Das könnte Ihnen auch gefallen
- Trig Cheat SheetDokument2 SeitenTrig Cheat SheetDino97% (77)
- Calc 3 Cheat SheetDokument2 SeitenCalc 3 Cheat SheetGloria CarrilloNoch keine Bewertungen
- PHYS363 Formula SheetDokument2 SeitenPHYS363 Formula SheetBen MacLellan100% (1)
- Fluid Mechanics Equation Sheet FullDokument5 SeitenFluid Mechanics Equation Sheet FullZara ThomasNoch keine Bewertungen
- Series Cheat SheetDokument1 SeiteSeries Cheat Sheetsharmanator99Noch keine Bewertungen
- Calculus Cheat Sheet IntegralsDokument5 SeitenCalculus Cheat Sheet Integralshyd arnes100% (5)
- Assignment 4 SolutionsDokument9 SeitenAssignment 4 SolutionsNengke Lin100% (2)
- Formulas For Calculus-Based Physics 1Dokument1 SeiteFormulas For Calculus-Based Physics 1Steven J. Biars100% (2)
- Dynamics FULL Equation SheetDokument2 SeitenDynamics FULL Equation SheetZachNoch keine Bewertungen
- Multivariable Calculus Review SheetDokument2 SeitenMultivariable Calculus Review SheetSteven Walker100% (1)
- Solution Manual for an Introduction to Equilibrium ThermodynamicsVon EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNoch keine Bewertungen
- Physics Formula SheetDokument12 SeitenPhysics Formula SheetRohit Ghere100% (4)
- Zest O CorporationDokument21 SeitenZest O CorporationJhamane Chan53% (15)
- Freshman Physics Formula SheetDokument6 SeitenFreshman Physics Formula SheetMickey Boy83% (6)
- Vectors Cheat SheetDokument2 SeitenVectors Cheat SheetganeshykrNoch keine Bewertungen
- Vector Cheat Sheet in 2 SpaceDokument3 SeitenVector Cheat Sheet in 2 SpaceM J RhoadesNoch keine Bewertungen
- Factors Affecting Physical FitnessDokument7 SeitenFactors Affecting Physical FitnessMary Joy Escanillas Gallardo100% (2)
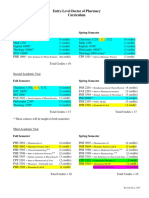
- Pharmd CurriculumDokument18 SeitenPharmd Curriculum5377773Noch keine Bewertungen
- Mechanics Formula SheetDokument1 SeiteMechanics Formula Sheetej_00017Noch keine Bewertungen
- Limit FormulasDokument6 SeitenLimit FormulasRahul DubeyNoch keine Bewertungen
- Calculus Cheat Sheet-2Dokument2 SeitenCalculus Cheat Sheet-2davidginola123Noch keine Bewertungen
- Engineering Formula SheetDokument10 SeitenEngineering Formula SheetAdarsh Kumar AngNoch keine Bewertungen
- Differential Equations Problems and SolutionsDokument19 SeitenDifferential Equations Problems and SolutionsBrian McCannNoch keine Bewertungen
- Basic Concepts of Differential and Integral CalculusDokument6 SeitenBasic Concepts of Differential and Integral CalculusManoj KhandelwalNoch keine Bewertungen
- Calculus Cheat SheetsDokument5 SeitenCalculus Cheat Sheetsanon-524795100% (72)
- Graphs of Elementary Functions: Linear Functions Quadratic FunctionsDokument3 SeitenGraphs of Elementary Functions: Linear Functions Quadratic FunctionsDavid LucasNoch keine Bewertungen
- Integration Partial Fractions PDFDokument10 SeitenIntegration Partial Fractions PDFrendie100% (1)
- Engineering Mechanics NotesDokument25 SeitenEngineering Mechanics NotesSameer Sawarkar100% (1)
- Calculus Cheat Sheet Part 3Dokument4 SeitenCalculus Cheat Sheet Part 3Dave Cloud100% (12)
- Problems Differential EquationsDokument121 SeitenProblems Differential EquationsRazes50% (4)
- Intergal CalculusDokument20 SeitenIntergal CalculusElizabeth ErwanNoch keine Bewertungen
- Elec 3202 Chap 8Dokument50 SeitenElec 3202 Chap 8budi_ummNoch keine Bewertungen
- AP Calculus BC Study GuideDokument4 SeitenAP Calculus BC Study Guidearachide8100% (1)
- Partial FractionsDokument12 SeitenPartial FractionsCY100% (1)
- 1d3formula PDFDokument1 Seite1d3formula PDFasdaasdNoch keine Bewertungen
- Formula Sheet PH121Dokument1 SeiteFormula Sheet PH121menteNoch keine Bewertungen
- Physics FormulasDokument2 SeitenPhysics FormulasKristine BalansagNoch keine Bewertungen
- Formula Sheet MechanicsDokument2 SeitenFormula Sheet Mechanicscarolinebrongelcopti24Noch keine Bewertungen
- Kinematics Modern PhysicsDokument1 SeiteKinematics Modern PhysicsBoldie LutwigNoch keine Bewertungen
- Equation Sheet 231 PhysicsDokument2 SeitenEquation Sheet 231 PhysicsAshlie PolancoNoch keine Bewertungen
- Physics I: Tudor Ciobanu, s184476, GE2018 November 2018Dokument8 SeitenPhysics I: Tudor Ciobanu, s184476, GE2018 November 2018CiobanuTudorNoch keine Bewertungen
- Fundamental of Physics Cheat SheetDokument4 SeitenFundamental of Physics Cheat SheetMohamed MohamedNoch keine Bewertungen
- Chapter 2: One-Dimensional Kinematics: Av AvDokument3 SeitenChapter 2: One-Dimensional Kinematics: Av AvVivian DoanNoch keine Bewertungen
- LE2 List of EquationsDokument2 SeitenLE2 List of EquationsjustdellixNoch keine Bewertungen
- Formulario I ParcialDokument1 SeiteFormulario I Parcialseca cacaNoch keine Bewertungen
- Chapter 2: Kinematics of Particles: Constrained MotionDokument3 SeitenChapter 2: Kinematics of Particles: Constrained MotionRicardo TapiaNoch keine Bewertungen
- Equations 101Dokument2 SeitenEquations 101fandialrehamNoch keine Bewertungen
- Formulas Test Phy2053 StudentDokument4 SeitenFormulas Test Phy2053 Studentwidmael alcenatNoch keine Bewertungen
- Fysikk Tabell UK 2015-2016Dokument2 SeitenFysikk Tabell UK 2015-2016Maga KhadisovNoch keine Bewertungen
- Physics FormulasDokument1 SeitePhysics FormulasspinfxNoch keine Bewertungen
- Formula Rio 1Dokument1 SeiteFormula Rio 1Brandon ChavesNoch keine Bewertungen
- Ex 04 Ans KeyDokument2 SeitenEx 04 Ans KeyMarc Ajay RajeshNoch keine Bewertungen
- Phy120 Serway EquationsDokument1 SeitePhy120 Serway EquationsMohamed ElashriNoch keine Bewertungen
- Physics FormulasDokument10 SeitenPhysics FormulasFaith Laurence SarmientoNoch keine Bewertungen
- Phys 111 Final Exam Formulas - Fall 2011: DT DWDokument1 SeitePhys 111 Final Exam Formulas - Fall 2011: DT DWVenkataramanan SureshNoch keine Bewertungen
- Formula SheetDokument1 SeiteFormula SheetMama PigNoch keine Bewertungen
- Physics Data Sheet: Useful ConstantsDokument2 SeitenPhysics Data Sheet: Useful ConstantsReghan VersteegeNoch keine Bewertungen
- Physics 40S Formula SheetDokument1 SeitePhysics 40S Formula SheetWaleedSubhanNoch keine Bewertungen
- Physics Formulas: MotionDokument6 SeitenPhysics Formulas: MotionfarujoyNoch keine Bewertungen
- FormulaDokument2 SeitenFormulaAshley DeborahNoch keine Bewertungen
- Cvit FT Derivation PDFDokument2 SeitenCvit FT Derivation PDFkrishnaNoch keine Bewertungen
- Cvit FT Derivation PDFDokument2 SeitenCvit FT Derivation PDFBlazeBlack54Noch keine Bewertungen
- 203-SN1-RE Feuille Formules H2024Dokument2 Seiten203-SN1-RE Feuille Formules H2024petterpaul800Noch keine Bewertungen
- Tables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesVon EverandTables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesNoch keine Bewertungen
- Integral TableDokument4 SeitenIntegral TableWasyhun AsefaNoch keine Bewertungen
- 10th Electromagnetic InductionDokument4 Seiten10th Electromagnetic InductionDax1647Noch keine Bewertungen
- 0 DF DX 0 0 0 0 0 0 0 0 0 0 0 0 F (X) G (X) F (X) G (X) F (X) G (X) G (X) 1 G (X) G (X) G (X) 0 0Dokument4 Seiten0 DF DX 0 0 0 0 0 0 0 0 0 0 0 0 F (X) G (X) F (X) G (X) F (X) G (X) G (X) 1 G (X) G (X) G (X) 0 0Maher MestoNoch keine Bewertungen
- RK Electric PotentialDokument3 SeitenRK Electric PotentialDax1647Noch keine Bewertungen
- 12th STD FormulasDokument23 Seiten12th STD FormulasDax1647Noch keine Bewertungen
- 12th STD FormulasDokument23 Seiten12th STD FormulasDax1647Noch keine Bewertungen
- Wave OpticsDokument25 SeitenWave OpticsDax1647Noch keine Bewertungen
- Precession of Spinning TopDokument1 SeitePrecession of Spinning TopDax1647Noch keine Bewertungen
- Misconceptions About TidesDokument24 SeitenMisconceptions About TidesDax1647Noch keine Bewertungen
- Frame of RefernceDokument1 SeiteFrame of RefernceDax1647Noch keine Bewertungen
- 1.1 The Prescription of Blood ComponentsDokument9 Seiten1.1 The Prescription of Blood ComponentsagurtovicNoch keine Bewertungen
- Manufacuring EngineeringDokument3 SeitenManufacuring Engineeringapi-79207659Noch keine Bewertungen
- Math 202 Syllabus-Spring18 PDFDokument2 SeitenMath 202 Syllabus-Spring18 PDFvonacoc49Noch keine Bewertungen
- ELIDA Products CatalogueDokument37 SeitenELIDA Products CatalogueAbhishek AgarwalNoch keine Bewertungen
- DNA Mutation and Its Effect To An Individual (w5)Dokument6 SeitenDNA Mutation and Its Effect To An Individual (w5)Cold CoockiesNoch keine Bewertungen
- Full Download Short Term Financial Management 3rd Edition Maness Test BankDokument35 SeitenFull Download Short Term Financial Management 3rd Edition Maness Test Bankcimanfavoriw100% (31)
- Chapter 10 - The Mature ErythrocyteDokument55 SeitenChapter 10 - The Mature ErythrocyteSultan AlexandruNoch keine Bewertungen
- Microbiology Part 3Dokument74 SeitenMicrobiology Part 3Authentic IdiotNoch keine Bewertungen
- Easergy PS100 48VDC Power SupplyDokument2 SeitenEasergy PS100 48VDC Power SupplyRichard SyNoch keine Bewertungen
- Maths All FormulasDokument5 SeitenMaths All FormulasVishnuNoch keine Bewertungen
- RUKUS April 2011Dokument40 SeitenRUKUS April 2011RUKUS Magazine100% (2)
- Monkeys PawDokument4 SeitenMonkeys PawKaitlin HartmanNoch keine Bewertungen
- Five Star Hotel and ResortDokument9 SeitenFive Star Hotel and ResortAISHNoch keine Bewertungen
- Recycling Mind MapDokument2 SeitenRecycling Mind Mapmsole124100% (1)
- Cac de Luyen ThiDokument18 SeitenCac de Luyen ThiVinh Dao CongNoch keine Bewertungen
- Dizziness - Vertigo and HomoeopathyDokument38 SeitenDizziness - Vertigo and HomoeopathyDr. Rajneesh Kumar Sharma MD HomNoch keine Bewertungen
- Aluminium Alloy - Wikipedia, The Free EncyclopediaDokument12 SeitenAluminium Alloy - Wikipedia, The Free EncyclopediaAshishJoshi100% (1)
- Conformational Analysis: Carey & Sundberg: Part A Chapter 3Dokument53 SeitenConformational Analysis: Carey & Sundberg: Part A Chapter 3Dr-Dinesh Kumar100% (1)
- Brief Summary of Catalytic ConverterDokument23 SeitenBrief Summary of Catalytic ConverterjoelNoch keine Bewertungen
- The Variable Resistor Has Been AdjustedDokument3 SeitenThe Variable Resistor Has Been AdjustedPank O RamaNoch keine Bewertungen
- 3.1 - Sequences and SeriesxbxhhdDokument92 Seiten3.1 - Sequences and SeriesxbxhhdHelloNoch keine Bewertungen
- L2 Biostatistics ProbabilityDokument84 SeitenL2 Biostatistics ProbabilityAaron CiudadNoch keine Bewertungen
- Lc420euf Sda1 LGDokument41 SeitenLc420euf Sda1 LGjavierNoch keine Bewertungen
- Donna Hay Magazine 2014-10-11 PDFDokument172 SeitenDonna Hay Magazine 2014-10-11 PDFlekovic_tanjaNoch keine Bewertungen
- Ii 2015 1Dokument266 SeitenIi 2015 1tuni santeNoch keine Bewertungen
- Communication Guide: For Vita 62 Compliant VPX Power SuppliesDokument8 SeitenCommunication Guide: For Vita 62 Compliant VPX Power Suppliesk.saikumarNoch keine Bewertungen