Das könnte Ihnen auch gefallen
- Electronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1Von EverandElectronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1Noch keine Bewertungen
- Classification of ComputersDokument2 SeitenClassification of Computerseduardo acuniaNoch keine Bewertungen
- p6 Case Study ModifiedDokument109 Seitenp6 Case Study Modifieddreamboy87100% (2)
- Linear Network Theory: The Commonwealth and International Library: Applied Electricity and Electronics DivisionVon EverandLinear Network Theory: The Commonwealth and International Library: Applied Electricity and Electronics DivisionNoch keine Bewertungen
- Unit 18 Part IDokument23 SeitenUnit 18 Part IJorge FrancoNoch keine Bewertungen
- Best of BangaloreDokument283 SeitenBest of Bangaloresven100% (5)
- Linda Raschke's 50 Time-Tested Trading RulesDokument4 SeitenLinda Raschke's 50 Time-Tested Trading RulesISB3 333100% (1)
- Twisted Pair Transmission Line Distributed Parametrs PDFDokument8 SeitenTwisted Pair Transmission Line Distributed Parametrs PDF임광식0% (1)
- Impact Force CalculationDokument3 SeitenImpact Force CalculationphamvanlaiNoch keine Bewertungen
- Clocks, Watches & Scientific Instruments - Skinner Auction 2760MDokument132 SeitenClocks, Watches & Scientific Instruments - Skinner Auction 2760MSkinnerAuctions100% (2)
- Walpole Ch01Dokument31 SeitenWalpole Ch01Fadi MahfouzNoch keine Bewertungen
- Application of Matrix Methods To The Solution of Travelling-Wave Phenomena in Polyphase SystemsDokument13 SeitenApplication of Matrix Methods To The Solution of Travelling-Wave Phenomena in Polyphase SystemsKunal RajaNoch keine Bewertungen
- Transmission Line Modeling of Grounding Electrodes and Calculation of Their Effective Length Under Impulse ExcitationDokument6 SeitenTransmission Line Modeling of Grounding Electrodes and Calculation of Their Effective Length Under Impulse ExcitationLaila JanNoch keine Bewertungen
- Planning For Big Data PDFDokument88 SeitenPlanning For Big Data PDFexelius100% (1)
- Contact Resistance - EE 432/532 1Dokument11 SeitenContact Resistance - EE 432/532 1jerryliaoNoch keine Bewertungen
- A Minimal Spanning Tree Algorithm For Distribution Networks ConfigurationDokument7 SeitenA Minimal Spanning Tree Algorithm For Distribution Networks ConfigurationpanggahNoch keine Bewertungen
- Maxwell Equations and Physical Interpretation of Each of Them in Differential and Integral FormsDokument23 SeitenMaxwell Equations and Physical Interpretation of Each of Them in Differential and Integral FormsClara VelezNoch keine Bewertungen
- Realization of Absolute Phase and AC Resistance of Current Shunts by Ratio MeasurementsDokument6 SeitenRealization of Absolute Phase and AC Resistance of Current Shunts by Ratio MeasurementsZadar BoutiqueNoch keine Bewertungen
- Globecom 2006Dokument6 SeitenGlobecom 2006Theodoros TsiftsisNoch keine Bewertungen
- Determining The Characteristic of A Coaxial LineDokument13 SeitenDetermining The Characteristic of A Coaxial Linesarkar salamNoch keine Bewertungen
- Z MatchDokument10 SeitenZ Matchbayman66Noch keine Bewertungen
- Ece V Microwaves and Radar 10ec54 SolutionDokument77 SeitenEce V Microwaves and Radar 10ec54 SolutionmansourvcxNoch keine Bewertungen
- Effect of Single Phase To Ground Fault With Arc Resistance On The Performance of Distance RelayDokument5 SeitenEffect of Single Phase To Ground Fault With Arc Resistance On The Performance of Distance RelayandredNoch keine Bewertungen
- Power Allocation For OFDM-Based Cooperative Relay SystemsDokument7 SeitenPower Allocation For OFDM-Based Cooperative Relay SystemsvictorwuNoch keine Bewertungen
- ASEE 2015 PowerXTransLine FinalDokument14 SeitenASEE 2015 PowerXTransLine FinalAshraf IrfanNoch keine Bewertungen
- Low Entanglement WavefunctionsDokument14 SeitenLow Entanglement WavefunctionsVida Faith GalvezNoch keine Bewertungen
- Gropu 7 Lab 3.Dokument13 SeitenGropu 7 Lab 3.Christabel AgulueNoch keine Bewertungen
- Error Rate Performance in OFDM-based Cooperative NetworksDokument5 SeitenError Rate Performance in OFDM-based Cooperative NetworksvictorwuNoch keine Bewertungen
- The Variation of The Attenuation Constant of Low-Loss Transmission Lines in The Presence of Standing WavesDokument4 SeitenThe Variation of The Attenuation Constant of Low-Loss Transmission Lines in The Presence of Standing WavesjessaNoch keine Bewertungen
- Fast Approximate Energy Minimization Via Graph CutsDokument18 SeitenFast Approximate Energy Minimization Via Graph Cutskarnati87Noch keine Bewertungen
- Fast Distributed Reactive Power Control For Voltage Regulation in Distribution NetworksDokument4 SeitenFast Distributed Reactive Power Control For Voltage Regulation in Distribution NetworksRianti TampubolonNoch keine Bewertungen
- Main Paper PDFDokument22 SeitenMain Paper PDFRevanth VennuNoch keine Bewertungen
- Kirchhoff's Voltage Law Corrected For Radiating Circuits: Vitor Lara, Kaled DechoumDokument5 SeitenKirchhoff's Voltage Law Corrected For Radiating Circuits: Vitor Lara, Kaled Dechoumjessicakh aNoch keine Bewertungen
- Landauer Buttiker Formalism PDFDokument15 SeitenLandauer Buttiker Formalism PDFJacobNoch keine Bewertungen
- Hopping Conduction in Semiconductors and PercolationDokument10 SeitenHopping Conduction in Semiconductors and PercolationAayusNoch keine Bewertungen
- Optimum Dynamic Distribution Network Reconfiguration Using Minimum Spanning Tree AlgorithmDokument6 SeitenOptimum Dynamic Distribution Network Reconfiguration Using Minimum Spanning Tree AlgorithmdimasfupNoch keine Bewertungen
- Exponential Decay and Lack of Analyticity For The System of The Kirchhoff-Love Plates and Membrane-Like Electric Network Equation With Fractional Partial DampingDokument17 SeitenExponential Decay and Lack of Analyticity For The System of The Kirchhoff-Love Plates and Membrane-Like Electric Network Equation With Fractional Partial DampingGaston GBNoch keine Bewertungen
- MHMD 2Dokument16 SeitenMHMD 2mohammed alshaerNoch keine Bewertungen
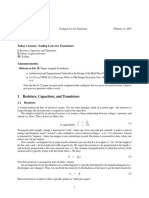
- 1 Resistors, Capacitors, and Transistors: Today's Lecture: Scaling Laws For TransistorsDokument9 Seiten1 Resistors, Capacitors, and Transistors: Today's Lecture: Scaling Laws For TransistorsJosephBrianBang-ngitNoch keine Bewertungen
- 06 C Measurement 2Dokument15 Seiten06 C Measurement 2Awais MohammedNoch keine Bewertungen
- Theoretical and Experimental Determination of Cell Constants of Planar-Interdigitated Electrolyte Conductivity SensorsDokument5 SeitenTheoretical and Experimental Determination of Cell Constants of Planar-Interdigitated Electrolyte Conductivity SensorsKristineNoch keine Bewertungen
- FulltextDokument10 SeitenFulltextapi-3722417Noch keine Bewertungen
- Current Electricity McqsDokument31 SeitenCurrent Electricity McqsM.Tharun KumarNoch keine Bewertungen
- 03.2003 IJNME OptimDokument20 Seiten03.2003 IJNME Optimkristian.krabbenhoft1463Noch keine Bewertungen
- Tonika Routing AlgorithmDokument21 SeitenTonika Routing Algorithmanon_206920Noch keine Bewertungen
- Waveguides PDFDokument3 SeitenWaveguides PDFmenguemengueNoch keine Bewertungen
- Low Power CMOS Rectifier Design For RFID ApllicationsDokument13 SeitenLow Power CMOS Rectifier Design For RFID ApllicationsNgô Văn ĐứcNoch keine Bewertungen
- Differential PreotectionDokument5 SeitenDifferential Preotectionmabdou207Noch keine Bewertungen
- Resistor Network Aproach EITDokument55 SeitenResistor Network Aproach EITjorgeluis.unknownman667Noch keine Bewertungen
- Wireless Power Transfer Via Strongly Coupled Magnetic Resonances PDFDokument5 SeitenWireless Power Transfer Via Strongly Coupled Magnetic Resonances PDFChandraNoch keine Bewertungen
- Near Field Coupling With Small RFID ObjectsDokument5 SeitenNear Field Coupling With Small RFID ObjectsDuc DucNoch keine Bewertungen
- DWT MatlabDokument5 SeitenDWT Matlabmehdi_torabnejadNoch keine Bewertungen
- Eca Lec-8Dokument19 SeitenEca Lec-8adi2notopNoch keine Bewertungen
- Equivalent Series Resistance (ESR) of CapacitorsDokument4 SeitenEquivalent Series Resistance (ESR) of CapacitorsPadmajan YesodharanNoch keine Bewertungen
- Wireless Power Transfer Literature Review by Naters BishDokument15 SeitenWireless Power Transfer Literature Review by Naters BishNaters BishNoch keine Bewertungen
- Simple Matching Networks - TutorialDokument3 SeitenSimple Matching Networks - TutorialJarfoNoch keine Bewertungen
- Exponential TaperedDokument5 SeitenExponential TaperedEdgard YemelongNoch keine Bewertungen
- Fractional Order and Fractal Modelling of Electrical Networks O. Enacheanu, D. Riu, N. RetièreDokument6 SeitenFractional Order and Fractal Modelling of Electrical Networks O. Enacheanu, D. Riu, N. RetièreVignesh RamakrishnanNoch keine Bewertungen
- Transmission Lines Notes FMDokument12 SeitenTransmission Lines Notes FMlamontfreemannNoch keine Bewertungen
- Delftship Acc LLDokument16 SeitenDelftship Acc LLirfan maulaNoch keine Bewertungen
- ACES Journal January 2019 Paper 6Dokument6 SeitenACES Journal January 2019 Paper 6asif hameedNoch keine Bewertungen
- Electronic Design Ebook - Back To Basics - Impedance MatchingDokument24 SeitenElectronic Design Ebook - Back To Basics - Impedance Matchingaj7scribdNoch keine Bewertungen
- Thnsistor Sizing For Minimization of Energy-Delay ProductDokument6 SeitenThnsistor Sizing For Minimization of Energy-Delay Productdxtry123Noch keine Bewertungen
- Network Model of The Constant Phase Element: A Project ByDokument11 SeitenNetwork Model of The Constant Phase Element: A Project ByShreyas BhandareNoch keine Bewertungen
- EE668: Modeling of Interconnect (Wires) in VLSI Systems: 1 R, L, C ModelsDokument4 SeitenEE668: Modeling of Interconnect (Wires) in VLSI Systems: 1 R, L, C ModelsChiquita WhiteNoch keine Bewertungen
- Genetic Algorithm For Energy-Efficient Qos Multicast RoutingDokument4 SeitenGenetic Algorithm For Energy-Efficient Qos Multicast RoutingNYIRIKUTONoch keine Bewertungen
- Landauer Buttiker Formalism PDFDokument15 SeitenLandauer Buttiker Formalism PDFSunilkumar PattnayakNoch keine Bewertungen
- Matching HistoryDokument9 SeitenMatching Historynag380Noch keine Bewertungen
- Theory 11625041162504Dokument6 SeitenTheory 11625041162504Anonymous rD1KcPG98Noch keine Bewertungen
- Risks and Risk Mitigation in Geothermal Development: Paul K. NgugiDokument11 SeitenRisks and Risk Mitigation in Geothermal Development: Paul K. Ngugimayalasan1Noch keine Bewertungen
- Quantifying Risk in Geothermal Development - High Enthalpy and Low Enthalpy CasesDokument7 SeitenQuantifying Risk in Geothermal Development - High Enthalpy and Low Enthalpy Casesmayalasan1Noch keine Bewertungen
- Unu GTP 2017 02Dokument71 SeitenUnu GTP 2017 02mayalasan1Noch keine Bewertungen
- Preliminary Technical Risk Analysis For The Geothermal Technologies ProgramDokument107 SeitenPreliminary Technical Risk Analysis For The Geothermal Technologies Programmayalasan1Noch keine Bewertungen
- Well Integrity Risk Assessment in Geothermal Wells - Status of TodayDokument93 SeitenWell Integrity Risk Assessment in Geothermal Wells - Status of Todaymayalasan1Noch keine Bewertungen
- ESMAP Paris Geothermal Energy KEF OptimizedDokument19 SeitenESMAP Paris Geothermal Energy KEF Optimizedmayalasan1Noch keine Bewertungen
- Characterization of The Wind Power Resource in Europe and Its IntermittencyDokument9 SeitenCharacterization of The Wind Power Resource in Europe and Its Intermittencymayalasan1Noch keine Bewertungen
- Development of A Cost-Effective, Smart Early Warning System For Improving The Reliability of Electrical SubstationsDokument5 SeitenDevelopment of A Cost-Effective, Smart Early Warning System For Improving The Reliability of Electrical Substationsmayalasan1Noch keine Bewertungen
- A Time-Complementarity Index For Multiple Energy Sources Based On Power Availability FunctionsDokument7 SeitenA Time-Complementarity Index For Multiple Energy Sources Based On Power Availability Functionsmayalasan1Noch keine Bewertungen
- Evolution of Production and The Efficient Location of Renewable Energies. The Case of ChinaDokument10 SeitenEvolution of Production and The Efficient Location of Renewable Energies. The Case of Chinamayalasan1Noch keine Bewertungen
- On The Definition of Cyber - Physical Resilience in Power SystemsDokument22 SeitenOn The Definition of Cyber - Physical Resilience in Power Systemsmayalasan1Noch keine Bewertungen
- Complementarity Maps of Wind and Solar Energy Resources For Rio Grande Do Sul, BrazilDokument17 SeitenComplementarity Maps of Wind and Solar Energy Resources For Rio Grande Do Sul, Brazilmayalasan1Noch keine Bewertungen
- An Early Warning and Security Countermeasure (EWSC) System For Electric Power Control CentersDokument21 SeitenAn Early Warning and Security Countermeasure (EWSC) System For Electric Power Control Centersmayalasan1Noch keine Bewertungen
- Resilience Metrics For The Electric Power System: A Performance-Based ApproachDokument49 SeitenResilience Metrics For The Electric Power System: A Performance-Based Approachmayalasan1Noch keine Bewertungen
- Complex Network Analysis of Brazilian Power Grid: G. C. Martins, L. S. Oliveira, F. L. Ribeiro and F. L. ForgeriniDokument7 SeitenComplex Network Analysis of Brazilian Power Grid: G. C. Martins, L. S. Oliveira, F. L. Ribeiro and F. L. Forgerinimayalasan1Noch keine Bewertungen
- Meeting: Improving Power System Resilience in The 21 CenturyDokument12 SeitenMeeting: Improving Power System Resilience in The 21 Centurymayalasan1Noch keine Bewertungen
- 21 Clever Ways To Make Him Chase YouDokument1 Seite21 Clever Ways To Make Him Chase YouMagdalena SekulovaNoch keine Bewertungen
- Kruskal's Algorithm: Graph Tree Search AlgorithmsDokument16 SeitenKruskal's Algorithm: Graph Tree Search AlgorithmsMohanah JayakumaranNoch keine Bewertungen
- Public Relations vs. Propaganda: Alexandru BASTIANDokument6 SeitenPublic Relations vs. Propaganda: Alexandru BASTIANFatima AshrafNoch keine Bewertungen
- A Framework For Engaging Diverse Communities in Citizen Science in The USDokument4 SeitenA Framework For Engaging Diverse Communities in Citizen Science in The UStesemar010Noch keine Bewertungen
- Mock 1 Practice PaperDokument27 SeitenMock 1 Practice PaperSupriti SarkerNoch keine Bewertungen
- Communication Skills For Pharmacists UkratkoDokument2 SeitenCommunication Skills For Pharmacists UkratkoГоран МарковиќNoch keine Bewertungen
- Bekele (2005) Urbanization and Urban SprawlDokument65 SeitenBekele (2005) Urbanization and Urban Sprawlentbeard77100% (3)
- Lesson 2.5 Reading Strategies - Narrative TextsDokument34 SeitenLesson 2.5 Reading Strategies - Narrative Textsjannica yzabelNoch keine Bewertungen
- Facility Planning - Layout Process 4Dokument102 SeitenFacility Planning - Layout Process 4nouman khan100% (1)
- 1st Opp ExamPaper - CISM 122Dokument4 Seiten1st Opp ExamPaper - CISM 122Sbu JohannesNoch keine Bewertungen
- Correspondence Option: Society of Cosmetic Chemists South Africa Tel:011 792-4531 Email:bridget@coschem - Co.zaDokument1 SeiteCorrespondence Option: Society of Cosmetic Chemists South Africa Tel:011 792-4531 Email:bridget@coschem - Co.zanblaksNoch keine Bewertungen
- SUBIECTE - LICEU EnglezaDokument34 SeitenSUBIECTE - LICEU EnglezaElla Petrescu VasiiNoch keine Bewertungen
- The Following Text Is For Questions 1 To 4Dokument10 SeitenThe Following Text Is For Questions 1 To 4Audi Niswa YusfiyaNoch keine Bewertungen
- Low-Power and Area-Efficient Shift Register Using Pulsed Latches With CMOS TechnologyDokument6 SeitenLow-Power and Area-Efficient Shift Register Using Pulsed Latches With CMOS TechnologySesharatnam KoppulaNoch keine Bewertungen
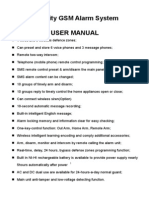
- GSM ALARMDokument17 SeitenGSM ALARMDragan StanicNoch keine Bewertungen
- Maximum Remaining - CodeChefDokument3 SeitenMaximum Remaining - CodeChefShubhi SinghNoch keine Bewertungen
- SQL Server Coding Standards: Hexaware TechnologiesDokument22 SeitenSQL Server Coding Standards: Hexaware TechnologieschandhsekeNoch keine Bewertungen
- Kaizen MR - Final PDFDokument65 SeitenKaizen MR - Final PDFbhatiaharryjassiNoch keine Bewertungen
- L15 Conflict Management SDokument18 SeitenL15 Conflict Management SjnfzNoch keine Bewertungen
- Software Requirements Specification TemplateDokument6 SeitenSoftware Requirements Specification TemplatekkrrrsssNoch keine Bewertungen
- Beekman - Tomorrow's Technology and You 9eDokument89 SeitenBeekman - Tomorrow's Technology and You 9eJimmy DrakeNoch keine Bewertungen