Das könnte Ihnen auch gefallen
- O level Physics Questions And Answer Practice Papers 2Von EverandO level Physics Questions And Answer Practice Papers 2Bewertung: 5 von 5 Sternen5/5 (1)
- Grade 11 Physics ModuleDokument119 SeitenGrade 11 Physics ModuleJoanne Moh100% (1)
- AP Physics 1 Practice Test 2Dokument18 SeitenAP Physics 1 Practice Test 2John BoswellNoch keine Bewertungen
- Center of Gravity Vs Center of MassDokument25 SeitenCenter of Gravity Vs Center of Massguptafamily1992Noch keine Bewertungen
- Mechanics: Problems in Undergraduate PhysicsVon EverandMechanics: Problems in Undergraduate PhysicsBewertung: 3.5 von 5 Sternen3.5/5 (2)
- An Introduction To Thermodynamics and Statistical Mechanics Solutions - StoweDokument22 SeitenAn Introduction To Thermodynamics and Statistical Mechanics Solutions - StoweMagy Como100% (2)
- Mechanical Vibration Solved ExamplesDokument84 SeitenMechanical Vibration Solved ExamplesParas Thakur92% (172)
- Review 3 SearchableDokument16 SeitenReview 3 SearchablehquynhNoch keine Bewertungen
- Experiment 3: Conditions For EquilibriumDokument8 SeitenExperiment 3: Conditions For EquilibriumToni Andrei CervalesNoch keine Bewertungen
- Living SystemsDokument45 SeitenLiving SystemslorettaensNoch keine Bewertungen
- Electrochemical Processes in Biological SystemsVon EverandElectrochemical Processes in Biological SystemsAndrzej LewenstamNoch keine Bewertungen
- Solucionario Tipler 6 EdicionDokument6 SeitenSolucionario Tipler 6 EdicionLubeck Abraham Huaman Ponce25% (4)
- PhysicsDokument3 SeitenPhysicskartikmahtole.8eNoch keine Bewertungen
- Free Physics Solved Practice Test For AFMC Pune Entrance TestDokument8 SeitenFree Physics Solved Practice Test For AFMC Pune Entrance TestMohan JaganathanNoch keine Bewertungen
- Mech 2 Lecture 4Dokument42 SeitenMech 2 Lecture 4BADR ESLAMNoch keine Bewertungen
- Dom - Sppu-7Dokument237 SeitenDom - Sppu-7Sahil MuthalNoch keine Bewertungen
- DPP 3rotation RelationbetweenTorqueMomentofinertiaDokument3 SeitenDPP 3rotation RelationbetweenTorqueMomentofinertiaBottle MasterNoch keine Bewertungen
- Problem39 36Dokument1 SeiteProblem39 36IENCSNoch keine Bewertungen
- Additional Problems On RotationDokument34 SeitenAdditional Problems On RotationJahidul HasanNoch keine Bewertungen
- SHM QuestionsDokument6 SeitenSHM QuestionsAkshit ParmarNoch keine Bewertungen
- Center of Mass Assignment (2) - 221111 - 145919Dokument3 SeitenCenter of Mass Assignment (2) - 221111 - 145919SHREYANSH RAINoch keine Bewertungen
- CH 11Dokument12 SeitenCH 11lalapwjxhhcNoch keine Bewertungen
- Problem Set 2: S S S G ADokument2 SeitenProblem Set 2: S S S G AThịnh Nguyễn vănNoch keine Bewertungen
- Physical Chemistry ExamDokument12 SeitenPhysical Chemistry ExamBreyonnaMorganNoch keine Bewertungen
- Sol Ch6 Part1Dokument4 SeitenSol Ch6 Part1Abdul Manan75% (4)
- Rotational Dynamics-08-AnswersheetDokument5 SeitenRotational Dynamics-08-AnswersheetRaju SinghNoch keine Bewertungen
- Centre of Mass - Collision - (Step-4) - JEE-22-FinalDokument6 SeitenCentre of Mass - Collision - (Step-4) - JEE-22-FinalAditya PahujaNoch keine Bewertungen
- Chapter 6 Even Answers: © 2000 by Harcourt College Publishers. All Rights ReservedDokument2 SeitenChapter 6 Even Answers: © 2000 by Harcourt College Publishers. All Rights ReservedIngrid Eliana FernandezNoch keine Bewertungen
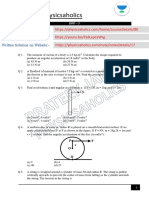
- Hysicsaholics: Video Solution On Website:-Video Solution On Youtube: - Written Solution On WebsiteDokument3 SeitenHysicsaholics: Video Solution On Website:-Video Solution On Youtube: - Written Solution On Websitesaif begNoch keine Bewertungen
- Sheet 2Dokument2 SeitenSheet 2anshul nemaNoch keine Bewertungen
- Problem27 60Dokument1 SeiteProblem27 60IENCSNoch keine Bewertungen
- Part (A) : Physics: Answer Key & SolutionDokument28 SeitenPart (A) : Physics: Answer Key & SolutionAnwesh SahaNoch keine Bewertungen
- Chap 08 Soln PDFDokument26 SeitenChap 08 Soln PDFsoma sundaramNoch keine Bewertungen
- 22-07-23 Cluster-2@99 Phase-II (X) Jee Mains Rmt-3 QPDokument19 Seiten22-07-23 Cluster-2@99 Phase-II (X) Jee Mains Rmt-3 QPzaid khanNoch keine Bewertungen
- Xi ND Phy NeetDokument7 SeitenXi ND Phy NeetDeena chemistNoch keine Bewertungen
- Physics QuestionDokument5 SeitenPhysics QuestionAlyssa ColeNoch keine Bewertungen
- Narayana IIT/NEET Academy: IndiaDokument8 SeitenNarayana IIT/NEET Academy: IndiaAtaraxNoch keine Bewertungen
- DPP-5SpringForceDokument3 SeitenDPP-5SpringForceGoutam Physicslover100% (1)
- New PhysicsDokument11 SeitenNew Physicsdamilolasukanmi20Noch keine Bewertungen
- Problem23 85Dokument1 SeiteProblem23 85IENCSNoch keine Bewertungen
- 1 DKys 1 F2 CC MCPQSN KN EyDokument4 Seiten1 DKys 1 F2 CC MCPQSN KN EyAkash SadoriyaNoch keine Bewertungen
- (20 Points: 5 Points For Each Force) Determine The Force in Members BC, JK, HI, and HJDokument6 Seiten(20 Points: 5 Points For Each Force) Determine The Force in Members BC, JK, HI, and HJAlexd10 TNoch keine Bewertungen
- Chapter 18, Solution 14.: + + Parallel To X, Y, Z With Origin at A, + + + + + +Dokument1 SeiteChapter 18, Solution 14.: + + Parallel To X, Y, Z With Origin at A, + + + + + +Mario MartinezNoch keine Bewertungen
- 21.01.24 - SR - STAR CO-SC (MODEL-A, B&C) - Jee - Main - GTM-23 (N) - FN - QPDokument11 Seiten21.01.24 - SR - STAR CO-SC (MODEL-A, B&C) - Jee - Main - GTM-23 (N) - FN - QPbhardwajparth137Noch keine Bewertungen
- Disha 32 JEE Main 2019 & 2020 Online Solved Papers Crackjee XyzDokument619 SeitenDisha 32 JEE Main 2019 & 2020 Online Solved Papers Crackjee XyzShourya Pratap SinghNoch keine Bewertungen
- Question 41Dokument7 SeitenQuestion 41Skye JabaNoch keine Bewertungen
- 26.01.23 - SR MPC (Cio& Cao) - Jee Main Model - gtm-22 - QP - An - FinalDokument18 Seiten26.01.23 - SR MPC (Cio& Cao) - Jee Main Model - gtm-22 - QP - An - FinalAnuraag KumarNoch keine Bewertungen
- Mechanical Vibrations 4600 431 Example P PDFDokument84 SeitenMechanical Vibrations 4600 431 Example P PDFWilly SusantoNoch keine Bewertungen
- Chapter 20 Sol. Bedford DinamicaDokument88 SeitenChapter 20 Sol. Bedford DinamicaOrlando Chirinos50% (2)
- TOP CHORD MEMBER and WEB MEMBER COMPUTATIONDokument3 SeitenTOP CHORD MEMBER and WEB MEMBER COMPUTATIONDarius Frane MarasiganNoch keine Bewertungen
- PHY231 Section 2, Form A March 22, 2012: S W S W TsDokument6 SeitenPHY231 Section 2, Form A March 22, 2012: S W S W TsAbhirami Novel RajNoch keine Bewertungen
- Sheet 1Dokument2 SeitenSheet 1anshul nemaNoch keine Bewertungen
- NWT - 27 Keysheet & Physics SolutionsDokument4 SeitenNWT - 27 Keysheet & Physics SolutionsArjunavarma KNoch keine Bewertungen
- 3D Modeling of Nonlinear Wave Phenomena on Shallow Water SurfacesVon Everand3D Modeling of Nonlinear Wave Phenomena on Shallow Water SurfacesNoch keine Bewertungen
- Molecular Modeling of Geochemical Reactions: An IntroductionVon EverandMolecular Modeling of Geochemical Reactions: An IntroductionJames D. KubickiNoch keine Bewertungen
- Subduction Dynamics: From Mantle Flow to Mega DisastersVon EverandSubduction Dynamics: From Mantle Flow to Mega DisastersGabriele MorraNoch keine Bewertungen
- Reviews in Computational ChemistryVon EverandReviews in Computational ChemistryAbby L. ParrillNoch keine Bewertungen
- Infrared Spectroscopy of Triatomics for Space ObservationVon EverandInfrared Spectroscopy of Triatomics for Space ObservationNoch keine Bewertungen
- Swelling Concrete in Dams and Hydraulic Structures: DSC 2017Von EverandSwelling Concrete in Dams and Hydraulic Structures: DSC 2017Noch keine Bewertungen
- Indian Institute of Technology Delhi ELL 201: Digital Electronic Circuits Laboratory Experiment 7: Sequence GeneratorDokument1 SeiteIndian Institute of Technology Delhi ELL 201: Digital Electronic Circuits Laboratory Experiment 7: Sequence GeneratorSwarnava SanyalNoch keine Bewertungen
- UntitledDokument2 SeitenUntitledSwarnava SanyalNoch keine Bewertungen
- Tutorial Sheet 7Dokument2 SeitenTutorial Sheet 7Swarnava SanyalNoch keine Bewertungen
- Liftoff TechniquesDokument4 SeitenLiftoff TechniquesSwarnava SanyalNoch keine Bewertungen
- Az Nlof2000 SeriesDokument8 SeitenAz Nlof2000 SeriesSwarnava SanyalNoch keine Bewertungen
- PMT - MCP100 - Sem 2 - 2016-17Dokument8 SeitenPMT - MCP100 - Sem 2 - 2016-17Swarnava SanyalNoch keine Bewertungen
- Indian Institute of Technology DelhiDokument1 SeiteIndian Institute of Technology DelhiSwarnava SanyalNoch keine Bewertungen
- Iisc Physics BSC Syllabus PDFDokument6 SeitenIisc Physics BSC Syllabus PDFSwarnava SanyalNoch keine Bewertungen
- 4 Orbit SolutionDokument15 Seiten4 Orbit SolutionSwarnava SanyalNoch keine Bewertungen
- AbcdDokument1 SeiteAbcdSwarnava SanyalNoch keine Bewertungen
- Exp5 - Polarization of Light PDFDokument10 SeitenExp5 - Polarization of Light PDFSwarnava SanyalNoch keine Bewertungen
- Course Content For IIT DELHIDokument2 SeitenCourse Content For IIT DELHISwarnava SanyalNoch keine Bewertungen
- Simple Machines Unit PlanDokument7 SeitenSimple Machines Unit PlanthisjimithingNoch keine Bewertungen
- (Total 1 Mark) : Hasmonean High School 1Dokument79 Seiten(Total 1 Mark) : Hasmonean High School 1dillanp15Noch keine Bewertungen
- SOP General Pycnometer InformationDokument4 SeitenSOP General Pycnometer InformationGino AlvarezNoch keine Bewertungen
- Experiment 4Dokument7 SeitenExperiment 4Sunil FranklinNoch keine Bewertungen
- E mc2 - Google SearchDokument1 SeiteE mc2 - Google Searchmbeee6ixtee01Noch keine Bewertungen
- MatematicaDokument128 SeitenMatematicaAna Carolina Nicodela Sena14% (7)
- MA02 June 2022Dokument28 SeitenMA02 June 2022Vedant DasNoch keine Bewertungen
- Sheet 1Dokument2 SeitenSheet 1masNoch keine Bewertungen
- Worksheet - M1 - AnswersDokument4 SeitenWorksheet - M1 - AnswersGhNoch keine Bewertungen
- AshaDokument58 SeitenAshaMd NazmulNoch keine Bewertungen
- Springs & Conservation of EnergyDokument2 SeitenSprings & Conservation of Energyferas.barbar06Noch keine Bewertungen
- Lecture Planner - Physics - PW Vidyapeeth School 11th JEE (Alpha)Dokument3 SeitenLecture Planner - Physics - PW Vidyapeeth School 11th JEE (Alpha)Divyanshu JethwaniNoch keine Bewertungen
- Physics 12 LabDokument3 SeitenPhysics 12 LabjaneNoch keine Bewertungen
- Chapter 8. The Steady Magnetic Field: 1. Biot-Savart LawDokument54 SeitenChapter 8. The Steady Magnetic Field: 1. Biot-Savart LawkailasNoch keine Bewertungen
- Fiitjee: Sample PaperDokument19 SeitenFiitjee: Sample PaperSoumya RoyNoch keine Bewertungen
- Statics Course NotesDokument274 SeitenStatics Course NotesSubin IdikulaNoch keine Bewertungen
- S. C. Bott Et Al - Study of The Effect of Current Rise Time On The Formation of The Precursor Column in Cylindrical Wire Array Z Pinches at 1 MADokument14 SeitenS. C. Bott Et Al - Study of The Effect of Current Rise Time On The Formation of The Precursor Column in Cylindrical Wire Array Z Pinches at 1 MACola7890Noch keine Bewertungen
- RPT Form 4 Physics 2022Dokument30 SeitenRPT Form 4 Physics 2022NoorNoch keine Bewertungen
- Experimental Determination of The Viscosity, Reported PDFDokument10 SeitenExperimental Determination of The Viscosity, Reported PDFBorin Khun AblpsuNoch keine Bewertungen
- B. Sc. Physics (H.R.K) Chapter 36: Faraday's Law of Electromagnetic InductionDokument5 SeitenB. Sc. Physics (H.R.K) Chapter 36: Faraday's Law of Electromagnetic InductionRao ShahgeerNoch keine Bewertungen
- D4and5 Coulombs Law Worksheet SOLUTIONSDokument7 SeitenD4and5 Coulombs Law Worksheet SOLUTIONSCss PursuerNoch keine Bewertungen
- SPH3U Lab Potential Energy ShelvesDokument5 SeitenSPH3U Lab Potential Energy ShelvesKelvin Mensah100% (3)
- Cambridge IGCSE: Physics 0625/22Dokument20 SeitenCambridge IGCSE: Physics 0625/22Bara' HammadehNoch keine Bewertungen
- Lesson 1: The Equivalence Principle and Tensor AnalysisDokument58 SeitenLesson 1: The Equivalence Principle and Tensor Analysissayandatta1Noch keine Bewertungen
- Comparison Between Static and Dynamic Analysis of Elevated Water TankDokument10 SeitenComparison Between Static and Dynamic Analysis of Elevated Water TankA RafiNoch keine Bewertungen