Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Behavior of Concrete Under Biaxial StressesDokument11 SeitenBehavior of Concrete Under Biaxial StressesJakob Fisker50% (2)
- JPL D-5882 Trubert On MACDokument70 SeitenJPL D-5882 Trubert On MACphysicsnewblol100% (1)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Lect4 PDFDokument33 SeitenLect4 PDFphysicsnewblolNoch keine Bewertungen
- Lect2 PDFDokument43 SeitenLect2 PDFphysicsnewblolNoch keine Bewertungen
- Lect15 PDFDokument37 SeitenLect15 PDFphysicsnewblolNoch keine Bewertungen
- Lect3 PDFDokument47 SeitenLect3 PDFphysicsnewblolNoch keine Bewertungen
- Lessons From Smith Chart: Ward Harriman AE6TY Pacificon '13Dokument48 SeitenLessons From Smith Chart: Ward Harriman AE6TY Pacificon '13physicsnewblolNoch keine Bewertungen
- ACRYLIC SHEET EDGE AND SURFACE FINISHING - Plastic Distributor & Fabricator PDFDokument4 SeitenACRYLIC SHEET EDGE AND SURFACE FINISHING - Plastic Distributor & Fabricator PDFphysicsnewblolNoch keine Bewertungen
- Module 7 With SolutionsDokument22 SeitenModule 7 With SolutionsphysicsnewblolNoch keine Bewertungen
- Vishay Opto Brochure WebDokument20 SeitenVishay Opto Brochure WebphysicsnewblolNoch keine Bewertungen
- Epipolar GeometryDokument14 SeitenEpipolar GeometryphysicsnewblolNoch keine Bewertungen
- Catalogo Aurora - InddDokument20 SeitenCatalogo Aurora - InddphysicsnewblolNoch keine Bewertungen
- WinDokument36 SeitenWinphysicsnewblolNoch keine Bewertungen
- Pag8 9Dokument2 SeitenPag8 9physicsnewblolNoch keine Bewertungen
- Vector Fields and Solutions To Ordinary Differential Equations UsingDokument10 SeitenVector Fields and Solutions To Ordinary Differential Equations UsingphysicsnewblolNoch keine Bewertungen
- Additional Theory For Module 4: Dynamic Analysis: Eigensolution ExampleDokument7 SeitenAdditional Theory For Module 4: Dynamic Analysis: Eigensolution ExamplephysicsnewblolNoch keine Bewertungen
- W&W Inno Carbon User ManualDokument12 SeitenW&W Inno Carbon User ManualphysicsnewblolNoch keine Bewertungen
- Whitepaper Ncode MethodsforAcceleratingDynamicDurabilityTests V2-Halfpenny PDFDokument19 SeitenWhitepaper Ncode MethodsforAcceleratingDynamicDurabilityTests V2-Halfpenny PDFphysicsnewblolNoch keine Bewertungen
- Acm Vol2no1 p008 PDFDokument12 SeitenAcm Vol2no1 p008 PDFphysicsnewblolNoch keine Bewertungen
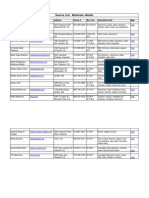
- Source List: Materials-Metals: Company Online Address Address Phone # Bus. Hrs Description-Info MapDokument2 SeitenSource List: Materials-Metals: Company Online Address Address Phone # Bus. Hrs Description-Info MapphysicsnewblolNoch keine Bewertungen
- S 164 ContentDokument12 SeitenS 164 ContentOrvin RommelNoch keine Bewertungen
- A Membrane Equivalent Method To Reproduce The Macroscopic Mechanical Responses of Steel Wire-Ring Nets Under Rockfall ImpactDokument16 SeitenA Membrane Equivalent Method To Reproduce The Macroscopic Mechanical Responses of Steel Wire-Ring Nets Under Rockfall ImpactaxelNoch keine Bewertungen
- CH-1 Introduction To Design of Machine Elements: Iot, Coe Department of Mechanical EngineeringDokument16 SeitenCH-1 Introduction To Design of Machine Elements: Iot, Coe Department of Mechanical EngineeringBK MKNoch keine Bewertungen
- Influence of Aging Parameters On The Mechanical Properties of 6063 Aluminium AlloyDokument7 SeitenInfluence of Aging Parameters On The Mechanical Properties of 6063 Aluminium AlloySunil KumbarNoch keine Bewertungen
- Q235 Steel, Q235A Q235B Q235C Q235D Specification, Chemical Composition, Properties & EquivalentDokument4 SeitenQ235 Steel, Q235A Q235B Q235C Q235D Specification, Chemical Composition, Properties & EquivalentWaqas WaqasNoch keine Bewertungen
- BURIED PIPING ANALYSIS - Al Kaye ppdfb07 PDFDokument58 SeitenBURIED PIPING ANALYSIS - Al Kaye ppdfb07 PDFi_tiberius_m8153100% (1)
- Diederichs Kaiser 1999aDokument21 SeitenDiederichs Kaiser 1999aSkyelementsNoch keine Bewertungen
- Steel Properties (Notes)Dokument27 SeitenSteel Properties (Notes)ellesor macalamNoch keine Bewertungen
- T01 04 Gil-Martin - Hernandez-Montes - GNP2020Dokument8 SeitenT01 04 Gil-Martin - Hernandez-Montes - GNP2020Kenan KajosevicNoch keine Bewertungen
- ENGR 313 - Chapter 4 - DislocationsDokument48 SeitenENGR 313 - Chapter 4 - DislocationsMelissa LaraNoch keine Bewertungen
- Practise Problems Set04Dokument5 SeitenPractise Problems Set04rohit kumarNoch keine Bewertungen
- Block Shear Failure Planes of Bolted ConnectionsDokument6 SeitenBlock Shear Failure Planes of Bolted ConnectionsEceNoch keine Bewertungen
- Sa1 06 Strainenergy 141008054710 Conversion Gate01 PDFDokument35 SeitenSa1 06 Strainenergy 141008054710 Conversion Gate01 PDFkandarpNoch keine Bewertungen
- Gera Zeris KotsovosDokument15 SeitenGera Zeris KotsovosJoseph HernándezNoch keine Bewertungen
- B Tech 4th SemDokument21 SeitenB Tech 4th SemKamurti Ajay KumarNoch keine Bewertungen
- Lookshit - Terms (76-150)Dokument75 SeitenLookshit - Terms (76-150)Christopher Lennon Dela CruzNoch keine Bewertungen
- Chapter4-1 1041020 PDFDokument54 SeitenChapter4-1 1041020 PDFVIVEK KUMAR YADAVNoch keine Bewertungen
- Dyna MGD 2016-08-21Dokument157 SeitenDyna MGD 2016-08-21Brian ForsmanNoch keine Bewertungen
- Mechanics of Materials-1Dokument166 SeitenMechanics of Materials-1Eemesh NarayanaNoch keine Bewertungen
- Suruburi Si Piulite en 20898-2Dokument1 SeiteSuruburi Si Piulite en 20898-2SILVIUNoch keine Bewertungen
- Design of A Flexible Automated Bottle Filling Machine: February 2017Dokument16 SeitenDesign of A Flexible Automated Bottle Filling Machine: February 2017M E B QasqasNoch keine Bewertungen
- LS-DYNA Wood Material Model 143 PDFDokument166 SeitenLS-DYNA Wood Material Model 143 PDFAnonymous Vi1lrHNoch keine Bewertungen
- Casing and Cement CourseDokument382 SeitenCasing and Cement CourseMortaja Ben KhalifaNoch keine Bewertungen
- Strength of High-Rise Shear Walls - Rectangular Cross SectionDokument28 SeitenStrength of High-Rise Shear Walls - Rectangular Cross Sectionamirreza3853Noch keine Bewertungen
- POLB-Wharf Design (Version 2.0)Dokument103 SeitenPOLB-Wharf Design (Version 2.0)mediannaNoch keine Bewertungen
- PropertiesDokument11 SeitenPropertiesImranKabirNoch keine Bewertungen
- Solved ISRO Scientist or Engineer Mechanical May 2017 Paper With SolutionsDokument26 SeitenSolved ISRO Scientist or Engineer Mechanical May 2017 Paper With SolutionsFaizan MansooriNoch keine Bewertungen
- 1 s2.0 S2214509522002479 Main PDFDokument23 Seiten1 s2.0 S2214509522002479 Main PDFHarpreet SinghNoch keine Bewertungen
- المحاظرة الثانية لدنتل متيريلDokument28 Seitenالمحاظرة الثانية لدنتل متيريلsaifNoch keine Bewertungen
- Review of Al Alloys in Aerospace IndustryDokument11 SeitenReview of Al Alloys in Aerospace IndustryCARLOS EDUARDO SANCHEZ RAMIREZNoch keine Bewertungen