theory manual of the FE code which he/she intends to use.
in these modules.
7.0 CONCLUSIONS:
Results in tables 10, 11 and 12 again show that the pattern
of variance in results between FEA and WRC 107/297 is most 1. Use of a particular shell theory requires an understanding of
significant with respect to radial loads. The reason can still be the order of magnitude of error inherent in that theory and its
attributed to the d even though in case of the shoe
D
dimension “d” is strictly not applicable but the dimension of
14 Copyright © 2013 by ASME
applicability vis-à-vis the problem to be analyzed specially 107/297 based analysis is also not correct as the branch is not
with reference to d and D ratios. pressurized for Pipe support applications where by “branch”
D T we mean the Trunnion.
2. Shell theories should be evaluated on the basis of Sander- 8. Finite elements for shell analysis have different approaches
Koiter postulates. based on the theoretical considerations that form the basis of
3. The use of an axi-symmetric loading model (which in this their developments, with elements based on basic shell
paper has been referenced to as “Kellogg method”) has been mathematical model being least popular because of the
historically the most popular method for analyzing both problem of addressing rigid body motion. Commercial FE
cylindrical and non-cylindrical attachments. codes should be having Hybrid elements in the element library
for shell applications.
4. WRC-107 method which is based on Timoshenko equations
( )
9. Degenerated solid elements have used adhoc assumptions
has the same error O T as Morley, Simmonds and on shell theory to work within the constraint of finite element
R
Goldenveizer equations. WRC-107 results may be more or formulation. Assumptions regarding the mathematical form of
less conservative than FE results. Results are generally overly dependence of the determinant of the Jacobian Matrix on the
thickness direction coordinate can lead to violation of rigid
conservative for d > 0.5 . The analysis results show that in body properties.
D
some cases but not all (generally computation as per Kellogg
10. Not much difference has been found in results using 8-
method has shown lower magnitude of stresses with respect to
node reduced integration shell element developed on the line
WRC 107 or FE analysis), Kellogg method significantly
of Mindlin hypothesis, triangular elements based on discrete
underestimates the stresses in Trunnion and Pipe Shoes. Hence
Kirchoff constraints (imposed analytically or numerically) and
it is recommended that this method should not be used and
use of solid elements for circular attachments. Stresses at
hence should not be used for evaluating stresses in Pipe
locations of singularity have to be carefully addressed [29].
supports. A point to note is, the method as at appears in [4]
The pattern of results i.e. relative invariance with respect to
addresses only the local stresses at the cylinder, so the
element types need not be always correct depending on the
evaluation of stresses in attachments cannot technically be
addressed as “Kellogg method”, rather calculation based on D ratio, element distortion, element size and use of
T
elementary beam theory. It is against this later which, the alternate numerical integration rules. In general, as long as
author in his experience has seen as widely used in the thin shell theory is valid and reduced integration rule is used
Industry as part of the spreadsheets based on “Kellogg for shear flexible elements, with proper mesh grading and
method” is what this caution is directed at. keeping the element size at the intersection region
5. If an analyst is constrained to use Kellogg method for significantly less than rt , type of element is usually not a
analysis of local stresses on the pipe at support locations, the significant parameter. Stress Analyst should carefully review
allowable stress should not be exceeded beyond the allowable the Technical Manual(s) of FE Code for the capabilities and
for local primary stresses as per [28]. limitations of the available elements from the element library.
6. WRC-297 method is based on shallow shell theory and the
11. Analytical methods with d as high as 1.0 with ease of
order of magnitude in error is due to omission of some terms D
which are of the order O ( T R) and has shown overly
implementation is required not only because the available
methods like WRC107/297 etc are inadequate for such
conservative behavior, specially for the Trunnion stresses for applications but also as a tool to properly benchmark the FE
most of the cases analyzed. Use of WRC 297 for Pipe support results. Till such time, FE models will continue to be
attachments is not recommended. benchmarked against WRC 107 type of analysis for similar
loading within the limits of the applicable geometry.
7. When comparing results between an analytical and FE
approach, it is best to check the model on a component by 12. Additional tests need to be done for Pipe Shoes for varying
component basis i.e. the model is loaded with only one effects of D and combined loadings. In author’s opinion it
force/moment component in the absence of pressure. This T
check will show stresses because of which components are is futile to expect usability of WRC-107 for shoe attachments,
over/under represented in the final results. Since WRC- as based on typical dimensions of Pipe Shoes, these geometric
107/297 does not have a provision for checking pressure parameters will in most cases be not satisfied.
loading, simulating the same by a modified radial load (= 13. WRC 107 /297 analysis has shown lower magnitudes of
applied radial load + pressure times area) or superposing the Stress for Shear Forces and Torsion moments (Table 6 where
results with the usual membrane stresses in the header pipe the loadings have been applied at the Shell-Nozzle Interface)
due to pressure generally makes the analysis over- with respect to FEA. However, these loadings, in general are
conservative. The modification of the radial load in a WRC- not the governing factors in piping applications.
15 Copyright © 2013 by ASME
Shells Subjected to External Forces on Nozzle, ASME
Journal of Pressure Vessel Technology, Vol. 128.
ACKNOWLEDGMENTS
[17] Ming-De Xue, Qing-Hai Du, Keh-Chih Hwang, Zhi-
The author wishes to acknowledge Professor M.D.Xue of Hai Xiang, 2010, An analytical method for cylindrical
Tsinghua University, Department of Engineering Mechanics shells with nozzles due to internal pressure and external
for providing some valuable suggestions and document loads – Part I•Theoretical foundation; ASME Journal
references and for answering some questions on her paper. The of Pressure Vessel Technology Vol 132
author also wants to thank Dr.Subrata Saha of Reliance [18] Bathe, K.J.,Lee, P.S., 2005, Insight into finite element
Industries Ltd India, Mr. Suraj Kunder of Costain UK and ex- shell discretizations by use of the ‘‘basic shell
colleague and friend Mr.Arijit Chatterjee for providing mathematical model’’ Computers and Structures Vol. 83
valuable guideline and suggestions. [19] Mac Neal, R.H., Finite Elements their design and
performance, Marcel-Dekker, NY.
REFERENCES
[20] Theory Manual ABAQUS, a product of Dassault
[1] Timoshenko, S: 1940, Theory of plates and shells, MC- Systems, SA.
Graw Hill, New York [21] Mollman, M, 1981, Introduction to the Theory of Thin
[2] Bijlaard, P.P., 1955, “Stresses from Radial loads and Shells, Wiley-Blackwell.
External moments in Cylindrical pressure vessels”, [22] Flugge, W., Tensor analysis and Continuum Mechanics,
Welding Journal, Miami, FL, US Vol. 34 Springer, Berlin.
[3] Steele, C.R and Steele, M.L.M 1983, “Stress analysis of [23] Chen., M.W.L.Y., Li, J.G., 2000, A two step approach of
Nozzle in Cylindrical vessels with external Load, Stress Classification and Primary Structure Method.
ASME Journal of Pressure Vessel Technology, Vol. 105 Trans ASME Vol. 122
[4] M.W.Kellogg Company,2011,“Design of Piping [24] Xue,L.,Widera, G.E.O.,Sang, Zhifu., Feb. 2006,
Systems” Flexibility Factors for Branch Pipe Connections
[5] Mehrson, J.L, Mokhtarian, K., Ranjan, G.V and subjected to in-plane and out of plane moments ,Journal
Rodabaugh, E.C., 1984, “Local Stresses in Cylindrical of Pressure Vessel Technology
Shells due to External Loadings on Nozzle Supplement [25] Private communication, Professor M.D.Xue of
to WRC bulletin 107”WRC Bulletin No. 297 Tsinghua University, People’s Republic of China.
[6] Goldenveizer A.L., 1961, Theory of Elastic Thin shells, [26] Bhattacharya A, 2012, A Comparison of Simple
Pergamon, Oxford, Analytical Methods for evaluating local Stresses at Pipe
[7] Koiter, W.T, 1959. “A Consistent First Approximation Supports with Finite Element Analysis results
in the General Theory of Elastic Shells”, Proceedings of NAFEMS UK Conference 2012.
the Symposium on the Theory of Thin Elastic Shells, [27] Bhattacharya A, 2011, A Finite Element based Study on
Delft, the Netherlands, W.T.Koiter ed., North-Holland, Stress Intensification Factors (SIF) for reinforced
Amsterdam. Fabricated Tees NAFEMS World Congress Boston
[8] Donnell, L.H., 1933, “Stability of Thin Walled Tubes 2011
under Torsion”, NACA Report No. 479 [28] ASME Boiler and Pressure Vessel code, Sec VIII Div2
[9] Morley, L.S.D., 1959, “An Improvement on Donnell’s (2007 Edition), ASME Publication
Approximations for Thin walled Circular Cylinders”, [29] Kalnins, A, 2008, Stress Classification Lines Straight
Q.J.Mech., Appl. Math., Vol. 12 through Singularities ASME PVP Conference, Chicago,
[10] Donnell, L.H, 1976, Beams, Plates and Shells, Mc- ILL, USA
Graw -Hill, New York, Chapter 6 [30] Bathe, K.J., Chapelle, D., 2010, Finite Element
[11] Simmonds , J.G., 1966, A Set of Accurate Equations for Analysis of Shells Fundamentals, Springer.
Circular Cylindrical Elastic Shells, “,Int. J. Solids [31] Xue, M.D., Li, D.F., Hwang, K.C, 2005, A Thin Shell
Structure., Vol. 2, Theoretical Solution for Two Intersecting Cylindrical
[12] Budiansky,B and Sanders , J.L, 1963, “ On the best first Shells Due to External Branch Pipe Moments ASME
First Order Linear Shell Theory”, Progress in Applied Journal of PVT Vol. 127
Mechanics (The Prager Anniversary Volume), [32] Wong, F.M.G, 1984, Stresses and Flexibilities for
Macmillan, London. Pressure Vessel Attachments. Dissertation thesis for
[13] Flugge, W.1967, Stresses in Shells, Springer, Berlin. Master of Science in Nuclear Engineering.
[14] Hoff, N.J., 1955, The accuracy of Donnell’s equations [33] Morley, L.S.D, Morris, A.J.1978, Conflict between
J.Appl. Mech Vol. 22 Finite Elements and Shell Theory, Paper presented at
[15] Lekkerkerker, J.G., 1972. The Determination of Elastic Second World Congress on Finite Element Methods,
Stresses near Cylinder-to-Cylinder Intersection. Nuclear Bournemouth, UK.
Eng. Des., Volume 20. [34] Wichman, K.R., Hooper, A.G., Mehrson, J.L., Stresses
[16] Xue, M.D., Du, Q.H., Li, D.F. and Hwang, K.C., 2006. in Spherical Shells due to External Loadings, Welding
Theoretical Stress Analysis of Intersecting Cylindrical Research Council Bulletin No. 107.
16 Copyright © 2013 by ASME
[35] Koves, W., Mokhtarian, K., Rodabaugh, E., Widera, W.,
2006, Large Diameter Shell Intersections, Welding
Research Council Bulletin No. 497.
17 Copyright © 2013 by ASME
Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Plane Stress and Plane StrainDokument7 SeitenPlane Stress and Plane Strainحبيبة امهةNoch keine Bewertungen
- Unit - V: Mechanical Properties and Deformation MechanismsDokument94 SeitenUnit - V: Mechanical Properties and Deformation Mechanismssenthilkumar tsNoch keine Bewertungen
- Experimental Stress Analysis Using Moiré Fringes and Brittle Coatings (MEC-445Dokument18 SeitenExperimental Stress Analysis Using Moiré Fringes and Brittle Coatings (MEC-445Muhammed SulfeekNoch keine Bewertungen
- Mechanics of Materials: TorsionDokument25 SeitenMechanics of Materials: TorsionenochnancyNoch keine Bewertungen
- Engineering Fundamentals RefreshDokument9 SeitenEngineering Fundamentals RefreshA.K.M. MOBAROKNoch keine Bewertungen
- CE8395 Strength of Materials For Mechanical Engineers Questions and AnswersDokument49 SeitenCE8395 Strength of Materials For Mechanical Engineers Questions and Answersvijayan RNoch keine Bewertungen
- Stainless Steel Handrail Structural CalculationDokument31 SeitenStainless Steel Handrail Structural CalculationZaido Al Halabi100% (4)
- WeldDokument43 SeitenWeldAuggie AranzadoNoch keine Bewertungen
- M8 - Mechanical FailureDokument13 SeitenM8 - Mechanical FailureKeith Tanaka MagakaNoch keine Bewertungen
- UTM Test ProceduresDokument9 SeitenUTM Test ProceduresAira AngalaNoch keine Bewertungen
- Bollard Stress Analysis ReportDokument11 SeitenBollard Stress Analysis Reportejim2Noch keine Bewertungen
- Failure CriteriaDokument26 SeitenFailure CriteriaSagarias AlbusNoch keine Bewertungen
- FEM Model Question PaperDokument180 SeitenFEM Model Question PaperSayyed Ali Aaquib60% (5)
- 7 - MOS-I Assignment QuestionsDokument5 Seiten7 - MOS-I Assignment QuestionsSrikant Potluri100% (1)
- Load Bearing Capacity of Masonry Arch Bridges V Imp PrintedDokument8 SeitenLoad Bearing Capacity of Masonry Arch Bridges V Imp PrintedmagdyamdbNoch keine Bewertungen
- Cyclic Axial Behavior of Piles and Pile Groups in SandDokument14 SeitenCyclic Axial Behavior of Piles and Pile Groups in SandAnonymous v1blzDsEWANoch keine Bewertungen
- Critical Resolved Shear Stress - WikipediaDokument9 SeitenCritical Resolved Shear Stress - WikipediaRaman dhimanNoch keine Bewertungen
- StructuralMechanicsModuleUsersGuide PDFDokument1.160 SeitenStructuralMechanicsModuleUsersGuide PDFKamran PanaghiNoch keine Bewertungen
- Strength of Materials Concepts for Mechanical EngineeringDokument10 SeitenStrength of Materials Concepts for Mechanical Engineeringsmg26thmayNoch keine Bewertungen
- Calculo Amasadora de PanDokument14 SeitenCalculo Amasadora de PanUlises LaizaNoch keine Bewertungen
- LCF-HCF TutorialDokument85 SeitenLCF-HCF TutorialCarlos ToscanoNoch keine Bewertungen
- Strain, Force, and PressureDokument22 SeitenStrain, Force, and PressureOnur Deniz NarinNoch keine Bewertungen
- 13 Creep and Stress RuptureDokument25 Seiten13 Creep and Stress RuptureZdravko IvancicNoch keine Bewertungen
- Compression Behavior of Confined Concrete after Tensile LoadingDokument317 SeitenCompression Behavior of Confined Concrete after Tensile LoadingMihai GavrilescuNoch keine Bewertungen
- Ad20210607 Parking GuyanaDokument7 SeitenAd20210607 Parking GuyanaStephan CheongNoch keine Bewertungen
- (Gazetas and Dakoulas 1992) - Seismic Analysis and Design of Rockfill Dams - SOA PDFDokument35 Seiten(Gazetas and Dakoulas 1992) - Seismic Analysis and Design of Rockfill Dams - SOA PDFDaniel Felipe Ruiz RestrepoNoch keine Bewertungen
- A Geo-Engineering Classification For Rocks and Rock MassesDokument13 SeitenA Geo-Engineering Classification For Rocks and Rock MassesAzeNoch keine Bewertungen
- Design of PCC Abutment - Open FoundationDokument21 SeitenDesign of PCC Abutment - Open Foundationklynchelle89% (9)
- Hassaneinn (2012) - Lateral-Torsional Buckling of Hollow Tubular FlangeplategirdersDokument13 SeitenHassaneinn (2012) - Lateral-Torsional Buckling of Hollow Tubular FlangeplategirdersGogyNoch keine Bewertungen
- Lecture 3 Properties of MaterialsDokument57 SeitenLecture 3 Properties of MaterialsRoy MarechaNoch keine Bewertungen