Das könnte Ihnen auch gefallen
- TD12 CompleteDokument110 SeitenTD12 Completemadina1386100% (2)
- Benefits and Limitations of Using Pictorial Drawing TechniquesDokument1 SeiteBenefits and Limitations of Using Pictorial Drawing Techniquesahmed35767% (3)
- Problem 2Dokument4 SeitenProblem 2Jade Do0% (1)
- Mechanical Properties OF Dental MaterialsDokument40 SeitenMechanical Properties OF Dental MaterialsRamnarayan MeenaNoch keine Bewertungen
- EEF467 Tutorial Sheet 2Dokument4 SeitenEEF467 Tutorial Sheet 2NK-NGAMNoch keine Bewertungen
- TUTORIAL 6 - System ResponseDokument15 SeitenTUTORIAL 6 - System ResponsetiraNoch keine Bewertungen
- Tutorial 3Dokument4 SeitenTutorial 3haiqalNoch keine Bewertungen
- Tutorial 7Dokument2 SeitenTutorial 7Gaurav ANoch keine Bewertungen
- R.M.D Engineering College (An Autonomous Institution) Ec8391 - Control System Engineering Question BankDokument6 SeitenR.M.D Engineering College (An Autonomous Institution) Ec8391 - Control System Engineering Question Bankaarthir88Noch keine Bewertungen
- Lecture I - Introduction To PID Control SystemDokument47 SeitenLecture I - Introduction To PID Control SystemR.W. SaputraNoch keine Bewertungen
- T2Dokument3 SeitenT2Kiran Jot SinghNoch keine Bewertungen
- Problem Nº1.: S G K G K S SDokument4 SeitenProblem Nº1.: S G K G K S SalexandraNoch keine Bewertungen
- Ejercicios DSCDokument39 SeitenEjercicios DSCFreyley LeyvaNoch keine Bewertungen
- Procesos de AutomatizaciónDokument9 SeitenProcesos de AutomatizaciónIsraelNoch keine Bewertungen
- Week 4 Assignment 1 SolutionDokument10 SeitenWeek 4 Assignment 1 Solutionkirankuma.jagtapNoch keine Bewertungen
- Control Theory, Tsrt09, TSRT06 Exercises & Solutions: 23 Mars 2021Dokument184 SeitenControl Theory, Tsrt09, TSRT06 Exercises & Solutions: 23 Mars 2021Adel AdenaneNoch keine Bewertungen
- AssignmentDokument12 SeitenAssignmentSamuel TanNoch keine Bewertungen
- 130403control System - Unit12Dokument4 Seiten130403control System - Unit12Nitin GoyalNoch keine Bewertungen
- EC6405-Control Systems EngineeringDokument12 SeitenEC6405-Control Systems EngineeringAnonymous XhmybK0% (1)
- Computer Science Textbook Solutions - 32Dokument7 SeitenComputer Science Textbook Solutions - 32acc-expertNoch keine Bewertungen
- Automatic Control ExerciseDokument140 SeitenAutomatic Control Exercisetaile1995Noch keine Bewertungen
- Automatic Control - ExercisesDokument140 SeitenAutomatic Control - Exerciseshasan bishNoch keine Bewertungen
- Acs 2012s2 Assn1Dokument6 SeitenAcs 2012s2 Assn1MiraelNoch keine Bewertungen
- An Introduction To Proportional-Integral-Derivative (PID) ControllersDokument47 SeitenAn Introduction To Proportional-Integral-Derivative (PID) ControllersAmar BeheraNoch keine Bewertungen
- Acs 2013s1 Assn1Dokument6 SeitenAcs 2013s1 Assn1MiraelNoch keine Bewertungen
- Exercises PrintDokument124 SeitenExercises Printusr_kotoNoch keine Bewertungen
- Control System Descriptive Type QuestionsDokument2 SeitenControl System Descriptive Type QuestionsAlka Goyal100% (1)
- QUESTION BANK of Control Systems Engineering PDFDokument12 SeitenQUESTION BANK of Control Systems Engineering PDFMouhanit LimbachiyaNoch keine Bewertungen
- Automatic Control ExercisesDokument183 SeitenAutomatic Control ExercisesFrancesco Vasturzo100% (1)
- Me2009 - Control System Technology Lab Assignment 4: Hochiminh City University of Technology Mechatronics DepartmentDokument10 SeitenMe2009 - Control System Technology Lab Assignment 4: Hochiminh City University of Technology Mechatronics DepartmentNguyễn Hồng MỹNoch keine Bewertungen
- Poles Selection TheoryDokument6 SeitenPoles Selection TheoryRao ZubairNoch keine Bewertungen
- Klausur 2021Dokument7 SeitenKlausur 2021AngelaNoch keine Bewertungen
- Midsem 21-22Dokument4 SeitenMidsem 21-22nan.sayan30Noch keine Bewertungen
- Some Past Exam Problems in Control Systems - Part 1Dokument5 SeitenSome Past Exam Problems in Control Systems - Part 1vigneshNoch keine Bewertungen
- Automatic Control Basic Course: Exercises 2021Dokument124 SeitenAutomatic Control Basic Course: Exercises 2021Duc-Duy Pham NguyenNoch keine Bewertungen
- Control Systems and Mechatronics ExamDokument4 SeitenControl Systems and Mechatronics ExamOdoch HerbertNoch keine Bewertungen
- 10 1 1 623 275 PDFDokument28 Seiten10 1 1 623 275 PDFDamir MiletaNoch keine Bewertungen
- EC - CE10 - Control Systems (2) : Test SummaryDokument18 SeitenEC - CE10 - Control Systems (2) : Test Summarysaravanababu jayapalNoch keine Bewertungen
- LDCS QuestionsDokument10 SeitenLDCS QuestionsRiya SinghNoch keine Bewertungen
- ELEN90055 Control Systems Workshop 2: Open-Loop and Closed-Loop ControlDokument11 SeitenELEN90055 Control Systems Workshop 2: Open-Loop and Closed-Loop ControlMuhammed MinhajNoch keine Bewertungen
- Experiment E. Liquid Level Control Using Coupled TanksDokument29 SeitenExperiment E. Liquid Level Control Using Coupled Tanks파랑Noch keine Bewertungen
- Control System Performance PDFDokument18 SeitenControl System Performance PDFChibueze EzeokaforNoch keine Bewertungen
- Final Exam - SampleDokument4 SeitenFinal Exam - SampleAhmed MashhoorNoch keine Bewertungen
- I & PC-Model QuestionsDokument5 SeitenI & PC-Model QuestionsSAROJ JOSHINoch keine Bewertungen
- F 0.085m3 Imin V 2.1m3. The Reaetor Has Been Operating Around A Steady CA/-i, Ss 0.925 MoleDokument6 SeitenF 0.085m3 Imin V 2.1m3. The Reaetor Has Been Operating Around A Steady CA/-i, Ss 0.925 MoleDavidNoch keine Bewertungen
- Design Problem Matlab Project TFDokument19 SeitenDesign Problem Matlab Project TFhumayun azizNoch keine Bewertungen
- CS ASS2 (13-17batch)Dokument3 SeitenCS ASS2 (13-17batch)Anonymous yO7rcec6vuNoch keine Bewertungen
- Assignment 2Dokument4 SeitenAssignment 2Keshav ChandakNoch keine Bewertungen
- Problem Set 3Dokument6 SeitenProblem Set 3VASANTHKUMAR M SNoch keine Bewertungen
- Classical Control: Proportional, Integral, Derivative (PID) ControlDokument28 SeitenClassical Control: Proportional, Integral, Derivative (PID) ControlAdil KhanNoch keine Bewertungen
- EC602 Control Q Bank 2023Dokument9 SeitenEC602 Control Q Bank 2023ROHAN CHOWDHURYNoch keine Bewertungen
- Assignment 4Dokument3 SeitenAssignment 4Zain NadeemNoch keine Bewertungen
- DC Motor PD Control To SpecificationDokument8 SeitenDC Motor PD Control To Specificationayma.tahrNoch keine Bewertungen
- Tut 1Dokument2 SeitenTut 1DECENT DECENT MUSINAINoch keine Bewertungen
- Control Systems Unitwise Important Questions Unit 1 Part ADokument10 SeitenControl Systems Unitwise Important Questions Unit 1 Part AChandra shekarNoch keine Bewertungen
- Chap5&6. HWDokument11 SeitenChap5&6. HWJesse Isaac McCallNoch keine Bewertungen
- R5411008-Digital Control SystemsDokument1 SeiteR5411008-Digital Control SystemssivabharathamurthyNoch keine Bewertungen
- Coupled TankDokument5 SeitenCoupled TankDevraj MandalNoch keine Bewertungen
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Von EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Noch keine Bewertungen
- Exercises in Electronics: Operational Amplifier CircuitsVon EverandExercises in Electronics: Operational Amplifier CircuitsBewertung: 3 von 5 Sternen3/5 (1)
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsVon EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNoch keine Bewertungen
- Fahd At-Tahiriyy Sarf Class 23Dokument16 SeitenFahd At-Tahiriyy Sarf Class 23ahmed357Noch keine Bewertungen
- Tegan 2 DatasheetDokument4 SeitenTegan 2 Datasheetahmed357Noch keine Bewertungen
- Fahd At-Tahiriyy Sarf Class 01Dokument5 SeitenFahd At-Tahiriyy Sarf Class 01ahmed357Noch keine Bewertungen
- Fahd At-Tahiriyy Sarf Class 02Dokument5 SeitenFahd At-Tahiriyy Sarf Class 02ahmed357Noch keine Bewertungen
- LV SC Case-1Dokument1 SeiteLV SC Case-1ahmed357Noch keine Bewertungen
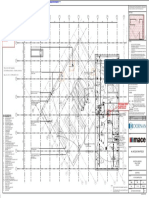
- 44lif B 6000 XX 09 DR e 630001 (C01)Dokument1 Seite44lif B 6000 XX 09 DR e 630001 (C01)ahmed357Noch keine Bewertungen
- MHbAY Ramadan Timetable 2024 1Dokument1 SeiteMHbAY Ramadan Timetable 2024 1ahmed357Noch keine Bewertungen
- City, University of London Senate Regulation 19 Assessment Regulations 2019/20Dokument69 SeitenCity, University of London Senate Regulation 19 Assessment Regulations 2019/20ahmed357Noch keine Bewertungen
- Grafton Comment NOTE 1 - Background Information Missing From DESL Drawing. DESL To Update Drawing and Resubmit For Full ReviewDokument1 SeiteGrafton Comment NOTE 1 - Background Information Missing From DESL Drawing. DESL To Update Drawing and Resubmit For Full Reviewahmed357Noch keine Bewertungen
- Risk Assessment S-RAC004 - Patrol - Internal: Form H&S: 7.2 Page 1 of 10Dokument10 SeitenRisk Assessment S-RAC004 - Patrol - Internal: Form H&S: 7.2 Page 1 of 10ahmed357Noch keine Bewertungen
- Circuitikzmanual PDFDokument172 SeitenCircuitikzmanual PDFahmed357Noch keine Bewertungen
- Coursework 2 - NEPLAN: School of Mathematics, Computer Science and EngineeringDokument11 SeitenCoursework 2 - NEPLAN: School of Mathematics, Computer Science and Engineeringahmed357Noch keine Bewertungen
- Enforcing The N-1 Criterion in Power Transmission Networks:: An Analysis of A Theoretical ModelDokument49 SeitenEnforcing The N-1 Criterion in Power Transmission Networks:: An Analysis of A Theoretical Modelahmed357Noch keine Bewertungen
- Notes Al Ajrumiyyah SharhDokument9 SeitenNotes Al Ajrumiyyah Sharhahmed357Noch keine Bewertungen
- At Tayaamun in Wearing Clothes and Other Similar ActionsDokument23 SeitenAt Tayaamun in Wearing Clothes and Other Similar Actionsahmed357Noch keine Bewertungen
- Phone: 020 7326 4098 I NF O@Br I XT Onmas J I D. C O. Uk Uk Char I T Y Number: 1064768Dokument2 SeitenPhone: 020 7326 4098 I NF O@Br I XT Onmas J I D. C O. Uk Uk Char I T Y Number: 1064768ahmed357Noch keine Bewertungen
- Unit10 Ass 1 Orthographic Projection (GN)Dokument7 SeitenUnit10 Ass 1 Orthographic Projection (GN)ahmed357100% (1)
- Pcs 0626Dokument11 SeitenPcs 0626Diêm Công ViệtNoch keine Bewertungen
- Beyond The Pole-Barn Paradox (Paper 64) PDFDokument7 SeitenBeyond The Pole-Barn Paradox (Paper 64) PDFSambit PandaNoch keine Bewertungen
- Guidelines On Good Laboratory Practice in Pesticide Residue Analysis CAC/GL 40-1993 ContentDokument36 SeitenGuidelines On Good Laboratory Practice in Pesticide Residue Analysis CAC/GL 40-1993 ContentVishal AroraNoch keine Bewertungen
- Alexandre Grothendieck (1928-2014) Germany, FranceDokument13 SeitenAlexandre Grothendieck (1928-2014) Germany, FranceDer CruzNoch keine Bewertungen
- Osmosis LabDokument3 SeitenOsmosis LabMutuluShakurNoch keine Bewertungen
- Iec STD ListsDokument6 SeitenIec STD Listssasenthil241464Noch keine Bewertungen
- Force Relations and Dynamics of Cutting Knife in A Vertical Disc Mobile Wood Chipper - Leonardo El J Pract TechnolDokument14 SeitenForce Relations and Dynamics of Cutting Knife in A Vertical Disc Mobile Wood Chipper - Leonardo El J Pract TechnolNguyenHuanNoch keine Bewertungen
- Manual of Metal Bellows - 0441e S 56-77!2!04!10!20 - WebDokument11 SeitenManual of Metal Bellows - 0441e S 56-77!2!04!10!20 - Webadfafad gfadfNoch keine Bewertungen
- Cambridge IGCSE (9-1) : Physics 0972/11Dokument20 SeitenCambridge IGCSE (9-1) : Physics 0972/11michael nanlohyNoch keine Bewertungen
- 4 Hydrates & Hydrate PreventionDokument26 Seiten4 Hydrates & Hydrate PreventionWael Badri100% (1)
- Speedy OPT Math 10Dokument94 SeitenSpeedy OPT Math 10Sumit ShahNoch keine Bewertungen
- Asadur RahmanDokument48 SeitenAsadur Rahmanah waNoch keine Bewertungen
- 5.2 Production Facilities PDFDokument110 Seiten5.2 Production Facilities PDFJohn Cooper100% (5)
- Fisika ModernDokument79 SeitenFisika ModernEndah RahmawatiNoch keine Bewertungen
- KISSsoft Calculation Programs For Machine DesignDokument22 SeitenKISSsoft Calculation Programs For Machine DesignAbhijeet DeshmukhNoch keine Bewertungen
- Gli55 User ManualDokument126 SeitenGli55 User Manualcvkkkk1Noch keine Bewertungen
- Chapter 7 Powerpoint 1225339266570076 9Dokument24 SeitenChapter 7 Powerpoint 1225339266570076 9venkateshyadav2116Noch keine Bewertungen
- The Artist and The Mathematician - Amir AczelDokument170 SeitenThe Artist and The Mathematician - Amir AczelKike García Manyari100% (2)
- GP335 SHDokument200 SeitenGP335 SHJ.RamboNoch keine Bewertungen
- Gravitational Shielding: Tests of The Equivalence PrincipleDokument3 SeitenGravitational Shielding: Tests of The Equivalence Principlesigne.soderstrom1785Noch keine Bewertungen
- Liebherr STS Ship To Shore Container Gantry Cranes Technical Description 12469-0Dokument4 SeitenLiebherr STS Ship To Shore Container Gantry Cranes Technical Description 12469-0sheron100% (2)
- Bryton Williamson - Percent - Composition PracticeDokument2 SeitenBryton Williamson - Percent - Composition PracticeBryton WilliamsonNoch keine Bewertungen
- Report TextDokument2 SeitenReport Textsusila10Noch keine Bewertungen
- UNIT 1 PP UNIT 1 Math IntroDokument64 SeitenUNIT 1 PP UNIT 1 Math IntroHlulani MacksonNoch keine Bewertungen
- 1st Grading Performance TestDokument4 Seiten1st Grading Performance TestMary Ann GellorExito EvarolaNoch keine Bewertungen
- Thermodynamic Optimization of A Trigeneration System Based On Biomass CombustionDokument9 SeitenThermodynamic Optimization of A Trigeneration System Based On Biomass CombustionTiago HenriquesNoch keine Bewertungen
- Mechanics of Solids Lab ManualDokument47 SeitenMechanics of Solids Lab Manualravi03319100% (1)
- Earthquake Research and Analysis - Seismology, Seismotectonic and Earthquake GeologyDokument416 SeitenEarthquake Research and Analysis - Seismology, Seismotectonic and Earthquake GeologyMiguel TorresNoch keine Bewertungen