Das könnte Ihnen auch gefallen
- FORD Falcon XA Repair ManualDokument770 SeitenFORD Falcon XA Repair ManualMark Kenzie100% (10)
- QTM - Soap Battle CaseDokument7 SeitenQTM - Soap Battle CaseAshish Babaria100% (1)
- Into The Unknown 21 Doc PDFDokument9 SeitenInto The Unknown 21 Doc PDFFernando AlbuquerqueNoch keine Bewertungen
- Africa-Culture Christopher Ehret's Parts Excluded From WikiDokument16 SeitenAfrica-Culture Christopher Ehret's Parts Excluded From WikiJulio Cesar100% (1)
- 2014 An125hkl4Dokument69 Seiten2014 An125hkl4El Turco ChalabeNoch keine Bewertungen
- Syntorial NotesDokument13 SeitenSyntorial NotesdanNoch keine Bewertungen
- S.V. Kulkarni, S.A. Khaparde Transformer and Inductor Design Handbook 2004Dokument532 SeitenS.V. Kulkarni, S.A. Khaparde Transformer and Inductor Design Handbook 2004Gianpiero Boccato0% (1)
- Catalogue: Packer SystemDokument56 SeitenCatalogue: Packer SystemChinmoyee Sharma100% (1)
- Analysis Decline Curve IngleDokument13 SeitenAnalysis Decline Curve Ingleaminta26100% (1)
- Full Field SimulationDokument38 SeitenFull Field Simulationb3114880Noch keine Bewertungen
- Use of Commercial CFD Codes To Enhance Performance Prediction Capabilities For Planning BoatsDokument9 SeitenUse of Commercial CFD Codes To Enhance Performance Prediction Capabilities For Planning Boatsgnd100Noch keine Bewertungen
- Refrigeration Engineer Quick ReferenceDokument2 SeitenRefrigeration Engineer Quick ReferenceventilationNoch keine Bewertungen
- Decline Equations ChapterDokument16 SeitenDecline Equations ChapterAna WesselNoch keine Bewertungen
- The Development, Testing, and Application of A Numerical Simulator For Predicting Miscible Flood PerformanceDokument9 SeitenThe Development, Testing, and Application of A Numerical Simulator For Predicting Miscible Flood PerformancechazingNoch keine Bewertungen
- Lord 1991Dokument7 SeitenLord 1991yalocim666Noch keine Bewertungen
- Waterman, D., Broere, W., 2005, Application of The SSC Model - Part IIIDokument1 SeiteWaterman, D., Broere, W., 2005, Application of The SSC Model - Part IIIJakaNoch keine Bewertungen
- Zonal Two Equation K-W Turbulence Models For Aerodynamic FlowsDokument22 SeitenZonal Two Equation K-W Turbulence Models For Aerodynamic FlowsEnricNoch keine Bewertungen
- Bus Route ModelDokument15 SeitenBus Route ModelOGNoch keine Bewertungen
- Curve Correction in Atomic Absorption: Application NoteDokument6 SeitenCurve Correction in Atomic Absorption: Application NotemilossmileNoch keine Bewertungen
- IADC/SPE 81636 Improvements in Dynamic Modeling of Underbalanced DrillingDokument8 SeitenIADC/SPE 81636 Improvements in Dynamic Modeling of Underbalanced DrillingJohnSmithNoch keine Bewertungen
- Alaa-92-G439 A One-Equatlon Turbulence For Aerodynamic FlowsDokument23 SeitenAlaa-92-G439 A One-Equatlon Turbulence For Aerodynamic FlowsDr. G. C. Vishnu Kumar Assistant Professor III - AERONoch keine Bewertungen
- Waterman D Broere W 2004 Application of The SSC model-partIII PDFDokument1 SeiteWaterman D Broere W 2004 Application of The SSC model-partIII PDFBookAncestorNoch keine Bewertungen
- PMSM Open Corcuit FaultDokument8 SeitenPMSM Open Corcuit Faultzy lNoch keine Bewertungen
- Numerical Methods in Fluids - 1999 - Zienkiewicz - The Characteristic Based Split Procedure An Efficient and AccurateDokument35 SeitenNumerical Methods in Fluids - 1999 - Zienkiewicz - The Characteristic Based Split Procedure An Efficient and AccurateGabriela BianchinNoch keine Bewertungen
- SPE 94140 Quantification of Uncertainty in Relative Permeability For Coarse-Scale Reservoir SimulationDokument11 SeitenSPE 94140 Quantification of Uncertainty in Relative Permeability For Coarse-Scale Reservoir SimulationSikander MushtaqNoch keine Bewertungen
- Critical ReviewDokument6 SeitenCritical Reviewsajjad moradiNoch keine Bewertungen
- Xiao 2013Dokument14 SeitenXiao 2013Li DongyueNoch keine Bewertungen
- MaterialBalancepayne1996Dokument8 SeitenMaterialBalancepayne1996PedroNoch keine Bewertungen
- SPE 114591 Rate Transient Analysis in Naturally Fractured Shale Gas ReservoirsDokument17 SeitenSPE 114591 Rate Transient Analysis in Naturally Fractured Shale Gas ReservoirsIbrahim ElsawyNoch keine Bewertungen
- XIII Paper 09 PDFDokument12 SeitenXIII Paper 09 PDFArcangelo Di TanoNoch keine Bewertungen
- Analysis To Traffic: DispersionDokument13 SeitenAnalysis To Traffic: DispersionRamadan DurakuNoch keine Bewertungen
- SPE 79692 A New Formulation For The Implicit Compositional Simulation of Miscible Gas Injection ProcessesDokument8 SeitenSPE 79692 A New Formulation For The Implicit Compositional Simulation of Miscible Gas Injection ProcessesMohama KarimiNoch keine Bewertungen
- A Comprehensive Mechanistic Model For Upward Two-Phase Flow in WellboresDokument10 SeitenA Comprehensive Mechanistic Model For Upward Two-Phase Flow in WellboresGalaktecos99 Galaktecos99Noch keine Bewertungen
- Preconditioning Markov Chain Monte Carlo Simulations Using Coarse-Scale ModelsDokument29 SeitenPreconditioning Markov Chain Monte Carlo Simulations Using Coarse-Scale ModelsRajiv AgNoch keine Bewertungen
- FAST99 PaperDokument12 SeitenFAST99 PapertdfsksNoch keine Bewertungen
- Metastable Vacua From Torsion and Machine LearningDokument26 SeitenMetastable Vacua From Torsion and Machine LearningEnrique EscalanteNoch keine Bewertungen
- Compositional and Black Oil Reservoir SimulationDokument8 SeitenCompositional and Black Oil Reservoir SimulationCamiloAndresGuerreroNoch keine Bewertungen
- K EpsilonDokument39 SeitenK EpsilonRahul AroraNoch keine Bewertungen
- Effect of Dispersion and Deadend Pore Volume in Miscible FloodingDokument9 SeitenEffect of Dispersion and Deadend Pore Volume in Miscible FloodingLuis Alberto Angulo PerezNoch keine Bewertungen
- 008 - Tailings 2017 A Model of Solid Liquid Separation of Mining Slurries Experimental Validation and Scale UpDokument9 Seiten008 - Tailings 2017 A Model of Solid Liquid Separation of Mining Slurries Experimental Validation and Scale UpMinh HòaNoch keine Bewertungen
- Material-Balance Calculations in Tight-GasDokument8 SeitenMaterial-Balance Calculations in Tight-GasANoch keine Bewertungen
- Simulation of Diesel Spray in A ConstantDokument5 SeitenSimulation of Diesel Spray in A ConstantAkshay VaidhyNoch keine Bewertungen
- 1979 Whitson Note RelPerm Krgkro FittingDokument6 Seiten1979 Whitson Note RelPerm Krgkro FittingPorfirio AguileraNoch keine Bewertungen
- CILAMCE2019 AndresaAlexandreDokument17 SeitenCILAMCE2019 AndresaAlexandreBERNARDO HOROWITZNoch keine Bewertungen
- Optimal Loop Parallelization For Maximizing Iteration-Level ParallelismDokument10 SeitenOptimal Loop Parallelization For Maximizing Iteration-Level ParallelismIlias BenyekhlefNoch keine Bewertungen
- 1993 - Menter - Zonal Two Equation K-W Turbulence Models For Aerodynamic Flows PDFDokument22 Seiten1993 - Menter - Zonal Two Equation K-W Turbulence Models For Aerodynamic Flows PDFMayra ZezattiNoch keine Bewertungen
- 01-Introduction To Reservoir SimulationDokument18 Seiten01-Introduction To Reservoir SimulationWaleed Barakat MariaNoch keine Bewertungen
- Compare Turbulence Models For CFD ApplicationsDokument11 SeitenCompare Turbulence Models For CFD ApplicationsgrkguptaNoch keine Bewertungen
- Revision For ES441, Term 1, 2004.: April 7, 2005Dokument4 SeitenRevision For ES441, Term 1, 2004.: April 7, 2005getsweetNoch keine Bewertungen
- Objectives:: Example 1: Tight Gas Well, Piceance Basin, ColoradoDokument13 SeitenObjectives:: Example 1: Tight Gas Well, Piceance Basin, ColoradoJaime HernandezNoch keine Bewertungen
- A Multi-Scale Framework For Digital Core Analysis of Gas Shale at Millimeter ScalesDokument8 SeitenA Multi-Scale Framework For Digital Core Analysis of Gas Shale at Millimeter ScalesSui WeiboNoch keine Bewertungen
- High Pressure Gas Reservoir Waxing ProblemDokument41 SeitenHigh Pressure Gas Reservoir Waxing ProblemAoun FatehNoch keine Bewertungen
- Dq0-Modeling of Interior Permanent-Magnet Synchronous Machines For High-Fidelity Model Order ReductionDokument8 SeitenDq0-Modeling of Interior Permanent-Magnet Synchronous Machines For High-Fidelity Model Order ReductionYusufANoch keine Bewertungen
- Bose1997 Preparation of Nonclassical States in Cavities With A MovingDokument12 SeitenBose1997 Preparation of Nonclassical States in Cavities With A MovingVeronika TreumovaNoch keine Bewertungen
- Use and Misuse of Reservoir Simulation Models: The U. of Texas at AustinDokument8 SeitenUse and Misuse of Reservoir Simulation Models: The U. of Texas at AustinbibiNoch keine Bewertungen
- Spe 2367 Pa PDFDokument8 SeitenSpe 2367 Pa PDFbibiNoch keine Bewertungen
- 658 1405 1 SMDokument16 Seiten658 1405 1 SMIdrissa BaNoch keine Bewertungen
- Leclaire-2012-Numerical Evaluation of Two RecoDokument16 SeitenLeclaire-2012-Numerical Evaluation of Two Reco旭康 鲁Noch keine Bewertungen
- SPE-182704-MS - A Novel IPR Calculation Technique To Reduce Oscillations in Time-Lagged Network-Reservoir Coupled Modeling Using Analytical Scaling and Fast Marching Method PDFDokument12 SeitenSPE-182704-MS - A Novel IPR Calculation Technique To Reduce Oscillations in Time-Lagged Network-Reservoir Coupled Modeling Using Analytical Scaling and Fast Marching Method PDFDenis GontarevNoch keine Bewertungen
- Chapter 00 - OverviewDokument7 SeitenChapter 00 - OverviewLeonardo Octavio Olarte SánchezNoch keine Bewertungen
- Spe 2790 PaDokument6 SeitenSpe 2790 PaGabriela OjedaNoch keine Bewertungen
- Numerical Analysis of Tuned Liquid Dampers For Structural Vibration ControlDokument42 SeitenNumerical Analysis of Tuned Liquid Dampers For Structural Vibration Controlkamalendu09CE1032Noch keine Bewertungen
- Numerical Simulation On Pump As Turbine Mesh Reliability and Performance ConcernsDokument6 SeitenNumerical Simulation On Pump As Turbine Mesh Reliability and Performance ConcernsDaniel Santacruz LNoch keine Bewertungen
- الشرحياتDokument4 Seitenالشرحياتعلي سعيد سعودNoch keine Bewertungen
- Production Performance of Gas Condensate Reservoirs - Compositional Numerical ModelDokument13 SeitenProduction Performance of Gas Condensate Reservoirs - Compositional Numerical ModelJamalNoch keine Bewertungen
- WS7 Markhov Chain Monte Carlo OptimizationDokument9 SeitenWS7 Markhov Chain Monte Carlo Optimizationgenet worknehNoch keine Bewertungen
- MOdelling of Wake-Induced Transition With Dynamic PDFDokument163 SeitenMOdelling of Wake-Induced Transition With Dynamic PDFZang NguyenNoch keine Bewertungen
- Transactions of the American Society of Civil Engineers, Vol. LXX, Dec. 1910 Locomotive Performance On Grades Of Various Lengths, Paper No. 1172Von EverandTransactions of the American Society of Civil Engineers, Vol. LXX, Dec. 1910 Locomotive Performance On Grades Of Various Lengths, Paper No. 1172Noch keine Bewertungen
- Problem 4Dokument1 SeiteProblem 4Han QingNoch keine Bewertungen
- Potential FlowDokument12 SeitenPotential FlowHan QingNoch keine Bewertungen
- Problem 3 The University Runs Two Bus Lines On Campus: Red and Green. The Red LineDokument1 SeiteProblem 3 The University Runs Two Bus Lines On Campus: Red and Green. The Red LineHan QingNoch keine Bewertungen
- HW 6Dokument1 SeiteHW 6Han QingNoch keine Bewertungen
- Quiz 2 SolutionfDokument5 SeitenQuiz 2 SolutionfHan QingNoch keine Bewertungen
- Young LaplaceDokument2 SeitenYoung LaplaceHan QingNoch keine Bewertungen
- Spherical CapacitorDokument2 SeitenSpherical CapacitorHan QingNoch keine Bewertungen
- PDokument128 SeitenPHan QingNoch keine Bewertungen
- FrequencyDokument3 SeitenFrequencyHan QingNoch keine Bewertungen
- CombargsDokument4 SeitenCombargsHan QingNoch keine Bewertungen
- Logical ConstraintsDokument4 SeitenLogical ConstraintsHan QingNoch keine Bewertungen
- Complex Ques - 08Dokument1 SeiteComplex Ques - 08Han QingNoch keine Bewertungen
- GroupDokument1 SeiteGroupHan QingNoch keine Bewertungen
- Assignment 1Dokument3 SeitenAssignment 1Han QingNoch keine Bewertungen
- Number Theory ExerciseDokument1 SeiteNumber Theory ExerciseHan QingNoch keine Bewertungen
- W. (This Just: ProofDokument2 SeitenW. (This Just: ProofHan QingNoch keine Bewertungen
- BroniwDokument11 SeitenBroniwHan QingNoch keine Bewertungen
- Question 2 - Teoh Han KhengDokument1 SeiteQuestion 2 - Teoh Han Kheng2012PhCNoch keine Bewertungen
- Spherical CapacitorDokument2 SeitenSpherical CapacitorHan QingNoch keine Bewertungen
- 1 The Fourier TransformDokument5 Seiten1 The Fourier TransformHan QingNoch keine Bewertungen
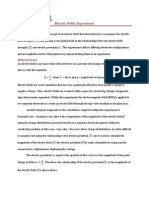
- Electric Fields ExperimentDokument5 SeitenElectric Fields ExperimentEmily Gatlin100% (3)
- Logarithm GraphDokument1 SeiteLogarithm GraphHan QingNoch keine Bewertungen
- Ques 09Dokument1 SeiteQues 09Han QingNoch keine Bewertungen
- Standard Deviation, and To Calculate The Propagation of ErrorsDokument5 SeitenStandard Deviation, and To Calculate The Propagation of ErrorsHan QingNoch keine Bewertungen
- Gamma FunctionDokument3 SeitenGamma FunctionHan QingNoch keine Bewertungen
- 1985 2000 Al Chem EssayDokument62 Seiten1985 2000 Al Chem EssayEunice_Chong_2134Noch keine Bewertungen
- Iloilo City Regulation Ordinance 2006-010Dokument4 SeitenIloilo City Regulation Ordinance 2006-010Iloilo City CouncilNoch keine Bewertungen
- Soal Bahasa Inggris X - XiDokument6 SeitenSoal Bahasa Inggris X - XiBydowie IqbalNoch keine Bewertungen
- English 8 - B TR Và Nâng CaoDokument150 SeitenEnglish 8 - B TR Và Nâng CaohhNoch keine Bewertungen
- Case-Study - Decision Making Under UncertaintyDokument21 SeitenCase-Study - Decision Making Under UncertaintyMari GhviniashviliNoch keine Bewertungen
- Fantasy AGE - Spell SheetDokument2 SeitenFantasy AGE - Spell SheetpacalypseNoch keine Bewertungen
- Microscope MaintenanceDokument2 SeitenMicroscope MaintenanceCharlyn KeithNoch keine Bewertungen
- Complicaciones Postoperatorias en Esofagectomía Por Cáncer. Evaluación de 215 Casos Según Definiciones Del Grupo de Consenso InternacionalDokument7 SeitenComplicaciones Postoperatorias en Esofagectomía Por Cáncer. Evaluación de 215 Casos Según Definiciones Del Grupo de Consenso InternacionalPaulo RoseroNoch keine Bewertungen
- Deld12070 CC18 GT 371 C CDokument1 SeiteDeld12070 CC18 GT 371 C CDEBASIS BARMANNoch keine Bewertungen
- TA308 616configurationDokument1 SeiteTA308 616configurationJesus AvilaNoch keine Bewertungen
- Mathematics For Engineers and Scientists 3 PDFDokument89 SeitenMathematics For Engineers and Scientists 3 PDFShailin SequeiraNoch keine Bewertungen
- Color Codes and Irregular MarkingDokument354 SeitenColor Codes and Irregular MarkingOscarGonzalezNoch keine Bewertungen
- University of Engineering and Technology TaxilaDokument5 SeitenUniversity of Engineering and Technology TaxilagndfgNoch keine Bewertungen
- Tempera 2018 AbstractsDokument45 SeitenTempera 2018 AbstractsGerard Emmanuel KamdemNoch keine Bewertungen
- Introduction To Reproduction PDFDokument8 SeitenIntroduction To Reproduction PDFLmssvNoch keine Bewertungen
- Chapter 3 FinalizedDokument11 SeitenChapter 3 Finalizedpeter vanderNoch keine Bewertungen
- The Ecological Effects of Eucalyptus PDFDokument97 SeitenThe Ecological Effects of Eucalyptus PDFgejuinaNoch keine Bewertungen
- Sermo 13 de Tempore (2 Feb in Praes)Dokument1 SeiteSermo 13 de Tempore (2 Feb in Praes)GeorgesEdouardNoch keine Bewertungen
- En LF Drivers 10nw76 8Dokument3 SeitenEn LF Drivers 10nw76 8ChrisNoch keine Bewertungen
- Signals and Systems: Dr. Shurjeel WyneDokument3 SeitenSignals and Systems: Dr. Shurjeel Wynemarryam nawazNoch keine Bewertungen
- EY Enhanced Oil RecoveryDokument24 SeitenEY Enhanced Oil RecoveryDario Pederiva100% (1)
- Master Key Utbk Saintek 2022 (Paket 3) Bahasa InggrisDokument5 SeitenMaster Key Utbk Saintek 2022 (Paket 3) Bahasa InggrisRina SetiawatiNoch keine Bewertungen
- DHT, VGOHT - Catloading Diagram - Oct2005Dokument3 SeitenDHT, VGOHT - Catloading Diagram - Oct2005Bikas SahaNoch keine Bewertungen