Das könnte Ihnen auch gefallen
- Differential Transformation Method for Mechanical Engineering ProblemsVon EverandDifferential Transformation Method for Mechanical Engineering ProblemsNoch keine Bewertungen
- Moog Hydraulic Servo Valve Construction Plus Moog PDFDokument13 SeitenMoog Hydraulic Servo Valve Construction Plus Moog PDFJean DesingermainNoch keine Bewertungen
- Deal With The Function of The Pressure Control Valves in Hydraulic Power SystemsDokument6 SeitenDeal With The Function of The Pressure Control Valves in Hydraulic Power Systems666667Noch keine Bewertungen
- Understanding Schematics: (Return To Table of Contents) 123Dokument15 SeitenUnderstanding Schematics: (Return To Table of Contents) 123bmrajahNoch keine Bewertungen
- Hydraulics NotesDokument16 SeitenHydraulics NotesMadhusudhan ReddyNoch keine Bewertungen
- HPS Notes of Lecture PDFDokument63 SeitenHPS Notes of Lecture PDFsbhalesh100% (2)
- Hydraulic Circuits and ApplicationsDokument20 SeitenHydraulic Circuits and ApplicationsLalola HahohaNoch keine Bewertungen
- BOOK 2, CHAPTER 1 - Hydraulic Accumulators (Part 3)Dokument9 SeitenBOOK 2, CHAPTER 1 - Hydraulic Accumulators (Part 3)Gonzalo Alvarez100% (1)
- Industrial Hydraulic CircuitsDokument16 SeitenIndustrial Hydraulic CircuitskingkakingNoch keine Bewertungen
- Valves 18Dokument40 SeitenValves 18M RazzaqueNoch keine Bewertungen
- Hydraulic System:-: Chapter-2 Hydraulic, Pneumatic and Electrical Telemetry SystemsDokument7 SeitenHydraulic System:-: Chapter-2 Hydraulic, Pneumatic and Electrical Telemetry SystemsMayur ParmarNoch keine Bewertungen
- Lecture 17Dokument16 SeitenLecture 17Sourabh MakhamNoch keine Bewertungen
- Basic Hydraulic Training ModuleDokument36 SeitenBasic Hydraulic Training ModuleVivek Kumar100% (1)
- Velammal Engineering College, Chennai - 600066.: Department of Mechanical Engineering University Question BankDokument6 SeitenVelammal Engineering College, Chennai - 600066.: Department of Mechanical Engineering University Question BankmurugesanvNoch keine Bewertungen
- Hydraulic and PneumaticDokument20 SeitenHydraulic and PneumaticmorolosusNoch keine Bewertungen
- Hydraulic SystemsDokument42 SeitenHydraulic SystemsGauthamNoch keine Bewertungen
- Lesson 3 - Hydraulic PumpDokument10 SeitenLesson 3 - Hydraulic PumppowertrainlNoch keine Bewertungen
- Electro - Proportional ValvesDokument47 SeitenElectro - Proportional Valveshamidouhou100% (1)
- Coool Hydraulic System Design ThesisDokument235 SeitenCoool Hydraulic System Design ThesisGirish Kasturi100% (1)
- UNIT-II - 2.servo, Hydraulics and PneumaticsDokument33 SeitenUNIT-II - 2.servo, Hydraulics and PneumaticsSgsksbskxvxk100% (1)
- Me55 - Applied Hydraulics & Pneumatics PDFDokument12 SeitenMe55 - Applied Hydraulics & Pneumatics PDFPandiya RajanNoch keine Bewertungen
- Hydrostatic Drives Lect8Dokument5 SeitenHydrostatic Drives Lect8Rehan RashidNoch keine Bewertungen
- Symbols and ComponentsDokument17 SeitenSymbols and ComponentsetaNoch keine Bewertungen
- Lecture 1 - Fluid Power - An Introduction PDFDokument40 SeitenLecture 1 - Fluid Power - An Introduction PDFbmdbmdbmd100% (1)
- Electro Hydraulic Servo ValveDokument8 SeitenElectro Hydraulic Servo ValveabyzenNoch keine Bewertungen
- Oil (Your Hidden Asset)Dokument17 SeitenOil (Your Hidden Asset)jorge campos100% (1)
- Hydraulic Circuits - 2 BackupDokument13 SeitenHydraulic Circuits - 2 BackupklashincoviskyNoch keine Bewertungen
- Unbalanced Vane PumpsModern Industrial Hydraulics - Modern Industrial HydraulicsDokument5 SeitenUnbalanced Vane PumpsModern Industrial Hydraulics - Modern Industrial HydraulicsRaghu KrishnanNoch keine Bewertungen
- Hydraulic System ObjectivesDokument4 SeitenHydraulic System ObjectivesMegha KharcheNoch keine Bewertungen
- High Precision Position Control of Electro-Hydraulic Servo SystemDokument10 SeitenHigh Precision Position Control of Electro-Hydraulic Servo Systemamin342Noch keine Bewertungen
- Rohm Lathe ChucksDokument91 SeitenRohm Lathe ChucksNebojša ObradovićNoch keine Bewertungen
- Hydraulic Servo ValveDokument36 SeitenHydraulic Servo ValvesayproNoch keine Bewertungen
- Industrial (Steam) : 26 © 2004 The Trustees of The University of IllinoisDokument21 SeitenIndustrial (Steam) : 26 © 2004 The Trustees of The University of IllinoisArini Rizal100% (1)
- Hydraulic Cylinder - ReferenceDokument95 SeitenHydraulic Cylinder - ReferenceWarren RiveraNoch keine Bewertungen
- Hydraulic Schematic SymbolsDokument12 SeitenHydraulic Schematic SymbolsswainpiyushNoch keine Bewertungen
- Difinition of Load SensingDokument16 SeitenDifinition of Load SensingMahmmod Al-QawasmehNoch keine Bewertungen
- Day 1b - Introduction To Fluid Power SystemDokument32 SeitenDay 1b - Introduction To Fluid Power SystemVenkatesh GangadharNoch keine Bewertungen
- Mechatronics Module 2Dokument53 SeitenMechatronics Module 2ASWATHY V RNoch keine Bewertungen
- Lecture 0 Appendix Intro Fluid PowerDokument61 SeitenLecture 0 Appendix Intro Fluid PowerSAMUEL MAKATANENoch keine Bewertungen
- Industrial Automation: BITS Pilani, Pilani CampusDokument132 SeitenIndustrial Automation: BITS Pilani, Pilani CampusAnurag RanjanNoch keine Bewertungen
- MHV Proportional Directional Control Valve Series MHV... K: FeaturesDokument28 SeitenMHV Proportional Directional Control Valve Series MHV... K: FeaturesthijssilderhuisNoch keine Bewertungen
- Aircraft Hydraulic System 58a22e86ebd79Dokument23 SeitenAircraft Hydraulic System 58a22e86ebd79Hein SoeNoch keine Bewertungen
- Basic Vocational: HydraulicDokument33 SeitenBasic Vocational: HydraulicIbnu Awalla100% (1)
- Chapter 7 - Hydraulic Operation Circuit and ApplicationDokument19 SeitenChapter 7 - Hydraulic Operation Circuit and ApplicationMuhammad AbdullahNoch keine Bewertungen
- Circuits - CourseDokument93 SeitenCircuits - Coursehasan bish100% (1)
- Installation Maintenance CalzoniDokument75 SeitenInstallation Maintenance Calzonimobydick230% (1)
- Hawe Prop Directional Spool Valve Type PSLF and PSVF PDFDokument4 SeitenHawe Prop Directional Spool Valve Type PSLF and PSVF PDFY.EbadiNoch keine Bewertungen
- HYDAC Understanding Hydraulics1 MAR 2015Dokument5 SeitenHYDAC Understanding Hydraulics1 MAR 2015marc271986Noch keine Bewertungen
- Fluid Mechanics - A. K. Choudhary and Om PrakashDokument98 SeitenFluid Mechanics - A. K. Choudhary and Om PrakashRohit ThakurNoch keine Bewertungen
- Hydraulic and Pnuematic Schematic Symbols PDFDokument6 SeitenHydraulic and Pnuematic Schematic Symbols PDFMiguelAlejandroObregónOlivaNoch keine Bewertungen
- 2 Sim Hydraulics ReferenceDokument430 Seiten2 Sim Hydraulics ReferenceEnrico GambiniNoch keine Bewertungen
- Control Components in Hydraulic SystemsDokument20 SeitenControl Components in Hydraulic SystemsfazliNoch keine Bewertungen
- HydraulicDokument12 SeitenHydraulicNitu Sharma100% (1)
- Lab 2 Hydraulic Fluid PowerDokument20 SeitenLab 2 Hydraulic Fluid PowerHanisahKhalilNoch keine Bewertungen
- Hydraulic MachineryDokument13 SeitenHydraulic MachineryCarlito PantalunanNoch keine Bewertungen
- Flow Control ValvesDokument6 SeitenFlow Control ValvesMohamed RadwanNoch keine Bewertungen
- 5.CHAPTER 13 - Flow Controls and Flow DividersDokument12 Seiten5.CHAPTER 13 - Flow Controls and Flow DividersVinod YbNoch keine Bewertungen
- TE-lab Manual IHPDokument13 SeitenTE-lab Manual IHPmailsk123Noch keine Bewertungen
- Proportional and ServovalvesDokument14 SeitenProportional and ServovalvesMarius IsdrailaNoch keine Bewertungen
- Hydraulic and Pneumatic CircuitsDokument8 SeitenHydraulic and Pneumatic CircuitsTony EduokNoch keine Bewertungen
- Eck - Engine Control System (k9k)Dokument405 SeitenEck - Engine Control System (k9k)Eliecer Bayona100% (7)
- Beam Formulas With Shear and MomentsDokument16 SeitenBeam Formulas With Shear and MomentsJay ShadNoch keine Bewertungen
- Refrigerator: Service ManualDokument44 SeitenRefrigerator: Service ManualBetileno QuadAlexNoch keine Bewertungen
- GesanDokument7 SeitenGesanBetileno QuadAlexNoch keine Bewertungen
- Serial KeysDokument1 SeiteSerial KeysBetileno QuadAlexNoch keine Bewertungen
- Lehe0297 02Dokument3 SeitenLehe0297 02Betileno QuadAlexNoch keine Bewertungen
- TDC Sensor LocationDokument1 SeiteTDC Sensor LocationBetileno QuadAlexNoch keine Bewertungen
- 2000 Ford F-450 FeaturesDokument1 Seite2000 Ford F-450 FeaturesBetileno QuadAlexNoch keine Bewertungen
- Espace JE G9T 13Dokument43 SeitenEspace JE G9T 13domenico_ciccimarra3996Noch keine Bewertungen
- Audi TT Coupe Mk1 Quick RefDokument4 SeitenAudi TT Coupe Mk1 Quick RefkuraiNoch keine Bewertungen
- 1NZ FE EngineDokument59 Seiten1NZ FE Engineimtiaz_masud_175% (4)
- SwiftDokument1 SeiteSwiftBetileno QuadAlexNoch keine Bewertungen
- Captiva Wiring DiagramDokument9 SeitenCaptiva Wiring DiagramBetileno QuadAlex100% (1)
- Panasonic KX-DT333 / KX-DT343 / KX-DT346 User GuideDokument10 SeitenPanasonic KX-DT333 / KX-DT343 / KX-DT346 User GuideBetileno QuadAlexNoch keine Bewertungen
- The Servo-Valve SpoolDokument1 SeiteThe Servo-Valve SpoolBetileno QuadAlexNoch keine Bewertungen
- Starting System PDFDokument25 SeitenStarting System PDFAnderson ToribiioNoch keine Bewertungen
- Hydraulic Vibration and NoiseDokument10 SeitenHydraulic Vibration and NoiseBetileno QuadAlex100% (1)
- Hydraulic Filters FiltrationDokument16 SeitenHydraulic Filters FiltrationBetileno QuadAlexNoch keine Bewertungen
- Hydraulic Servo SystemsDokument15 SeitenHydraulic Servo SystemsBetileno QuadAlexNoch keine Bewertungen
- Electro Modulated HydraulicsDokument8 SeitenElectro Modulated HydraulicsBetileno QuadAlexNoch keine Bewertungen
- Hydraulic AdvantageDokument1 SeiteHydraulic AdvantageBetileno QuadAlexNoch keine Bewertungen
- Fluid Power UnitsDokument1 SeiteFluid Power UnitsBetileno QuadAlexNoch keine Bewertungen
- Hydraulic Actuator PerformanceDokument14 SeitenHydraulic Actuator PerformanceBetileno QuadAlexNoch keine Bewertungen
- Canter Potential WiringDokument1 SeiteCanter Potential WiringBetileno QuadAlexNoch keine Bewertungen
- 2Dokument1 Seite2Betileno QuadAlexNoch keine Bewertungen
- Hydraulic Handbook PDFDokument781 SeitenHydraulic Handbook PDFMarcosIvanMireles80% (5)
- HellotDokument1 SeiteHellotBetileno QuadAlexNoch keine Bewertungen
- Half Mask Supplied Air Respirator Allegro 9215-02Dokument5 SeitenHalf Mask Supplied Air Respirator Allegro 9215-02Betileno QuadAlexNoch keine Bewertungen
- Half Mask Supplied Air Respirator Allegro 9215-02Dokument5 SeitenHalf Mask Supplied Air Respirator Allegro 9215-02Betileno QuadAlexNoch keine Bewertungen
- University of Wah Wah Engineering College Assignment # 05Dokument6 SeitenUniversity of Wah Wah Engineering College Assignment # 05Ha M ZaNoch keine Bewertungen
- Installation InstructionsDokument3 SeitenInstallation InstructionsRosaLovaNoch keine Bewertungen
- Performance CH 33Dokument54 SeitenPerformance CH 33Yasichalew sefinehNoch keine Bewertungen
- Electronic Let Off MotionDokument3 SeitenElectronic Let Off MotionWaqar Baloch100% (2)
- Wireless NetworkingDokument200 SeitenWireless NetworkingVamsikrishna PanugantiNoch keine Bewertungen
- Sabor CaseDokument3 SeitenSabor CaseTushar LaroiyaNoch keine Bewertungen
- Links Deep WebDokument2 SeitenLinks Deep WebArnoldTorresNoch keine Bewertungen
- Three-Phase Induction Motor Dynamic Mathematical ModelDokument3 SeitenThree-Phase Induction Motor Dynamic Mathematical Modelsajs201100% (3)
- Careers 2Dokument1 SeiteCareers 2CityPressNoch keine Bewertungen
- Thinker Thought Sara HendrenDokument1 SeiteThinker Thought Sara HendrenNathaniel RiversNoch keine Bewertungen
- Oisd STD-141Dokument31 SeitenOisd STD-141Jyotsana Rawat83% (6)
- Tutorial 2 What Is The Output of The Below Program?Dokument2 SeitenTutorial 2 What Is The Output of The Below Program?Sunitha BabuNoch keine Bewertungen
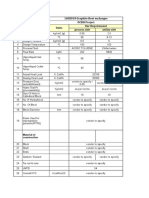
- 16HE018 Graphite Heat Exchanger DCBH Project Sr. No. Particulars Units Our Requirement Process Side Utility SideDokument2 Seiten16HE018 Graphite Heat Exchanger DCBH Project Sr. No. Particulars Units Our Requirement Process Side Utility SideBhaumik BhuvaNoch keine Bewertungen
- ABB SWBD VD4 Brochure PDFDokument6 SeitenABB SWBD VD4 Brochure PDFanand_girgaonkarNoch keine Bewertungen
- Osisense ManualDokument2 SeitenOsisense ManualLki SelfNoch keine Bewertungen
- Installation Operation Maintenance 7200CB en USDokument140 SeitenInstallation Operation Maintenance 7200CB en USEleno RibeiroNoch keine Bewertungen
- ICEpublishing Complete 2014 Books CatalogueDokument44 SeitenICEpublishing Complete 2014 Books CatalogueLamija LamyNoch keine Bewertungen
- CE Board Nov 2020 - Hydraulics - Set 11Dokument1 SeiteCE Board Nov 2020 - Hydraulics - Set 11Justine Ejay MoscosaNoch keine Bewertungen
- VLSI Design FlowDokument20 SeitenVLSI Design FlowPranav DarganNoch keine Bewertungen
- 1.5-7 Power Distribution Systems Reference Data: Motor ProtectionDokument1 Seite1.5-7 Power Distribution Systems Reference Data: Motor ProtectionMiguel Augusto Donayre CarbajalNoch keine Bewertungen
- Emd-Mi928 Sistema de LubricacionDokument6 SeitenEmd-Mi928 Sistema de LubricacionVictor Raul Tobosque Muñoz100% (1)
- TD Operation MaintenanceDokument51 SeitenTD Operation MaintenanceHassam Ahmad100% (1)
- Wike Tec 530 Assignment 1Dokument11 SeitenWike Tec 530 Assignment 1heatherpianistNoch keine Bewertungen
- Comparative Analysis of Wear Rate of Coated Hss Tool and Non-Coated Hss Tool by Using Cr-Zn-NiDokument21 SeitenComparative Analysis of Wear Rate of Coated Hss Tool and Non-Coated Hss Tool by Using Cr-Zn-Nithai avvaiNoch keine Bewertungen
- EOI - Replacement of CSU & OGC at UranDokument7 SeitenEOI - Replacement of CSU & OGC at UranGaurav TripathiNoch keine Bewertungen
- Ultrasafe AESDokument7 SeitenUltrasafe AEShuyNoch keine Bewertungen
- Ingrid Olderock La Mujer de Los Perros by Nancy GuzmnDokument14 SeitenIngrid Olderock La Mujer de Los Perros by Nancy GuzmnYuki Hotaru0% (3)
- 260 Postulates of The Dynamics of TimeDokument78 Seiten260 Postulates of The Dynamics of Timesmartjohnsmith10100% (2)
- Sony Blitz h36 - ManualDokument212 SeitenSony Blitz h36 - ManualBohorc Ivica JerryNoch keine Bewertungen
- Acer Computers Aspire 9300 Aspire 9300 Aspire 7000 Service Guide Ae6e07aDokument143 SeitenAcer Computers Aspire 9300 Aspire 9300 Aspire 7000 Service Guide Ae6e07acvotechnicalsNoch keine Bewertungen