Das könnte Ihnen auch gefallen
- Dynamic of Billboard Thin PlateDokument6 SeitenDynamic of Billboard Thin PlateJoseph Cloyd LamberteNoch keine Bewertungen
- Dynamic Analysis of Buildings Using The Finite Element Method SacatomaDokument15 SeitenDynamic Analysis of Buildings Using The Finite Element Method SacatomaEndless LoveNoch keine Bewertungen
- Dissertation2008 MarininiDokument151 SeitenDissertation2008 MarininiUte EnteNoch keine Bewertungen
- Stiffness MethodexDokument5 SeitenStiffness MethodexabbasNoch keine Bewertungen
- Article BlastDesign EquivalentStaticMethods SchmidtDokument11 SeitenArticle BlastDesign EquivalentStaticMethods SchmidtAnirudh S. Goel0% (1)
- 6 - Equation of Motion of MDOF Elastic SystemsDokument5 Seiten6 - Equation of Motion of MDOF Elastic Systemsengsam777Noch keine Bewertungen
- Modelling and Analysis of Seismic Base-Isolated Masonry Heritage Structures (Petrovcic, Et Al. 2015)Dokument10 SeitenModelling and Analysis of Seismic Base-Isolated Masonry Heritage Structures (Petrovcic, Et Al. 2015)Jose ManuelNoch keine Bewertungen
- Base Isolation For Multi Storey BuildingsDokument311 SeitenBase Isolation For Multi Storey BuildingsRal GL100% (1)
- Final Thesis PrintDokument71 SeitenFinal Thesis PrintRajaram ChennaNoch keine Bewertungen
- Ansys 2d FrameDokument16 SeitenAnsys 2d FramebensonNoch keine Bewertungen
- A Seismic Design of Concrete BridgesDokument25 SeitenA Seismic Design of Concrete BridgesBesima BajrićNoch keine Bewertungen
- Literature Review 2Dokument4 SeitenLiterature Review 2K.ANISHNoch keine Bewertungen
- Matlab-Simulink Upatstvo Za Vezbi SDDokument175 SeitenMatlab-Simulink Upatstvo Za Vezbi SDbutelcanecNoch keine Bewertungen
- Seismic Design To EC8 - L2Dokument31 SeitenSeismic Design To EC8 - L2Chamil Mahagamage100% (1)
- CE-5113 Lecture Notes 1Dokument19 SeitenCE-5113 Lecture Notes 1Qaiser IqbalNoch keine Bewertungen
- Structural Dynamics ReferencesDokument6 SeitenStructural Dynamics ReferencessmwassyNoch keine Bewertungen
- Turkiye MW 7.8 Earthquake Preliminary ReportDokument29 SeitenTurkiye MW 7.8 Earthquake Preliminary ReportGeorge PapazafeiropoulosNoch keine Bewertungen
- Formule Ploce I LjuskeDokument18 SeitenFormule Ploce I LjuskeAmar MušovićNoch keine Bewertungen
- This Lecture Note Is Mainly Quoted From The Text Book "Dynamics of Structures" by Anil K. Chopra, 3rd Edition, 2007Dokument95 SeitenThis Lecture Note Is Mainly Quoted From The Text Book "Dynamics of Structures" by Anil K. Chopra, 3rd Edition, 2007Ahmet TükenNoch keine Bewertungen
- Tsunamis and Hurricanes A Mathematical Approach PDFDokument201 SeitenTsunamis and Hurricanes A Mathematical Approach PDFMiguel NevesNoch keine Bewertungen
- Seismic Design of Structures-Post Graduate Program StudiesDokument25 SeitenSeismic Design of Structures-Post Graduate Program StudiesThiha KyawNoch keine Bewertungen
- Seismic & Wind Analysis of BridgesDokument21 SeitenSeismic & Wind Analysis of BridgesAbera MamoNoch keine Bewertungen
- Truss-FEM AnalysisDokument3 SeitenTruss-FEM AnalysisJohn TanNoch keine Bewertungen
- ArcelorMittal Cofrastra 70 Brochure enDokument12 SeitenArcelorMittal Cofrastra 70 Brochure enNedesca BogdanNoch keine Bewertungen
- Repair and Rehabilitation After EarthquakeDokument10 SeitenRepair and Rehabilitation After EarthquakeMohan NaikNoch keine Bewertungen
- 03 BradicDokument16 Seiten03 BradicAvdija HamzićNoch keine Bewertungen
- Protupotresna Izolacija Zgrada S Pomoću Elastomernih LežajevaDokument11 SeitenProtupotresna Izolacija Zgrada S Pomoću Elastomernih LežajevavedooooNoch keine Bewertungen
- Dissertation2007 GalliDokument188 SeitenDissertation2007 GalliJesús Enrique Martínez GonzálezNoch keine Bewertungen
- Pojednostavnjene Nelinearne Metode Prora Þuna Betonskih MostovaDokument9 SeitenPojednostavnjene Nelinearne Metode Prora Þuna Betonskih Mostovagknjd681Noch keine Bewertungen
- Accuracy of Nonlinear Static ProceduresDokument20 SeitenAccuracy of Nonlinear Static ProceduresShyamNoch keine Bewertungen
- Predmer I Predracun AntoninaDokument28 SeitenPredmer I Predracun AntoninaIgor Đorđević RigeNoch keine Bewertungen
- Direct Nonlinear Analysis Using Alpha MethodDokument15 SeitenDirect Nonlinear Analysis Using Alpha MethodNathanNoch keine Bewertungen
- Miha Tomaževič - Damage Limitation As A Basis For Assessment of Parameters For Seismic Resistant Design of Masonry BuildingsDokument13 SeitenMiha Tomaževič - Damage Limitation As A Basis For Assessment of Parameters For Seismic Resistant Design of Masonry BuildingsScribd2015Noch keine Bewertungen
- Effects of Kahramanmaras Earthquakes in South of Turkey On Livestock ActivitiesDokument10 SeitenEffects of Kahramanmaras Earthquakes in South of Turkey On Livestock ActivitiesIJAR JOURNALNoch keine Bewertungen
- Kružne Ploče Opterećene Na Savijanje-Rotacina SimetrijaDokument5 SeitenKružne Ploče Opterećene Na Savijanje-Rotacina SimetrijaLazić MilošNoch keine Bewertungen
- RC Frame Building With Masonry Infill Walls Designed For Gravity LoadsDokument16 SeitenRC Frame Building With Masonry Infill Walls Designed For Gravity LoadsFeras TemimiNoch keine Bewertungen
- (1972) Plastic Analysis of Castellated Beams-II. Analysis and TestsDokument30 Seiten(1972) Plastic Analysis of Castellated Beams-II. Analysis and TestsmikarceNoch keine Bewertungen
- Engineering Structures: Phaiboon PanyakapoDokument14 SeitenEngineering Structures: Phaiboon PanyakapoАвирмэдийн ГэрэлболдNoch keine Bewertungen
- Generalized SDOF SytemsDokument66 SeitenGeneralized SDOF SytemsAhmet TükenNoch keine Bewertungen
- Advanced Structural Analysis PDFDokument13 SeitenAdvanced Structural Analysis PDFkyleNoch keine Bewertungen
- Seismic Retrofitting of RC Frames With RC Infilling (SERFIN Project)Dokument106 SeitenSeismic Retrofitting of RC Frames With RC Infilling (SERFIN Project)afcisNoch keine Bewertungen
- Fem Finite Element AnalysisDokument11 SeitenFem Finite Element AnalysismiteshNoch keine Bewertungen
- Impact of Traffic Vibration On HeritageDokument10 SeitenImpact of Traffic Vibration On HeritageMohamad HabibiNoch keine Bewertungen
- TD SeminarskiDokument28 SeitenTD SeminarskiDurakNoch keine Bewertungen
- Tower - 3d Model Builder 6.0 - D - Radimpex Projekti - Boki France - ST EcDokument61 SeitenTower - 3d Model Builder 6.0 - D - Radimpex Projekti - Boki France - ST EcStojkovic CaleNoch keine Bewertungen
- Building Design SeismicDokument69 SeitenBuilding Design SeismicChristopher SingletonNoch keine Bewertungen
- Instalacija Tower Build 1350 I ArmCAD-a Build 1763 Na Win 7 x32Dokument1 SeiteInstalacija Tower Build 1350 I ArmCAD-a Build 1763 Na Win 7 x32emir mesnovicNoch keine Bewertungen
- A Review On Strut and Tie MethodsDokument7 SeitenA Review On Strut and Tie MethodsTùng HìNoch keine Bewertungen
- Dampers For Earthquake Vibration Control: Dr. Imad H. Mualla DAMPTECH Co., Ltd. DenmarkDokument16 SeitenDampers For Earthquake Vibration Control: Dr. Imad H. Mualla DAMPTECH Co., Ltd. Denmarkmuhammed mundhir100% (1)
- Primeri Ec3Dokument0 SeitenPrimeri Ec3jelenavukojeNoch keine Bewertungen
- 3d Pushover AnalysisDokument10 Seiten3d Pushover AnalysisBeenah Sheila KhushiramNoch keine Bewertungen
- Comparative Study of Seismic Analysis of Dampers in Asymmetrical R.C. Frame BuildingDokument9 SeitenComparative Study of Seismic Analysis of Dampers in Asymmetrical R.C. Frame BuildingIJRASETPublicationsNoch keine Bewertungen
- Dynamic Analysis Using FEMDokument47 SeitenDynamic Analysis Using FEMB S Praveen BspNoch keine Bewertungen
- Seismic Reliability Analysis of Structures: Paolo E. Pinto, Renato Giannini, Paolo Franchin Press Release, May 2004Dokument378 SeitenSeismic Reliability Analysis of Structures: Paolo E. Pinto, Renato Giannini, Paolo Franchin Press Release, May 2004RenatoNoch keine Bewertungen
- Performance of Masonry-InfilledDokument268 SeitenPerformance of Masonry-Infilledranjith6688Noch keine Bewertungen
- Lecture 11 - Finite Element MethodDokument9 SeitenLecture 11 - Finite Element MethodSiu EricNoch keine Bewertungen
- Pushover Procedure For Seismic Analysis of BuildingsDokument8 SeitenPushover Procedure For Seismic Analysis of BuildingsOdair Tonatiu Martínez ReyesNoch keine Bewertungen
- Strut-And-Tie Model Design Provisions: Robin G. Tuchscherer, David B. Birrcher, and Oguzhan BayrakDokument16 SeitenStrut-And-Tie Model Design Provisions: Robin G. Tuchscherer, David B. Birrcher, and Oguzhan BayrakDavid Apaza QuispeNoch keine Bewertungen
- Inverted-T Beams: Experiments and Strut-and-Tie Modeling: Aci Structural Journal Technical PaperDokument10 SeitenInverted-T Beams: Experiments and Strut-and-Tie Modeling: Aci Structural Journal Technical Paperchaval01Noch keine Bewertungen
- Nodal Regions) - A Selection of Strut-And-Tie Models For A Few Typical 2-D D-Regions Is IllustratedDokument9 SeitenNodal Regions) - A Selection of Strut-And-Tie Models For A Few Typical 2-D D-Regions Is IllustratedPrasanth NairNoch keine Bewertungen
- SECTION 10 - Foundation Works 2019Dokument78 SeitenSECTION 10 - Foundation Works 2019Chee Fong Make100% (1)
- Question 13 - Engineer Contribute HSE & Keep Abreast With DevelopmentDokument3 SeitenQuestion 13 - Engineer Contribute HSE & Keep Abreast With DevelopmentChee Fong MakeNoch keine Bewertungen
- Sumitech Catalog 2019Dokument48 SeitenSumitech Catalog 2019Chee Fong MakeNoch keine Bewertungen
- CN FenceDokument17 SeitenCN FenceChee Fong MakeNoch keine Bewertungen
- Tideflex ValvesDokument9 SeitenTideflex ValvesChee Fong MakeNoch keine Bewertungen
- Question 11 - Regulation For PollutionDokument2 SeitenQuestion 11 - Regulation For PollutionChee Fong MakeNoch keine Bewertungen
- Question 14 - Irregular Proposal Vs Professional EthicsDokument3 SeitenQuestion 14 - Irregular Proposal Vs Professional EthicsChee Fong MakeNoch keine Bewertungen
- Question 15 - Virtual Lab For EngineeringDokument1 SeiteQuestion 15 - Virtual Lab For EngineeringChee Fong MakeNoch keine Bewertungen
- Question 12 - Cost Effective Vs HSEDokument2 SeitenQuestion 12 - Cost Effective Vs HSEChee Fong MakeNoch keine Bewertungen
- Question 9 - Good Quality Vs Profit of ProjectDokument2 SeitenQuestion 9 - Good Quality Vs Profit of ProjectChee Fong MakeNoch keine Bewertungen
- Question 7 - Corruption & Unethical PracticeDokument2 SeitenQuestion 7 - Corruption & Unethical PracticeChee Fong MakeNoch keine Bewertungen
- Question 2 - PrivatizationDokument2 SeitenQuestion 2 - PrivatizationChee Fong MakeNoch keine Bewertungen
- Question 8 - Ethical Consideration To Land ClearingDokument2 SeitenQuestion 8 - Ethical Consideration To Land ClearingChee Fong MakeNoch keine Bewertungen
- Question 5 - Positive Impact of Engineer To SocietyDokument3 SeitenQuestion 5 - Positive Impact of Engineer To SocietyChee Fong MakeNoch keine Bewertungen
- Question 4 - IEM Role in Promote ProfessionalismDokument1 SeiteQuestion 4 - IEM Role in Promote ProfessionalismChee Fong MakeNoch keine Bewertungen
- Question 10 - Conflicts of InterestDokument2 SeitenQuestion 10 - Conflicts of InterestChee Fong MakeNoch keine Bewertungen
- Question 6 - Engineer To Get ProjectDokument2 SeitenQuestion 6 - Engineer To Get ProjectChee Fong MakeNoch keine Bewertungen
- Question 1 - Cost Vs DesignDokument2 SeitenQuestion 1 - Cost Vs DesignChee Fong MakeNoch keine Bewertungen
- Question 3 - SafetyDokument2 SeitenQuestion 3 - SafetyChee Fong MakeNoch keine Bewertungen
- EC Declaration of Performance DRAMIX® 3D 80/60BL: Customer InformationDokument2 SeitenEC Declaration of Performance DRAMIX® 3D 80/60BL: Customer InformationChee Fong MakeNoch keine Bewertungen
- Thrust Block Design Thrust1E.XLS: Uncategorised Software All Users Are Responsible For Checking Their Own CalculationsDokument5 SeitenThrust Block Design Thrust1E.XLS: Uncategorised Software All Users Are Responsible For Checking Their Own CalculationsChee Fong MakeNoch keine Bewertungen
- Brickwall Stability Design CalculationDokument4 SeitenBrickwall Stability Design CalculationChee Fong MakeNoch keine Bewertungen
- Monier Guidetowindclassification V1web PDFDokument8 SeitenMonier Guidetowindclassification V1web PDFChee Fong MakeNoch keine Bewertungen
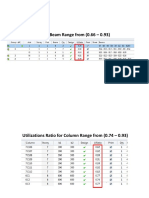
- Utilization RatioDokument4 SeitenUtilization RatioChee Fong MakeNoch keine Bewertungen
- Monier Guidetowindclassification V1web PDFDokument8 SeitenMonier Guidetowindclassification V1web PDFChee Fong MakeNoch keine Bewertungen
- Changjiang and Pearl RiverDokument3 SeitenChangjiang and Pearl RiverChee Fong MakeNoch keine Bewertungen
- River PDFDokument1 SeiteRiver PDFChee Fong MakeNoch keine Bewertungen
- Alejandro 2 - Refresher MATH PDFDokument2 SeitenAlejandro 2 - Refresher MATH PDFAlliah Mae OrtegaNoch keine Bewertungen
- SyllabusDokument2 SeitenSyllabusDeep BlueNoch keine Bewertungen
- An Alternative Method For The Removal of Surfactants From WaterDokument7 SeitenAn Alternative Method For The Removal of Surfactants From WatervahidNoch keine Bewertungen
- St501-Ln1kv 04fs EnglishDokument12 SeitenSt501-Ln1kv 04fs Englishsanthoshs241s0% (1)
- Experimental Performance Analysis of Flat Plate Solar Collectors Using Different NanofluidsDokument11 SeitenExperimental Performance Analysis of Flat Plate Solar Collectors Using Different NanofluidsDeep KambleNoch keine Bewertungen
- Boiler Feed Pump KSBDokument9 SeitenBoiler Feed Pump KSByogacruiseNoch keine Bewertungen
- Sri Chaitanya Physics Integer Type Question BANKkkkkkkkkkkkkkkkkkkkkkkkkkkkkkkkDokument74 SeitenSri Chaitanya Physics Integer Type Question BANKkkkkkkkkkkkkkkkkkkkkkkkkkkkkkkkSai GokulNoch keine Bewertungen
- Worzakowska2016 Article ThermalBehaviorDecompositionMeDokument10 SeitenWorzakowska2016 Article ThermalBehaviorDecompositionMeJavier Andres Munoz ChavesNoch keine Bewertungen
- Stream, Streak, PathlinesDokument4 SeitenStream, Streak, PathlineschauguleNoch keine Bewertungen
- 110 MBRSDokument4 Seiten110 MBRSknsvel20005966Noch keine Bewertungen
- Consulting Engineering SolutionsDokument28 SeitenConsulting Engineering SolutionsRamesh AnanthanarayananNoch keine Bewertungen
- Intro To PhysicsDokument3 SeitenIntro To PhysicsB.VNoch keine Bewertungen
- 18-202: Mathematical Foundations of Electrical EngineeringDokument29 Seiten18-202: Mathematical Foundations of Electrical EngineeringxxqwertyxxNoch keine Bewertungen
- Power System Engineering MaterialDokument6 SeitenPower System Engineering MaterialAshok SainiNoch keine Bewertungen
- Spirit and Soul of Elixir Alchemy-LibreDokument29 SeitenSpirit and Soul of Elixir Alchemy-LibreBhairava Bhairavesh100% (4)
- DM Water Tank SpecificationDokument9 SeitenDM Water Tank SpecificationManish PatelNoch keine Bewertungen
- RRB Junior Engineer Civil Solved Model Question Paper 5 PDFDokument18 SeitenRRB Junior Engineer Civil Solved Model Question Paper 5 PDFankit0076Noch keine Bewertungen
- 4B-Velocity Profiles (2021)Dokument18 Seiten4B-Velocity Profiles (2021)ArinaAdilaNoch keine Bewertungen
- Earth DamsDokument2 SeitenEarth DamsDeep DebnathNoch keine Bewertungen
- CIBSE Guide C PRT 1Dokument76 SeitenCIBSE Guide C PRT 1nubaz100% (1)
- BeerJohnson Vector Mechanics SampleDokument563 SeitenBeerJohnson Vector Mechanics SampleRamkumar S100% (3)
- Us2656248 PDFDokument4 SeitenUs2656248 PDFchuckannabelleNoch keine Bewertungen
- JSK Bio DataDokument23 SeitenJSK Bio DataSahithNoch keine Bewertungen
- Evs 1Dokument76 SeitenEvs 1AbhishekSinghNoch keine Bewertungen
- Bouncing Balls Gcse CourseworkDokument5 SeitenBouncing Balls Gcse Courseworkrhpvslnfg100% (2)
- Design Guideline For Hydraulic Fluid CleanlinessDokument24 SeitenDesign Guideline For Hydraulic Fluid CleanlinessCarlosNoch keine Bewertungen
- Material Clase 10 PDFDokument6 SeitenMaterial Clase 10 PDFStefany CorreaNoch keine Bewertungen
- Internship ReportDokument21 SeitenInternship Reportsaqib50% (2)
- Technical Documentation - Regulation (EU) N. 2281 - 2016 - NECS 1314 - 3218 SEERDokument59 SeitenTechnical Documentation - Regulation (EU) N. 2281 - 2016 - NECS 1314 - 3218 SEERAlexandru GNoch keine Bewertungen
- T40 ManualDokument3 SeitenT40 ManualJames RobertsNoch keine Bewertungen