Das könnte Ihnen auch gefallen
- Module 5: Oscillator With External forcing-II Lecture 5: Oscillator With External forcing-IIDokument7 SeitenModule 5: Oscillator With External forcing-II Lecture 5: Oscillator With External forcing-IIMahendra PanwarNoch keine Bewertungen
- AC CircuitsDokument18 SeitenAC CircuitsMARIAMA SILLAHNoch keine Bewertungen
- MIT 6.685 Electric Machines Problem Set 11 SolutionsDokument19 SeitenMIT 6.685 Electric Machines Problem Set 11 Solutionsflywheel2006Noch keine Bewertungen
- Analysis of SDOF Systems Frequency ResponseDokument27 SeitenAnalysis of SDOF Systems Frequency ResponseFaiz MalikNoch keine Bewertungen
- Solution Set 1Dokument14 SeitenSolution Set 1BAKRNoch keine Bewertungen
- Solution: WL WL WLDokument6 SeitenSolution: WL WL WLJohn Resty RamosNoch keine Bewertungen
- Formula Sheet ExamDokument4 SeitenFormula Sheet ExamhenryNoch keine Bewertungen
- ForcedDokument2 SeitenForcedChristopher J CampbellNoch keine Bewertungen
- Optics_Tutorial_2_SolutionsDokument2 SeitenOptics_Tutorial_2_SolutionsKhushi AgrawalNoch keine Bewertungen
- Full Download Modern Control Systems 13th Edition Dorf Solutions Manual PDF Full ChapterDokument36 SeitenFull Download Modern Control Systems 13th Edition Dorf Solutions Manual PDF Full Chapterviviankellerbv5yy8100% (14)
- Chapter 05Dokument25 SeitenChapter 05Pratham sehgalNoch keine Bewertungen
- F 06 ZtransfDokument6 SeitenF 06 ZtransfNawal LubbadNoch keine Bewertungen
- Em 18 Equilibrium of A ParticleDokument2 SeitenEm 18 Equilibrium of A ParticleFattihi EkhmalNoch keine Bewertungen
- Answer THREE QuestionsDokument6 SeitenAnswer THREE QuestionsRoy VeseyNoch keine Bewertungen
- TFY4305 Solutions Exercise Set 7 2014: Problem 5.2.12Dokument3 SeitenTFY4305 Solutions Exercise Set 7 2014: Problem 5.2.12AaaereNoch keine Bewertungen
- Lecture3 ConvexSetsFuns PDFDokument43 SeitenLecture3 ConvexSetsFuns PDFIbrahim Saiful MillahNoch keine Bewertungen
- Definition of The Trig FunctionsDokument2 SeitenDefinition of The Trig FunctionsJulie OcolNoch keine Bewertungen
- Plantilla Zapata CombinadaDokument30 SeitenPlantilla Zapata CombinadaJosè Alexander Linares HerreraNoch keine Bewertungen
- Classification of Partial Classification of Partial Differential Differential Equations Equations.Dokument8 SeitenClassification of Partial Classification of Partial Differential Differential Equations Equations.Topan SetiadipuraNoch keine Bewertungen
- Assignment CT FT SolutionsDokument7 SeitenAssignment CT FT SolutionsnikunjNoch keine Bewertungen
- Chapter2 FourierAnalysis 1Dokument24 SeitenChapter2 FourierAnalysis 1Geede AlfonsoNoch keine Bewertungen
- Lecture 5 - A Particle in A BoxDokument8 SeitenLecture 5 - A Particle in A BoxMartin MaguNoch keine Bewertungen
- Lecture 6 SD Single Degree of Freedom (SDOF) System (5) Harmonic Loading (Damped)Dokument17 SeitenLecture 6 SD Single Degree of Freedom (SDOF) System (5) Harmonic Loading (Damped)Sarose PrajapatiNoch keine Bewertungen
- Mathcad 10 Design of Singly Reinforced Beams 1Dokument11 SeitenMathcad 10 Design of Singly Reinforced Beams 1bsce.delossantos.rizza.mNoch keine Bewertungen
- Harmonic Motion Amplification Factor For ExcitationDokument25 SeitenHarmonic Motion Amplification Factor For ExcitationSiamNoch keine Bewertungen
- Formula Sheet 1Dokument5 SeitenFormula Sheet 1Ghender TapecNoch keine Bewertungen
- Applications of Eigenvalues & Eigenvectors in EngineeringDokument16 SeitenApplications of Eigenvalues & Eigenvectors in EngineeringLiaquat Ali PanhwerNoch keine Bewertungen
- AlfvenDokument13 SeitenAlfvenyemmanurvishnuNoch keine Bewertungen
- PHY3512 Tut7 SolutionsDokument4 SeitenPHY3512 Tut7 SolutionsFeel-more HekandjoNoch keine Bewertungen
- Semibatch KRD LabDokument7 SeitenSemibatch KRD LabPritiNoch keine Bewertungen
- ECSE 403 Midterm NotesDokument1 SeiteECSE 403 Midterm Notesddd ddNoch keine Bewertungen
- R10 Notes PDFDokument6 SeitenR10 Notes PDFSumanta DuttaNoch keine Bewertungen
- Relativistic Quantum Mechanics: Exercises: Preprint Typeset in JHEP Style - HYPER VERSIONDokument6 SeitenRelativistic Quantum Mechanics: Exercises: Preprint Typeset in JHEP Style - HYPER VERSIONMahendra SankhuaNoch keine Bewertungen
- TTK4115 SummaryDokument5 SeitenTTK4115 SummaryManoj GuptaNoch keine Bewertungen
- Tut 6 Ideal and Nonideal Solutions - SolutionsDokument19 SeitenTut 6 Ideal and Nonideal Solutions - SolutionsAsma NasserNoch keine Bewertungen
- Asentamiento 1Dokument93 SeitenAsentamiento 1NURIA YULIYA DIAZ VELARDENoch keine Bewertungen
- Problems Full Merge PDFDokument22 SeitenProblems Full Merge PDFBourne JasonNoch keine Bewertungen
- NEET MADE EJEE Complete Handwritten Formulae Chemistry NEET andDokument90 SeitenNEET MADE EJEE Complete Handwritten Formulae Chemistry NEET andliyanderNoch keine Bewertungen
- Chino Poisson 1dDokument8 SeitenChino Poisson 1dLeonel MoralesNoch keine Bewertungen
- Madsen Transport Boltztrap PDFDokument38 SeitenMadsen Transport Boltztrap PDFANDREANoch keine Bewertungen
- AC Circuit Ch 31: Resistors, Inductors, Capacitors & RMSDokument88 SeitenAC Circuit Ch 31: Resistors, Inductors, Capacitors & RMSsygwapoooNoch keine Bewertungen
- Plenary Paper No 2 - KC TsaiDokument67 SeitenPlenary Paper No 2 - KC TsaikrtNoch keine Bewertungen
- Ical UtsDokument2 SeitenIcal UtsrianNoch keine Bewertungen
- Lab 4 forced vibration experimentDokument6 SeitenLab 4 forced vibration experimentMohd Khairul FahmiNoch keine Bewertungen
- Problem 1 solutions and marking schemeDokument12 SeitenProblem 1 solutions and marking schemePriya TalrejaNoch keine Bewertungen
- Interplay Between Theory and Experimentin AFM Nanomechanical Studies of PolymersDokument29 SeitenInterplay Between Theory and Experimentin AFM Nanomechanical Studies of PolymersLIAKMANNoch keine Bewertungen
- Duality in power-law localization: Supplemental Material on localization propertiesDokument4 SeitenDuality in power-law localization: Supplemental Material on localization propertiesdavid perezNoch keine Bewertungen
- Coupled Oscillator Normal ModesDokument8 SeitenCoupled Oscillator Normal ModesAbhinav SrivastavaNoch keine Bewertungen
- CQF Module 2 Examination: InstructionsDokument3 SeitenCQF Module 2 Examination: InstructionsPrathameshSagareNoch keine Bewertungen
- DX DT 1 2 10: OscillationsDokument60 SeitenDX DT 1 2 10: Oscillationswentuphill0Noch keine Bewertungen
- Sinusoidal Steady-State Analysis Phasors and ImpedanceDokument6 SeitenSinusoidal Steady-State Analysis Phasors and ImpedanceJoshua SambalodNoch keine Bewertungen
- Long Straight Wire: E E A EDokument4 SeitenLong Straight Wire: E E A EMomoHinamoriChanNoch keine Bewertungen
- Einweg 03Dokument1 SeiteEinweg 03Dieter BaldaufNoch keine Bewertungen
- Chapter 3. Single-Transistor Primitives: Analog IC DesignDokument26 SeitenChapter 3. Single-Transistor Primitives: Analog IC DesignMEGA_ONENoch keine Bewertungen
- Uts TermodinamikaDokument13 SeitenUts TermodinamikaBra Sello RMNoch keine Bewertungen
- Balancing SolutionsDokument1 SeiteBalancing Solutionsraghu.entrepreneurNoch keine Bewertungen
- Math 3220-1 HW1: Exercises For Section 1.1: Norm and Inner ProductDokument3 SeitenMath 3220-1 HW1: Exercises For Section 1.1: Norm and Inner ProductLuis Esteban Zúñiga RossiNoch keine Bewertungen
- Modulo IIIDokument8 SeitenModulo IIIjose antonio manchaNoch keine Bewertungen
- 02.what Bode Plots Represent - The Frequency DomainDokument6 Seiten02.what Bode Plots Represent - The Frequency DomainYang CaoNoch keine Bewertungen
- El 104 Roof Floor PlanDokument1 SeiteEl 104 Roof Floor Plankhawaldeh jamalNoch keine Bewertungen
- El 103 First Floor PlanDokument1 SeiteEl 103 First Floor Plankhawaldeh jamalNoch keine Bewertungen
- El 102 Ground Floor PlanDokument1 SeiteEl 102 Ground Floor Plankhawaldeh jamalNoch keine Bewertungen
- m105 Generla Details Ac LayoutDokument1 Seitem105 Generla Details Ac Layoutkhawaldeh jamalNoch keine Bewertungen
- g002 Green Building DeclarationDokument1 Seiteg002 Green Building Declarationkhawaldeh jamalNoch keine Bewertungen
- El 101 Setting Out PlanDokument1 SeiteEl 101 Setting Out Plankhawaldeh jamalNoch keine Bewertungen
- El 105 Typical Installation DetailsDokument1 SeiteEl 105 Typical Installation Detailskhawaldeh jamalNoch keine Bewertungen
- m107 U Factory Sheet-2Dokument1 Seitem107 U Factory Sheet-2khawaldeh jamalNoch keine Bewertungen
- M104 Thermal Load Schedule PDFDokument1 SeiteM104 Thermal Load Schedule PDFkhawaldeh jamalNoch keine Bewertungen
- M105 Generla Details Ac Layout PDFDokument1 SeiteM105 Generla Details Ac Layout PDFkhawaldeh jamalNoch keine Bewertungen
- m106 U Factory Sheet-1Dokument1 Seitem106 U Factory Sheet-1khawaldeh jamalNoch keine Bewertungen
- m104 Thermal Load ScheduleDokument1 Seitem104 Thermal Load Schedulekhawaldeh jamalNoch keine Bewertungen
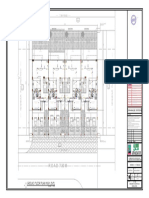
- LPG 103 First Floor PlanDokument1 SeiteLPG 103 First Floor Plankhawaldeh jamalNoch keine Bewertungen
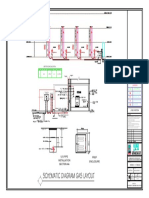
- LPG 106 Schematic Diagram Gas Layout PDFDokument1 SeiteLPG 106 Schematic Diagram Gas Layout PDFkhawaldeh jamal100% (1)
- Green Building General Notes SummaryDokument1 SeiteGreen Building General Notes Summarykhawaldeh jamalNoch keine Bewertungen
- P 104 First Floor PlanDokument1 SeiteP 104 First Floor Plankhawaldeh jamalNoch keine Bewertungen
- g002 Green Building DeclarationDokument1 Seiteg002 Green Building Declarationkhawaldeh jamalNoch keine Bewertungen
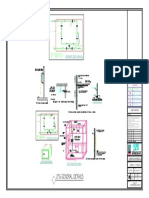
- LPG 107 LPG General DetailsDokument1 SeiteLPG 107 LPG General Detailskhawaldeh jamalNoch keine Bewertungen
- P 109 Fic LocationDokument1 SeiteP 109 Fic Locationkhawaldeh jamalNoch keine Bewertungen
- LPG 104 Terrace Floor PlanDokument1 SeiteLPG 104 Terrace Floor Plankhawaldeh jamalNoch keine Bewertungen
- LPG 102 Ground Floor PlanDokument1 SeiteLPG 102 Ground Floor Plankhawaldeh jamalNoch keine Bewertungen
- LPG 106 Schematic Diagram Gas LayoutDokument1 SeiteLPG 106 Schematic Diagram Gas Layoutkhawaldeh jamal0% (1)
- LPG 103 First Floor PlanDokument1 SeiteLPG 103 First Floor Plankhawaldeh jamalNoch keine Bewertungen
- P 106 Roof Floor Plan Water SupplyDokument1 SeiteP 106 Roof Floor Plan Water Supplykhawaldeh jamalNoch keine Bewertungen
- P 102 Ground Floor PlanDokument1 SeiteP 102 Ground Floor Plankhawaldeh jamalNoch keine Bewertungen
- P 002 Drainage General NotesDokument1 SeiteP 002 Drainage General Noteskhawaldeh jamalNoch keine Bewertungen
- P 107 Stair Case Head Room Roof Floor PlanDokument1 SeiteP 107 Stair Case Head Room Roof Floor Plankhawaldeh jamalNoch keine Bewertungen
- Structural (For Tender)Dokument12 SeitenStructural (For Tender)khawaldeh jamalNoch keine Bewertungen
- P 103 Ground Floor Plan High LevelDokument1 SeiteP 103 Ground Floor Plan High Levelkhawaldeh jamalNoch keine Bewertungen
- S 207 Column Details 8Dokument1 SeiteS 207 Column Details 8khawaldeh jamalNoch keine Bewertungen
- Astronomy - Galaxies and The Expanding UniverseDokument226 SeitenAstronomy - Galaxies and The Expanding UniverseDigiSvcNoch keine Bewertungen
- Solution - Tutorial 3Dokument11 SeitenSolution - Tutorial 3zgalionoooNoch keine Bewertungen
- ME8391 IQ 03 - by LearnEngineering - inDokument24 SeitenME8391 IQ 03 - by LearnEngineering - inelabalajiNoch keine Bewertungen
- Test4-Reading Passage 3Dokument2 SeitenTest4-Reading Passage 3vanpham248Noch keine Bewertungen
- Mathematics: Quarter 2 - Module 2Dokument27 SeitenMathematics: Quarter 2 - Module 2Auden Jay Allejos Curameng100% (1)
- Optical Electronics 4ed - Amon YarivDokument729 SeitenOptical Electronics 4ed - Amon YarivThomas BerryNoch keine Bewertungen
- Wave and Oscillation QuestionsDokument24 SeitenWave and Oscillation QuestionsAlok ChaturvediNoch keine Bewertungen
- IEEE Standard Application Guide For Low-Voltage AC Nonintegrally Fused Power Circuit Breakers (Using Separately Mounted Current-Limiting Fuses)Dokument12 SeitenIEEE Standard Application Guide For Low-Voltage AC Nonintegrally Fused Power Circuit Breakers (Using Separately Mounted Current-Limiting Fuses)ukritNoch keine Bewertungen
- U18CE404 Hydraulics EngineeringDokument2 SeitenU18CE404 Hydraulics EngineeringPENDLI SAI SATHWIKNoch keine Bewertungen
- 기초회로이론 챕터6 과제Dokument118 Seiten기초회로이론 챕터6 과제lostdream0515Noch keine Bewertungen
- Das Consultants: Design of 1000KL Capacity OHTDokument19 SeitenDas Consultants: Design of 1000KL Capacity OHTPrashant GargNoch keine Bewertungen
- TDA7286 Single Chip Preamplifier For Double Deck Radio CasseDokument6 SeitenTDA7286 Single Chip Preamplifier For Double Deck Radio CasseDunatoMNoch keine Bewertungen
- Air-Conditioning Tutor COP ExperimentDokument4 SeitenAir-Conditioning Tutor COP ExperimentJady chess24Noch keine Bewertungen
- SPM Physics Wave Oscillation Damping ResonanceDokument4 SeitenSPM Physics Wave Oscillation Damping ResonanceIVAN TIONG WEI JUN MoeNoch keine Bewertungen
- PIEAS Admission Test1Dokument17 SeitenPIEAS Admission Test1Naul NbnNoch keine Bewertungen
- Empanelled vendor list and cost details for rooftop solar power projectsDokument4 SeitenEmpanelled vendor list and cost details for rooftop solar power projectsAnkit JoshiNoch keine Bewertungen
- Tutorial - Conduction Heat TransferDokument3 SeitenTutorial - Conduction Heat TransferDayanidiNoch keine Bewertungen
- Design of Adaptive Sliding Mode Controller For Single-Phase Grid-Tied PV SystemDokument6 SeitenDesign of Adaptive Sliding Mode Controller For Single-Phase Grid-Tied PV SystemEngnr Kami ZebNoch keine Bewertungen
- Section 7Dokument3 SeitenSection 7Aduchelab AdamsonuniversityNoch keine Bewertungen
- AFM Lab. ManualDokument91 SeitenAFM Lab. Manual70109620Noch keine Bewertungen
- AppendixB PDFDokument9 SeitenAppendixB PDFnunun nurulNoch keine Bewertungen
- Science 6.5Dokument6 SeitenScience 6.5Nestlee ArnaizNoch keine Bewertungen
- 086 - 2004 Nov O Level Physics (5052) P1 P2 - Suggested Answers (PDF Library)Dokument4 Seiten086 - 2004 Nov O Level Physics (5052) P1 P2 - Suggested Answers (PDF Library)McDonald Whites JonesNoch keine Bewertungen
- 6 LevelsDokument7 Seiten6 LevelsSergio DiazNoch keine Bewertungen
- Measuring Viscosity at High Shear Rate by Tapered Bearing Simulator Viscometer at 100 °CDokument13 SeitenMeasuring Viscosity at High Shear Rate by Tapered Bearing Simulator Viscometer at 100 °Cmohammed karasnehNoch keine Bewertungen
- Ambipolar Transport Equation Describes Excess CarriersDokument30 SeitenAmbipolar Transport Equation Describes Excess CarriersVikas PsNoch keine Bewertungen
- Review Propagating ErrorDokument8 SeitenReview Propagating ErrorNg Swee Loong Steven100% (1)
- Mass Flow Rate Calculation MethodsDokument11 SeitenMass Flow Rate Calculation Methodsarashmehr9100% (1)
- Nicd Battery Charger: Design: K. WalravenDokument1 SeiteNicd Battery Charger: Design: K. WalravenjaliltaghdarehNoch keine Bewertungen
- Newton–Cartan Theory and Teleparallel Gravity: The Geometry of Gravitational TheoriesDokument12 SeitenNewton–Cartan Theory and Teleparallel Gravity: The Geometry of Gravitational TheoriesInês AlmeidaNoch keine Bewertungen