Das könnte Ihnen auch gefallen
- 1337 Tele ComplectDokument6 Seiten1337 Tele Complectborislav borisovNoch keine Bewertungen
- 19 Exercise IEC61850 E SWDokument21 Seiten19 Exercise IEC61850 E SWlephuonganh_2001Noch keine Bewertungen
- Co4011B-Fl: Single Chip Canopen Controller For Remote I/ODokument45 SeitenCo4011B-Fl: Single Chip Canopen Controller For Remote I/OKrum KashavarovNoch keine Bewertungen
- LIOB 150/151/152/153/154: LIOB FT I/ O ModuleDokument2 SeitenLIOB 150/151/152/153/154: LIOB FT I/ O ModuleGuillermo Andres García MoraNoch keine Bewertungen
- 1SXU172024L0201 PlutoD20Dokument2 Seiten1SXU172024L0201 PlutoD20FaizFzNoch keine Bewertungen
- Motion Coordinator: Quick Connection GuideDokument8 SeitenMotion Coordinator: Quick Connection GuidethehanhctmNoch keine Bewertungen
- Atf1508 PDFDokument31 SeitenAtf1508 PDFPhong DoNoch keine Bewertungen
- Digital I/O Programming Using PPIDokument5 SeitenDigital I/O Programming Using PPIعسم ساماNoch keine Bewertungen
- Color TV: Service ManualDokument56 SeitenColor TV: Service ManualAndré LeftNoch keine Bewertungen
- Alsa EXCELL 350MCD User ManualDokument30 SeitenAlsa EXCELL 350MCD User Manualmario sotomayor0% (1)
- IOFirebug Engine For Universal Robots Datasheet EnglishDokument2 SeitenIOFirebug Engine For Universal Robots Datasheet EnglishMatic DražnikNoch keine Bewertungen
- ATF2500C CPLD Family Datasheet ATF2500C: FeaturesDokument24 SeitenATF2500C CPLD Family Datasheet ATF2500C: FeaturesAngel PardinesNoch keine Bewertungen
- ATF2500C CPLD Family Datasheet ATF2500C: FeaturesDokument9 SeitenATF2500C CPLD Family Datasheet ATF2500C: FeaturesSolikin AjNoch keine Bewertungen
- Amplificador e Receiver para Som Ambiente Com 480w Rms em 4 Ohms Slim4500app FrahmDokument8 SeitenAmplificador e Receiver para Som Ambiente Com 480w Rms em 4 Ohms Slim4500app FrahmYamil Miler Mironés PlataNoch keine Bewertungen
- Chapter 02 Programmable Logic DeviceDokument12 SeitenChapter 02 Programmable Logic DeviceNguyen Yen NhiNoch keine Bewertungen
- Chapter - 02 - Programmable Logic Device - PDFDokument12 SeitenChapter - 02 - Programmable Logic Device - PDFnguyen kietNoch keine Bewertungen
- LM321Dokument16 SeitenLM32121Noch keine Bewertungen
- Modulo Entrada e SaídaDokument5 SeitenModulo Entrada e Saídaalphons3Noch keine Bewertungen
- Alsa Excell 400 - User Manual PDFDokument30 SeitenAlsa Excell 400 - User Manual PDFAyaovi JorlauNoch keine Bewertungen
- EN FANOXTD DATA SIA OCEFSecondaryDist SIAF R06Dokument7 SeitenEN FANOXTD DATA SIA OCEFSecondaryDist SIAF R06Alexandre MorenoNoch keine Bewertungen
- LC700 Overview March2000 EaiDokument101 SeitenLC700 Overview March2000 EaiCezardeBarrosNoch keine Bewertungen
- OP196Dokument16 SeitenOP196Océane SavaryNoch keine Bewertungen
- S01M07ed2 Monitoring FunctionsDokument16 SeitenS01M07ed2 Monitoring FunctionsOtto KampbeltNoch keine Bewertungen
- Broc Scalers US v3 1Dokument4 SeitenBroc Scalers US v3 1Fernando TeixeiraNoch keine Bewertungen
- Programming The AVR-Switches and SSDDokument12 SeitenProgramming The AVR-Switches and SSDNdumiso MtshaliNoch keine Bewertungen
- Dual/Quad Rail-to-Rail Operational Amplifiers OP295/OP495: Features Pin ConfigurationsDokument16 SeitenDual/Quad Rail-to-Rail Operational Amplifiers OP295/OP495: Features Pin Configurationsabc1000Noch keine Bewertungen
- CMOS Single-Supply Rail-to-Rail Input/Output Operational Amplifiers OP250/OP450Dokument16 SeitenCMOS Single-Supply Rail-to-Rail Input/Output Operational Amplifiers OP250/OP450ntsvcgNoch keine Bewertungen
- C-Bus Eight and Twelve Channel Voltage Free Relay: Installation InstructionsDokument16 SeitenC-Bus Eight and Twelve Channel Voltage Free Relay: Installation Instructionsfreddysh4330Noch keine Bewertungen
- D V B S R B H P S C M: Ivaylo Mashev, Nikolay Kakanakov, Dimitar GrozevDokument6 SeitenD V B S R B H P S C M: Ivaylo Mashev, Nikolay Kakanakov, Dimitar GrozevSALAH NETNoch keine Bewertungen
- 1593767037565-UFSBI and Its Applications Presentation - FINAL - S GHOSH - ECR - WEB PresentDokument87 Seiten1593767037565-UFSBI and Its Applications Presentation - FINAL - S GHOSH - ECR - WEB PresentNaresh KumarNoch keine Bewertungen
- Data Sheet: 3-Wire Disconnector Drive Control ModuleDokument12 SeitenData Sheet: 3-Wire Disconnector Drive Control ModuleConstantin NinovNoch keine Bewertungen
- Diagrama SiennaDokument18 SeitenDiagrama SiennaAchinga AquelachingaNoch keine Bewertungen
- 4 Pole Capacitor Application Note: - Connection ADokument4 Seiten4 Pole Capacitor Application Note: - Connection AJawadNoch keine Bewertungen
- HI-8585, HI-8586: Description Pin ConfigurationDokument9 SeitenHI-8585, HI-8586: Description Pin ConfigurationVasya PetrovaNoch keine Bewertungen
- Digital Speaker Processor: User ManualDokument27 SeitenDigital Speaker Processor: User ManualAnderson SoaresNoch keine Bewertungen
- Spec Catalogue Frauscher v1Dokument5 SeitenSpec Catalogue Frauscher v1Taufik RachmanNoch keine Bewertungen
- Operational Amplifier Pspice Model of 8-Bit Pic MicrocontrollersDokument18 SeitenOperational Amplifier Pspice Model of 8-Bit Pic MicrocontrollersJune Anthony AsistioNoch keine Bewertungen
- High Efficiency, Main Power Supply Controller For Notebook ComputersDokument24 SeitenHigh Efficiency, Main Power Supply Controller For Notebook Computersjohn doewrNoch keine Bewertungen
- Labo K Effects Neve V Racking Kit enDokument12 SeitenLabo K Effects Neve V Racking Kit enshakimNoch keine Bewertungen
- MP & MC Module-4Dokument72 SeitenMP & MC Module-4jeezNoch keine Bewertungen
- Engince Control CircuitsDokument12 SeitenEngince Control Circuitsferas alkassmNoch keine Bewertungen
- ORI001102 CDMA WLL BTS3612 Hardware System ISSUE3.0Dokument69 SeitenORI001102 CDMA WLL BTS3612 Hardware System ISSUE3.0api-19974739Noch keine Bewertungen
- TC78H660FNG Datasheet en 20200908Dokument26 SeitenTC78H660FNG Datasheet en 20200908rfidguysNoch keine Bewertungen
- SD130 - Ground DistributionDokument5 SeitenSD130 - Ground Distributionjanuar1983Noch keine Bewertungen
- схемыDokument23 SeitenсхемыhaileNoch keine Bewertungen
- Data Sheet: HEF40244B BuffersDokument6 SeitenData Sheet: HEF40244B BuffersvanmarteNoch keine Bewertungen
- Data Sheet: HEF40244B BuffersDokument6 SeitenData Sheet: HEF40244B BuffersDaniel Norberto DemariaNoch keine Bewertungen
- Datasheet PDFDokument16 SeitenDatasheet PDFrahulNoch keine Bewertungen
- Mitsubishi Motors: Service ManualDokument22 SeitenMitsubishi Motors: Service ManualALEJANDRONoch keine Bewertungen
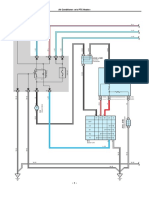
- Air Conditioner : J18 (A), J19 (B)Dokument5 SeitenAir Conditioner : J18 (A), J19 (B)JOSENoch keine Bewertungen
- Op 291Dokument20 SeitenOp 291api-3825669Noch keine Bewertungen
- 65 LS 600h L / LS 600h (From Nov. 2009 Production) : Power Trunk LidDokument1 Seite65 LS 600h L / LS 600h (From Nov. 2009 Production) : Power Trunk LidWaleed AlshgaaaNoch keine Bewertungen
- Diagrama Hcd-gtr33 Gtr55 Gtr77Dokument16 SeitenDiagrama Hcd-gtr33 Gtr55 Gtr77milton6grober6barr6nNoch keine Bewertungen
- ATF22V10C DatasheetDokument22 SeitenATF22V10C DatasheetfreeeflyerNoch keine Bewertungen
- DatasheetDokument6 SeitenDatasheetStuxnetNoch keine Bewertungen
- Wiring-Schematic PAVIRODokument4 SeitenWiring-Schematic PAVIROraheelnekwareNoch keine Bewertungen
- 700BT DS 20220826Dokument28 Seiten700BT DS 20220826Reyna SafillaNoch keine Bewertungen
- Catalogue 20control 20valves 20ENDokument48 SeitenCatalogue 20control 20valves 20ENhoanNoch keine Bewertungen
- The 8255A: Programmable Peripheral Interface: Ee309: Computer Organization, Architecture and MicroprocessorsDokument5 SeitenThe 8255A: Programmable Peripheral Interface: Ee309: Computer Organization, Architecture and MicroprocessorsSahil .S.PawarNoch keine Bewertungen
- TC Calibration ProtocolDokument1 SeiteTC Calibration ProtocolsuhailjafriNoch keine Bewertungen
- Sootopt: Real-Time Global Sootblowing ManagementDokument2 SeitenSootopt: Real-Time Global Sootblowing ManagementsuhailjafriNoch keine Bewertungen
- Ues: An Optimization Software Package For Power & Energy: Infoenergo 2004Dokument6 SeitenUes: An Optimization Software Package For Power & Energy: Infoenergo 2004suhailjafriNoch keine Bewertungen
- LTDokument1 SeiteLTsuhailjafriNoch keine Bewertungen
- Rich Text Efbhfdbhfdhditor FileDokument1 SeiteRich Text Efbhfdbhfdhditor FilesuhailjafriNoch keine Bewertungen
- Sales Engineer Valves - JDDokument1 SeiteSales Engineer Valves - JDsuhailjafriNoch keine Bewertungen
- The Flying Ring: Prof. Rod BeresfordDokument12 SeitenThe Flying Ring: Prof. Rod BeresfordsuhailjafriNoch keine Bewertungen
- Entech ControlsDokument12 SeitenEntech Controlsmanmohansingh1999Noch keine Bewertungen
- Power Electronics & SCRDokument55 SeitenPower Electronics & SCRsoumyaranjan_kar34Noch keine Bewertungen
- Sliding Sleeve - WikipediaDokument7 SeitenSliding Sleeve - Wikipediawilliam MadingNoch keine Bewertungen
- 3512 Diag - Engine - 1243-06 - SisDokument8 Seiten3512 Diag - Engine - 1243-06 - Sisshashank715Noch keine Bewertungen
- ltc1760 Dual Smart Battery System ManagerDokument48 Seitenltc1760 Dual Smart Battery System ManagerBig BoyNoch keine Bewertungen
- Haibike EBike Owner's Manual 2014Dokument82 SeitenHaibike EBike Owner's Manual 2014Yotta ByteNoch keine Bewertungen
- Pro9500 PCDokument34 SeitenPro9500 PCJonssonsNoch keine Bewertungen
- Smart String Inverter: Efficient Safe Reliable SmartDokument2 SeitenSmart String Inverter: Efficient Safe Reliable SmartRamon OrellanaNoch keine Bewertungen
- Weld&Fold - Taping Machine - Noso MX 210: Heat Has Never Been SoDokument2 SeitenWeld&Fold - Taping Machine - Noso MX 210: Heat Has Never Been SoLeydi Nathaly Sanchez BastidasNoch keine Bewertungen
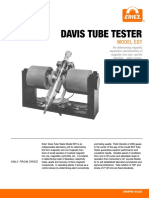
- Davis Tube TesterDokument2 SeitenDavis Tube TesterCV Dharma UtamaNoch keine Bewertungen
- NMS1217-Plus-neon SPI&DMX512) Specification-A02Dokument10 SeitenNMS1217-Plus-neon SPI&DMX512) Specification-A02SALV2049Noch keine Bewertungen
- 006 - Efisystem 7 Ke PDFDokument77 Seiten006 - Efisystem 7 Ke PDFJokoNoch keine Bewertungen
- Types of MemoryDokument3 SeitenTypes of MemoryVenkatareddy Mula0% (1)
- 5247 Dieselmax Tier 2 TC IPUDokument4 Seiten5247 Dieselmax Tier 2 TC IPUGuillermo Pablo ColladoNoch keine Bewertungen
- 789 - 9ZCDokument47 Seiten789 - 9ZCNY DanyNoch keine Bewertungen
- And Power in Full Subtractor Circuit: Transistor Gating: Reduction of Leakage CurrentDokument11 SeitenAnd Power in Full Subtractor Circuit: Transistor Gating: Reduction of Leakage CurrentBhupender KumawatNoch keine Bewertungen
- Altivar Process ATV900 - VW3A7742Dokument5 SeitenAltivar Process ATV900 - VW3A7742Lucia TrifanNoch keine Bewertungen
- CH 30Dokument41 SeitenCH 30Antonio CorteNoch keine Bewertungen
- Section 4f - 5 in Big John Hydraulic JarDokument11 SeitenSection 4f - 5 in Big John Hydraulic JarDenier RubianoNoch keine Bewertungen
- Despiece Hidrojet K310 1.994-680.0 PDFDokument12 SeitenDespiece Hidrojet K310 1.994-680.0 PDFjose velascoNoch keine Bewertungen
- Ict 7 Week 2Dokument28 SeitenIct 7 Week 2Jhan G CalateNoch keine Bewertungen
- Rubrics in IroningDokument1 SeiteRubrics in IroningJONALYN GASPARNoch keine Bewertungen
- Delta Ia-Plc As C en 20210916Dokument56 SeitenDelta Ia-Plc As C en 20210916Diana Amaya NatividadNoch keine Bewertungen
- VNHD7008AY: H-Bridge Motor Driver For Automotive DC Motor DrivingDokument44 SeitenVNHD7008AY: H-Bridge Motor Driver For Automotive DC Motor DrivingFırat Dede (Robotus)Noch keine Bewertungen
- Manson SDCDokument1 SeiteManson SDCrujanacNoch keine Bewertungen
- Harman Kardon hs300 SM PDFDokument109 SeitenHarman Kardon hs300 SM PDFboroda2410Noch keine Bewertungen
- Experiments W Spiral Magnet Motors Wankel WholeDokument46 SeitenExperiments W Spiral Magnet Motors Wankel Wholetony74193100% (1)
- Gemini-BPM500 PreampDokument12 SeitenGemini-BPM500 PreampAristoteles CarreñoNoch keine Bewertungen
- b5 Vacuum Hose Diagram - PassatDokument3 Seitenb5 Vacuum Hose Diagram - Passatjackass_tNoch keine Bewertungen
- NEC - 2008 - Table 110Dokument1 SeiteNEC - 2008 - Table 110Jaime CarcamoNoch keine Bewertungen