Das könnte Ihnen auch gefallen
- Manual de taller del sistema de control del motor 4JJ1Dokument316 SeitenManual de taller del sistema de control del motor 4JJ1INGENIERÍA TOTAL Entrenamiento y Diagnostico88% (25)
- Manual de taller del sistema de control del motor 4JJ1Dokument316 SeitenManual de taller del sistema de control del motor 4JJ1Dagar GR91% (34)
- Cálculo de Bobinado de Motores de Corriente AlternaDokument45 SeitenCálculo de Bobinado de Motores de Corriente AlternaJosé Antonio Curado Escoz87% (55)
- Manual 3520 Comancenter PDFDokument954 SeitenManual 3520 Comancenter PDFSammy Polanco100% (4)
- Caja Automatica Santa Fe 20012Dokument76 SeitenCaja Automatica Santa Fe 20012Jose Guillen100% (1)
- Overwiev Accionamientos Gearless SiemensDokument62 SeitenOverwiev Accionamientos Gearless Siemensalphasound0% (2)
- gearless-motors-overviewDokument62 Seitengearless-motors-overviewMiguel100% (4)
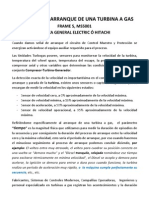
- Turbinas A GAS - Secuencia de ArranqueDokument5 SeitenTurbinas A GAS - Secuencia de ArranqueMasterGcastro75% (4)
- Cat 400kva 3406Dokument10 SeitenCat 400kva 3406Martin Flores100% (1)
- Caja ZFDokument47 SeitenCaja ZFAyrton Esteban100% (4)
- Temario Carnet ConducirDokument112 SeitenTemario Carnet ConducirAngel Martin Ventura67% (3)
- Kleer Scrum Estimation Planning Es PDFDokument61 SeitenKleer Scrum Estimation Planning Es PDFRubenDCamataLlaveraNoch keine Bewertungen
- DTC P0045 34 Turbocompresor Sobrealimentador Circuito de Solenoide de Control de TurboDokument4 SeitenDTC P0045 34 Turbocompresor Sobrealimentador Circuito de Solenoide de Control de TurboDaniel rodriguez alayo100% (1)
- Manual TP 102Dokument26 SeitenManual TP 102MonicaFlores100% (1)
- Capitulo 14. - Diseño de Circuitos Electroneumaticos 2Dokument14 SeitenCapitulo 14. - Diseño de Circuitos Electroneumaticos 2Henrry Lion BaptistaNoch keine Bewertungen
- Trabajos por día CP4_REV 0-2Dokument1 SeiteTrabajos por día CP4_REV 0-2Felipe Vasquez MedinaNoch keine Bewertungen
- El Coche Le Cuesta Moverse y Se Calienta El AceiteDokument2 SeitenEl Coche Le Cuesta Moverse y Se Calienta El AceiteMario MastronardiNoch keine Bewertungen
- Cliente - Instrucciones de Uso Girador Con Escuadrador Nº24Dokument6 SeitenCliente - Instrucciones de Uso Girador Con Escuadrador Nº24lrulNoch keine Bewertungen
- 01 - 4 - Controles de La MaquinaDokument35 Seiten01 - 4 - Controles de La MaquinaNelson GonzalezNoch keine Bewertungen
- Informe Compuertas LogicasDokument9 SeitenInforme Compuertas LogicasarnoldtoniNoch keine Bewertungen
- ji600manDokument6 Seitenji600manfabrizabalaNoch keine Bewertungen
- Control de Una Maquina Dobladora de LaminasDokument7 SeitenControl de Una Maquina Dobladora de LaminasJhon RíosNoch keine Bewertungen
- Programas de Mantenimiento - Área de Post-Hilandería - Planta 2Dokument735 SeitenProgramas de Mantenimiento - Área de Post-Hilandería - Planta 2Gerardo Jose Ulloa DiazNoch keine Bewertungen
- DocTec FK Accesorios PT100Dokument2 SeitenDocTec FK Accesorios PT100Guille AvilezNoch keine Bewertungen
- PDM1 SPDokument8 SeitenPDM1 SPAquilino Sanchez FosadoNoch keine Bewertungen
- Lab Sistema de MandosDokument17 SeitenLab Sistema de MandosCesar Anthony Gutierrez MamaniNoch keine Bewertungen
- Codificación e Inventario Gestión de Sistemas de Mantenimiento - Mario Silverio 1089053Dokument10 SeitenCodificación e Inventario Gestión de Sistemas de Mantenimiento - Mario Silverio 1089053SkidmosNoch keine Bewertungen
- PLC LAB4Dokument11 SeitenPLC LAB4alexxNoch keine Bewertungen
- 1.HA16-20 RTJ EspañolDokument56 Seiten1.HA16-20 RTJ EspañolCamiLo MoceTonNoch keine Bewertungen
- Presentacion PDFDokument83 SeitenPresentacion PDFRusber Michel Llama FloresNoch keine Bewertungen
- DTC P0488/15 Margen/Rendimiento Del Control de Posición de La Mariposa Del Sistema de Recirculación de Gases de EscapeDokument5 SeitenDTC P0488/15 Margen/Rendimiento Del Control de Posición de La Mariposa Del Sistema de Recirculación de Gases de EscapeficoschaNoch keine Bewertungen
- sistema de control de transmision cargador 928G_110650Dokument6 Seitensistema de control de transmision cargador 928G_110650David's Andrews Fuentes FandiñoNoch keine Bewertungen
- Escuela de Operadores R1600H 2021Dokument124 SeitenEscuela de Operadores R1600H 2021Elvis Yauri AlvaroNoch keine Bewertungen
- 04. Operaciones de TiempoDokument3 Seiten04. Operaciones de TiempoalexmartinezpedrosaNoch keine Bewertungen
- A750E en EsDokument41 SeitenA750E en Eswilson polancoNoch keine Bewertungen
- Manual Calentador de Rodamientos TIH-060Dokument10 SeitenManual Calentador de Rodamientos TIH-060cuzquillo0% (1)
- Puesta en Marcha Mediante InterruptorDokument30 SeitenPuesta en Marcha Mediante Interruptorjuan davidNoch keine Bewertungen
- Frenado de motor asíncrono 3F por inyección DCDokument11 SeitenFrenado de motor asíncrono 3F por inyección DCYeffersom EscobedoNoch keine Bewertungen
- MN 1402Dokument7 SeitenMN 1402JonhNoch keine Bewertungen
- KM-29 Microondas VELOZ (Español)Dokument96 SeitenKM-29 Microondas VELOZ (Español)Cesar Calderon GrNoch keine Bewertungen
- Procedimiento Toyot EsDokument30 SeitenProcedimiento Toyot EsFrancisco MoraNoch keine Bewertungen
- Sis 2.0Dokument5 SeitenSis 2.0Leonardo Andres Soto PerezNoch keine Bewertungen
- Puertas batientes A45MDokument18 SeitenPuertas batientes A45MJavier NBNoch keine Bewertungen
- Partes de Servicio Temas: Intercambiador de Calor MarinoDokument10 SeitenPartes de Servicio Temas: Intercambiador de Calor Marinosebastian blancoNoch keine Bewertungen
- Secuencia de Arranque y Fallas Quemador Dual Caliza CTA-CTH 2019-10-02 Rev.002Dokument6 SeitenSecuencia de Arranque y Fallas Quemador Dual Caliza CTA-CTH 2019-10-02 Rev.002Marcos Avendaño CarvajalNoch keine Bewertungen
- Automatismo Secuencial Con Bobinas TemporizadasDokument8 SeitenAutomatismo Secuencial Con Bobinas TemporizadasCamilo Salamanca CobosNoch keine Bewertungen
- AAP2 EspañolDokument90 SeitenAAP2 Españolfede_fab2009Noch keine Bewertungen
- SK-60 Motor Repuestos CatálogoDokument129 SeitenSK-60 Motor Repuestos CatálogoDouglas MoranteNoch keine Bewertungen
- Practica SSW05Dokument32 SeitenPractica SSW05lghilardi79Noch keine Bewertungen
- Descripción Del Microcontrolador 8051: Asignatura: Microprocesadores Prof.: Juan Antonio Hernández TamamesDokument9 SeitenDescripción Del Microcontrolador 8051: Asignatura: Microprocesadores Prof.: Juan Antonio Hernández TamamesJosé ValdezNoch keine Bewertungen
- Relief Valve (Torque Converter Outlet) Pressure - Test and Adjust.en.esDokument5 SeitenRelief Valve (Torque Converter Outlet) Pressure - Test and Adjust.en.eshectorchacon2817Noch keine Bewertungen
- Planificación de Puesta en Marcha Estación MPS DISTRIBUCIÓNDokument9 SeitenPlanificación de Puesta en Marcha Estación MPS DISTRIBUCIÓNAbraham Fuentes MedinaNoch keine Bewertungen
- PM HR CDG Robotica ActualDokument86 SeitenPM HR CDG Robotica ActualYordiUlisesOrtegaNoch keine Bewertungen
- Variacionvelocidad - Arranque - Telemecanique - EspañolDokument89 SeitenVariacionvelocidad - Arranque - Telemecanique - EspañolAntonio OteroNoch keine Bewertungen
- JS200 Smart Control1Dokument287 SeitenJS200 Smart Control1Mantenimiento Mecanico BiddleNoch keine Bewertungen
- Taller 04 - ZapanaYanaJaraDokument11 SeitenTaller 04 - ZapanaYanaJaraSofiaNoch keine Bewertungen
- Infome Taller Intragracion Tecnica ESTADO OPERACIONAL DE UNA MAQUINADokument10 SeitenInfome Taller Intragracion Tecnica ESTADO OPERACIONAL DE UNA MAQUINABenjamín Veliz MolinaNoch keine Bewertungen
- Ttzmc067-Procedimiento Desmontaje Del Rotor de La TurbinaDokument6 SeitenTtzmc067-Procedimiento Desmontaje Del Rotor de La TurbinaSelene Julio CastillaNoch keine Bewertungen
- Overhaul Aconcagua FoodsDokument9 SeitenOverhaul Aconcagua FoodsbenjaminNoch keine Bewertungen
- Ar-Ssp-006 Meia-Dos - CilindrosDokument6 SeitenAr-Ssp-006 Meia-Dos - CilindrosderickipondongNoch keine Bewertungen
- Diagrama ElectricoDokument44 SeitenDiagrama ElectricoFranko Salas75% (4)
- P0713 EspDokument5 SeitenP0713 EspJosé Garcia.Noch keine Bewertungen
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209Von EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Bewertung: 1 von 5 Sternen1/5 (2)
- Guia de Interpretacion NRZ103 EP Instalaciones Privadas Consumidores BT - v2 PDFDokument62 SeitenGuia de Interpretacion NRZ103 EP Instalaciones Privadas Consumidores BT - v2 PDFpepe89Noch keine Bewertungen
- Ejercicio de RepasoDokument8 SeitenEjercicio de RepasoDaniel ElpaloNoch keine Bewertungen
- Curso Instalador Electricista Ceac 8 PDFDokument130 SeitenCurso Instalador Electricista Ceac 8 PDFJorge Marrero DiazNoch keine Bewertungen
- Bobinados 110810102052 Phpapp02Dokument20 SeitenBobinados 110810102052 Phpapp02Heber Garcia VazquezNoch keine Bewertungen
- Manual Moeller interruptoresDokument18 SeitenManual Moeller interruptoresjgutierrezpepeNoch keine Bewertungen
- Form PotDokument1 SeiteForm PotOdin Sangre de CromNoch keine Bewertungen
- TablasDokument2 SeitenTablasDaniel ElpaloNoch keine Bewertungen
- AADokument4 SeitenAADaniel ElpaloNoch keine Bewertungen
- Cálculo de secciones conductores eléctricosDokument4 SeitenCálculo de secciones conductores eléctricoscasa_periNoch keine Bewertungen
- Breve Guia ATEXDokument35 SeitenBreve Guia ATEXWilmer SusanoNoch keine Bewertungen
- Programación y RobóticaDokument28 SeitenProgramación y RobóticaDaniel ElpaloNoch keine Bewertungen
- Cómo Apagar Un Incendio EléctricoDokument2 SeitenCómo Apagar Un Incendio EléctricoDaniel ElpaloNoch keine Bewertungen
- Metodos de Frenado en Motores AsincronosDokument16 SeitenMetodos de Frenado en Motores AsincronosJon BrownNoch keine Bewertungen
- Conoce Ventajas Estudiar FPDokument3 SeitenConoce Ventajas Estudiar FPDaniel ElpaloNoch keine Bewertungen
- 16 Efectos de Los Armónicos Que DesconocíasDokument1 Seite16 Efectos de Los Armónicos Que DesconocíasDaniel ElpaloNoch keine Bewertungen
- Una FP Contemporánea Del FuturoDokument2 SeitenUna FP Contemporánea Del FuturoDaniel ElpaloNoch keine Bewertungen
- U01 Pda 001Dokument5 SeitenU01 Pda 001Daniel ElpaloNoch keine Bewertungen
- U01 Pda 001Dokument5 SeitenU01 Pda 001Daniel ElpaloNoch keine Bewertungen
- Sietec Mot Tran PLC NeuDokument217 SeitenSietec Mot Tran PLC NeuDaniel ElpaloNoch keine Bewertungen
- GRAFCET CINTA T para Tapadera 14 05 2109 Ver 05Dokument91 SeitenGRAFCET CINTA T para Tapadera 14 05 2109 Ver 05Daniel ElpaloNoch keine Bewertungen
- BOE-A-2014-11637 Nuevo Recibo de NóminaDokument4 SeitenBOE-A-2014-11637 Nuevo Recibo de NóminaAntonio López GómezNoch keine Bewertungen
- RUBRICA TecnologiaIndustrial 1Dokument55 SeitenRUBRICA TecnologiaIndustrial 1Daniel ElpaloNoch keine Bewertungen
- Epson 378549 EuDokument220 SeitenEpson 378549 EuiamsuscripcionNoch keine Bewertungen
- Planta FotovoltaicaDokument2 SeitenPlanta FotovoltaicaDaniel ElpaloNoch keine Bewertungen
- Guiazonas ATEXDokument118 SeitenGuiazonas ATEXCarlos GPNoch keine Bewertungen
- ANEXO - II. Adaptaciones DenegadasDokument2 SeitenANEXO - II. Adaptaciones DenegadasDaniel ElpaloNoch keine Bewertungen
- Borrador Temario Mesa Sectorial de 23-11-2017. FP - Instalaciones ElectrotécnicasDokument3 SeitenBorrador Temario Mesa Sectorial de 23-11-2017. FP - Instalaciones ElectrotécnicasDaniel ElpaloNoch keine Bewertungen
- Curso Multimedia Interactivo ElectromagnetismoDokument6 SeitenCurso Multimedia Interactivo ElectromagnetismoDaniel ElpaloNoch keine Bewertungen
- Anexo V Motivos ExclDokument4 SeitenAnexo V Motivos ExclDaniel ElpaloNoch keine Bewertungen
- F-27-CC-43-SC Lista de Verificacion de Inspección Periódica de GrúasDokument1 SeiteF-27-CC-43-SC Lista de Verificacion de Inspección Periódica de GrúasLuis Fernando Concha FigueroaNoch keine Bewertungen
- Método CJ ZJDokument7 SeitenMétodo CJ ZJJohan Rolando TomaláNoch keine Bewertungen
- Fundaciones de EdificiosDokument22 SeitenFundaciones de EdificiosAndres Mauricio Reyes Carrasco50% (2)
- Norma de Cables y ToronesDokument68 SeitenNorma de Cables y ToronesForos IscNoch keine Bewertungen
- Practica 1Dokument7 SeitenPractica 1Luis PeñaNoch keine Bewertungen
- Mi5082 PDFDokument6 SeitenMi5082 PDFDavid Esteban Meneses RendicNoch keine Bewertungen
- Uptjaa Manual Psit 2015Dokument86 SeitenUptjaa Manual Psit 2015Carlena AstudilloNoch keine Bewertungen
- Mapas Mentales Lean ManufacturingDokument12 SeitenMapas Mentales Lean ManufacturingIVÁN RASTANoch keine Bewertungen
- Informacion y Estructura Enka de ColombiaDokument4 SeitenInformacion y Estructura Enka de ColombiaEstefanía SerendipiaNoch keine Bewertungen
- Diseño de Caja ReductoraDokument35 SeitenDiseño de Caja Reductorajavier borjaNoch keine Bewertungen
- Lmma - U1 - A2 - JorcDokument6 SeitenLmma - U1 - A2 - JorcPepe ToñoNoch keine Bewertungen
- Cadena de Suministros - Unidad 5 - 5.2.1 de ComprasDokument9 SeitenCadena de Suministros - Unidad 5 - 5.2.1 de ComprasKarla Sosa0% (1)
- Basf MasterPolyheed 789 Tds SPDokument3 SeitenBasf MasterPolyheed 789 Tds SPVictor GalvezNoch keine Bewertungen
- Amplificador Seguridad Intrínseca IIDokument4 SeitenAmplificador Seguridad Intrínseca IIVicente ManuelNoch keine Bewertungen
- Excavacion de Plintos y CimientosDokument18 SeitenExcavacion de Plintos y CimientosKeicoHetfieldNoch keine Bewertungen
- Perfiles U Acindar UPN: Características y especificaciones técnicasDokument2 SeitenPerfiles U Acindar UPN: Características y especificaciones técnicasMicaa IssaNoch keine Bewertungen
- Libro ExcelDokument22 SeitenLibro ExcelsamuelNoch keine Bewertungen
- Manual de montaje de estructuras metálicas para edificios de 70m2Dokument16 SeitenManual de montaje de estructuras metálicas para edificios de 70m2Rafael RodriguezNoch keine Bewertungen
- Almacenaje Entorno OperativoDokument12 SeitenAlmacenaje Entorno OperativoJOSE LUIS WILLIAMS CRUZNoch keine Bewertungen
- IV Especialista BIM La Ruta Sesion 02Dokument78 SeitenIV Especialista BIM La Ruta Sesion 02Kelly MontufarNoch keine Bewertungen
- Trabajo Final Baterías Willard PDFDokument79 SeitenTrabajo Final Baterías Willard PDFProjects100% (2)
- Proyecto de Raul (Autoguardado)Dokument16 SeitenProyecto de Raul (Autoguardado)raul rocha mejiaNoch keine Bewertungen
- Calidad y Mejora ContinuaDokument10 SeitenCalidad y Mejora ContinuaJose LupacaNoch keine Bewertungen
- Qué es ETL: Extraer, Transformar, Cargar datosDokument3 SeitenQué es ETL: Extraer, Transformar, Cargar datosJose Luis Florez CastroNoch keine Bewertungen
- Informe Mensual DpaiDokument6 SeitenInforme Mensual DpaiWilson BravoNoch keine Bewertungen
- Proceso Constructivo de Una Losa Industrial de Concreto PDFDokument255 SeitenProceso Constructivo de Una Losa Industrial de Concreto PDFChristian Ibañez100% (1)
- Reglas de Seguridad en Uso de Aire ComprimidoDokument2 SeitenReglas de Seguridad en Uso de Aire ComprimidotogalopzNoch keine Bewertungen
- Factores de Calidad Del SoftwareDokument22 SeitenFactores de Calidad Del SoftwareCristian CortesNoch keine Bewertungen