Das könnte Ihnen auch gefallen
- Synchronous Machine DesignDokument35 SeitenSynchronous Machine DesigndiptiNoch keine Bewertungen
- Choice of Specific Loading1Dokument4 SeitenChoice of Specific Loading1JosephNoch keine Bewertungen
- Design of Synchronous MachineDokument25 SeitenDesign of Synchronous Machineneenu_tNoch keine Bewertungen
- Synchronous Machine DesignDokument35 SeitenSynchronous Machine DesignvietnhuNoch keine Bewertungen
- Design of Synchronous MachineDokument25 SeitenDesign of Synchronous MachineHiren KapadiaNoch keine Bewertungen
- Design of Synchronous MachinesDokument17 SeitenDesign of Synchronous MachinesNiteshNarukaNoch keine Bewertungen
- Determine Different Parameters and Design of DC MachineDokument31 SeitenDetermine Different Parameters and Design of DC Machinechandan kumarNoch keine Bewertungen
- Design Perspective of Construction of Synchronous MachinesDokument40 SeitenDesign Perspective of Construction of Synchronous MachinesJosephNoch keine Bewertungen
- Constructional Details:: 1. Explain The Construction Details of Synchronous MotorDokument28 SeitenConstructional Details:: 1. Explain The Construction Details of Synchronous MotorrioNoch keine Bewertungen
- Design of DC Machines ConstructionDokument42 SeitenDesign of DC Machines ConstructionSatya Sudhakar RasamsettiNoch keine Bewertungen
- CHAPTER 3 Induction Machine PDFDokument32 SeitenCHAPTER 3 Induction Machine PDFhailay haderaNoch keine Bewertungen
- Unit 2 Machines: Design of DCDokument29 SeitenUnit 2 Machines: Design of DCNANDHAKUMAR ANoch keine Bewertungen
- Induction Motor Notes LVBDokument14 SeitenInduction Motor Notes LVBlvb123Noch keine Bewertungen
- Question Bank: DEPARTMENT OF EEE/Electrical Machines-II/III YEARDokument22 SeitenQuestion Bank: DEPARTMENT OF EEE/Electrical Machines-II/III YEARPartha Roy100% (1)
- Power Systems TheoryDokument13 SeitenPower Systems TheoryGitta JoshuaNoch keine Bewertungen
- Eee 205-W1Dokument24 SeitenEee 205-W1mahamudul hasan100% (1)
- Question BankDokument17 SeitenQuestion BankJeslin CharlesNoch keine Bewertungen
- 13 Chapter 4Dokument37 Seiten13 Chapter 4Raj AryanNoch keine Bewertungen
- CH - 5 Synchronous MachinesDokument28 SeitenCH - 5 Synchronous MachinesNAHOM ANTENEHNoch keine Bewertungen
- Basic Operation and Constructional Features of A DC Machine AreDokument28 SeitenBasic Operation and Constructional Features of A DC Machine AreBrijesh PrasadNoch keine Bewertungen
- Definition: In: o o o oDokument4 SeitenDefinition: In: o o o orevurevathiNoch keine Bewertungen
- Lecture 7 - Synchronous Generators PDFDokument38 SeitenLecture 7 - Synchronous Generators PDFMd Rodi BidinNoch keine Bewertungen
- Inductionmotor DesignDokument31 SeitenInductionmotor Designbilalbaig97Noch keine Bewertungen
- Machine Design 1Dokument36 SeitenMachine Design 1stanely njogooNoch keine Bewertungen
- Transient AnalysisDokument16 SeitenTransient Analysisdr_biltNoch keine Bewertungen
- Abigail EE 330 Assignment 7Dokument12 SeitenAbigail EE 330 Assignment 7Jay EyNoch keine Bewertungen
- Conventional Design ProcedureDokument3 SeitenConventional Design ProcedurevinothNoch keine Bewertungen
- EMD U2 - Study MaterialDokument7 SeitenEMD U2 - Study MaterialSUJITHA NNoch keine Bewertungen
- Power Systems AssignmentDokument12 SeitenPower Systems AssignmentJbmulindwaNoch keine Bewertungen
- Design and Analysis of 42-V Permanent-Magnet Generator For Automotive ApplicationsDokument12 SeitenDesign and Analysis of 42-V Permanent-Magnet Generator For Automotive ApplicationsNicholas ValdezNoch keine Bewertungen
- Basics of Rotating MachinesDokument9 SeitenBasics of Rotating MachinesAdrika SaloniNoch keine Bewertungen
- WMCDokument65 SeitenWMCbhagathnagarNoch keine Bewertungen
- Assignment # 7Dokument14 SeitenAssignment # 7Jay EyNoch keine Bewertungen
- Induction Motor Design PDFDokument46 SeitenInduction Motor Design PDFdiptiNoch keine Bewertungen
- 2011 Design and Construction of Axial Flux Permanent Magnet Generator For Wind Turbine Generated DC Voltage at Rated Power 1500 W (Office)Dokument4 Seiten2011 Design and Construction of Axial Flux Permanent Magnet Generator For Wind Turbine Generated DC Voltage at Rated Power 1500 W (Office)Fazal Karim Mahsud100% (1)
- A Alternator DesignDokument6 SeitenA Alternator DesignKathir RkpNoch keine Bewertungen
- SMMA Motor GlossaryDokument11 SeitenSMMA Motor GlossaryNurulHardyNoch keine Bewertungen
- Question Bank For Emd-1Dokument5 SeitenQuestion Bank For Emd-1the_ray004Noch keine Bewertungen
- Transformer - NTDokument108 SeitenTransformer - NTSaurabh DubeyNoch keine Bewertungen
- Chapter-5 Synchronous MacineDokument30 SeitenChapter-5 Synchronous MacineAman BazeNoch keine Bewertungen
- Chapter2 1Dokument3 SeitenChapter2 1Leo Paulo Del Rosario40% (5)
- DCDokument18 SeitenDCPankaj KaleNoch keine Bewertungen
- Ac Generators: By:D.deepa Lakshmi 12 BDokument11 SeitenAc Generators: By:D.deepa Lakshmi 12 BSharuk sNoch keine Bewertungen
- Assignment 01: Dmx4307 - Electrical Machines and DrivesDokument10 SeitenAssignment 01: Dmx4307 - Electrical Machines and DrivesG.G. PRABHATH CHINTHAKANoch keine Bewertungen
- DC MachinesDokument42 SeitenDC Machineseee2014.rvsNoch keine Bewertungen
- Peres 10PPS103 2 Electrical Machines PDFDokument71 SeitenPeres 10PPS103 2 Electrical Machines PDFThanigaivel RajaNoch keine Bewertungen
- DC Machine PDFDokument35 SeitenDC Machine PDFPulkit Kumar Chauhan92% (24)
- Lecture 1 - Direct-Current Generator and Motor PrinciplesDokument31 SeitenLecture 1 - Direct-Current Generator and Motor PrinciplesVincere Vja100% (1)
- Electrical Generators PDFDokument71 SeitenElectrical Generators PDFchaithra hsNoch keine Bewertungen
- FINAL ET NOTES-5 UnitsDokument121 SeitenFINAL ET NOTES-5 Unitsbapiraju saripellaNoch keine Bewertungen
- Module Name:Electrical Machine I Module Code: Elt213: by AMAHIRWE Jean ClaudeDokument30 SeitenModule Name:Electrical Machine I Module Code: Elt213: by AMAHIRWE Jean ClaudeOmar DjazzoNoch keine Bewertungen
- EE6504 Electrical Machines-II (2 Mark Q & A) PDFDokument16 SeitenEE6504 Electrical Machines-II (2 Mark Q & A) PDFUnknownNoch keine Bewertungen
- Unit I Synchronous Generator 9: Ee 8401 - Electrical Machines - IiDokument28 SeitenUnit I Synchronous Generator 9: Ee 8401 - Electrical Machines - Ii8262 Vipul KumarNoch keine Bewertungen
- Lab 3: Separately Excited DC Generator (Open Circuit Characteristics)Dokument3 SeitenLab 3: Separately Excited DC Generator (Open Circuit Characteristics)Kendall BirjueNoch keine Bewertungen
- D.C. Machine - Study NotesDokument32 SeitenD.C. Machine - Study NotesGentle ManNoch keine Bewertungen
- Differential Forms on Electromagnetic NetworksVon EverandDifferential Forms on Electromagnetic NetworksBewertung: 4 von 5 Sternen4/5 (1)
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesVon EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNoch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Bewertung: 2.5 von 5 Sternen2.5/5 (3)
- Solution Manual for 100 Genesys Design Examples: Second EditionVon EverandSolution Manual for 100 Genesys Design Examples: Second EditionNoch keine Bewertungen
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)Von EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)Noch keine Bewertungen
- Adobe Scan 03 Apr 2023 1Dokument3 SeitenAdobe Scan 03 Apr 2023 1Mulayam Singh ChoudharyNoch keine Bewertungen
- GKDokument5 SeitenGK251105Noch keine Bewertungen
- Disaster NotesDokument15 SeitenDisaster NotesMulayam Singh ChoudharyNoch keine Bewertungen
- Business Analyst - 1st MarchDokument2 SeitenBusiness Analyst - 1st MarchMulayam Singh ChoudharyNoch keine Bewertungen
- Some Important Websites For Engineering Diploma From AICTE.Dokument1 SeiteSome Important Websites For Engineering Diploma From AICTE.Mulayam Singh ChoudharyNoch keine Bewertungen
- Digital Safety - Wellbeing Aicte-Iste FDPDokument2 SeitenDigital Safety - Wellbeing Aicte-Iste FDPMulayam Singh ChoudharyNoch keine Bewertungen
- 7505 2Dokument29 Seiten7505 2Mulayam Singh ChoudharyNoch keine Bewertungen
- Some Important Websites For Engineering Diploma From AICTE.Dokument1 SeiteSome Important Websites For Engineering Diploma From AICTE.Mulayam Singh ChoudharyNoch keine Bewertungen
- Environmental Notes NEWDokument31 SeitenEnvironmental Notes NEWtvineethNoch keine Bewertungen
- Delhi Electric Vehicles Policy 2020Dokument13 SeitenDelhi Electric Vehicles Policy 2020Annish KumarNoch keine Bewertungen
- Objective Questions (01 To 15) : Environmental EngineeringDokument760 SeitenObjective Questions (01 To 15) : Environmental EngineeringMulayam Singh ChoudharyNoch keine Bewertungen
- IT (Intermediary Guidelines and Digital Media Ethics Code) Rules, 2021 EnglishDokument16 SeitenIT (Intermediary Guidelines and Digital Media Ethics Code) Rules, 2021 EnglishMulayam Singh ChoudharyNoch keine Bewertungen
- BE VII Semester (All Branches) ONLINE Examination 2021Dokument1 SeiteBE VII Semester (All Branches) ONLINE Examination 2021Mulayam Singh ChoudharyNoch keine Bewertungen
- Final PDF SteelDokument180 SeitenFinal PDF SteelMulayam Singh ChoudharyNoch keine Bewertungen
- Reasoning AbilitiesDokument15 SeitenReasoning AbilitiesMulayam Singh Choudhary100% (1)
- BTech Project Format-3Dokument4 SeitenBTech Project Format-3Mulayam Singh ChoudharyNoch keine Bewertungen
- Paper ViewDokument11 SeitenPaper Viewsuresh151971Noch keine Bewertungen
- Assign 3&4Dokument3 SeitenAssign 3&4Mulayam Singh ChoudharyNoch keine Bewertungen
- Ai Controlled Home Appliance Control System Using Iot: Team 2 Luis GomesDokument5 SeitenAi Controlled Home Appliance Control System Using Iot: Team 2 Luis GomesDivya PriyadarshniNoch keine Bewertungen
- List of Psus: Centre For Engineering StudiesDokument6 SeitenList of Psus: Centre For Engineering StudiesMulayam Singh ChoudharyNoch keine Bewertungen
- List of Psus: Centre For Engineering StudiesDokument6 SeitenList of Psus: Centre For Engineering StudiesMulayam Singh ChoudharyNoch keine Bewertungen
- DocumentDokument1 SeiteDocumentMulayam Singh ChoudharyNoch keine Bewertungen
- Object:: Experiment No. - 05Dokument4 SeitenObject:: Experiment No. - 05Mulayam Singh ChoudharyNoch keine Bewertungen
- List of Psus: Centre For Engineering StudiesDokument6 SeitenList of Psus: Centre For Engineering StudiesMulayam Singh ChoudharyNoch keine Bewertungen
- Kota RailwayDokument40 SeitenKota RailwayMulayam Singh Choudhary0% (1)
- Mathematics KSSM Form 3: Chapter 9:straight LinesDokument14 SeitenMathematics KSSM Form 3: Chapter 9:straight LinesNUR RAIHAN BINTI ABDUL RAHIM MoeNoch keine Bewertungen
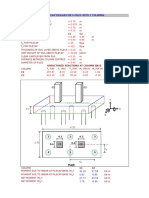
- Pile Cap For 6 PilesDokument4 SeitenPile Cap For 6 PilesHemant Sonawadekar100% (2)
- Optoelectronics: Chapter #6 Optical Sources 1: The LaserDokument14 SeitenOptoelectronics: Chapter #6 Optical Sources 1: The LaserMehroz FatimaNoch keine Bewertungen
- Type 1: Technical ParametersDokument7 SeitenType 1: Technical ParametersMuhammad AliNoch keine Bewertungen
- Quantum Mechanical Explanation For Dark Energy, Cosmic Coincidence, Flatness, Age, and Size of The UniverseDokument8 SeitenQuantum Mechanical Explanation For Dark Energy, Cosmic Coincidence, Flatness, Age, and Size of The UniverseAsemSalehNoch keine Bewertungen
- Tezpur University BTech (Mechanical Engineering) Syllabus FDokument41 SeitenTezpur University BTech (Mechanical Engineering) Syllabus FRajkamal ChoudharyNoch keine Bewertungen
- Chapter 2: Directional DrillingDokument73 SeitenChapter 2: Directional DrillingBouazizizi MOHAMEDNoch keine Bewertungen
- Chapter2 - 2nd LectureDokument22 SeitenChapter2 - 2nd LectureKAMALJEET SINGHNoch keine Bewertungen
- Properties of Waves QPDokument13 SeitenProperties of Waves QPOmar ShamaylehNoch keine Bewertungen
- Unit 4 (Velocity and Static Force Analysis)Dokument42 SeitenUnit 4 (Velocity and Static Force Analysis)Meenakshi PriyaNoch keine Bewertungen
- Current TransformerDokument5 SeitenCurrent TransformerPrateek SinghNoch keine Bewertungen
- Vectors: Answers: (1) (A), (B) +, (C) 2, (D) +, (2) (A) +, (B) 2, (C) +Dokument8 SeitenVectors: Answers: (1) (A), (B) +, (C) 2, (D) +, (2) (A) +, (B) 2, (C) +Supriti SarkerNoch keine Bewertungen
- AP Biology Unit 1 Biochemistry Cheat SheetDokument2 SeitenAP Biology Unit 1 Biochemistry Cheat Sheetf2vn65zbh9Noch keine Bewertungen
- Fluid-Mechanics Civil JunctionDokument212 SeitenFluid-Mechanics Civil JunctionARPITNoch keine Bewertungen
- Synchronous Servo Motor For Screw Drives (Direct Drive For Threaded Nut)Dokument20 SeitenSynchronous Servo Motor For Screw Drives (Direct Drive For Threaded Nut)markokocNoch keine Bewertungen
- 2016 Electrical Standards Products Guide PDFDokument93 Seiten2016 Electrical Standards Products Guide PDFABELWALIDNoch keine Bewertungen
- Ms3 Quadratic BookDokument29 SeitenMs3 Quadratic BookZaman AnikNoch keine Bewertungen
- English Vocab - Sheet6Dokument15 SeitenEnglish Vocab - Sheet6mohd dilshadNoch keine Bewertungen
- 3D Underwater Scene: Step 1 Mental Ray RendererDokument19 Seiten3D Underwater Scene: Step 1 Mental Ray RendererDenny TanNoch keine Bewertungen
- Introduction To Density Functional Theory: NSF/DOE Quantum Science Summer SchoolDokument44 SeitenIntroduction To Density Functional Theory: NSF/DOE Quantum Science Summer SchoolSnape is the bestNoch keine Bewertungen
- 3 4 by Writing Each Number Correct To 1 Significant Figure, Find An Estimate For The Value ofDokument5 Seiten3 4 by Writing Each Number Correct To 1 Significant Figure, Find An Estimate For The Value ofZunaira SafdarNoch keine Bewertungen
- CSIR - UGC NET Chemical Sciences (CH) SyllabusDokument3 SeitenCSIR - UGC NET Chemical Sciences (CH) SyllabusasmiNoch keine Bewertungen
- 153 Chymical AphorismsDokument6 Seiten153 Chymical AphorismsCristian CmNoch keine Bewertungen
- Harman Kardon Avr-2600 SMDokument216 SeitenHarman Kardon Avr-2600 SMCarollyne SabioniNoch keine Bewertungen
- What Is A HIPODokument8 SeitenWhat Is A HIPOashraf1971Noch keine Bewertungen
- Catalogue - Proflex Disc DiffuserDokument2 SeitenCatalogue - Proflex Disc DiffuserAzhar MandhraNoch keine Bewertungen
- Electronics NotesDokument1 SeiteElectronics NoteshpqNoch keine Bewertungen
- Medium Ionization For Improved Aerodynamic PerformanceDokument1 SeiteMedium Ionization For Improved Aerodynamic PerformanceArnav KumarNoch keine Bewertungen
- 371r 98 PDFDokument36 Seiten371r 98 PDFFred PrzNoch keine Bewertungen
- 120 X 120 X 38 MM SERIES: Dimensions DrawingDokument2 Seiten120 X 120 X 38 MM SERIES: Dimensions DrawingElias CoelhoNoch keine Bewertungen