Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- EECS 373 Microelectronics Lab - BusesDokument12 SeitenEECS 373 Microelectronics Lab - BusesyogapostNoch keine Bewertungen
- EECS 332 - Summary of FormulaeDokument11 SeitenEECS 332 - Summary of FormulaeyogapostNoch keine Bewertungen
- The Value of EngineersDokument4 SeitenThe Value of EngineersyogapostNoch keine Bewertungen
- EECS 332 Equation Sheet1Dokument4 SeitenEECS 332 Equation Sheet1yogapostNoch keine Bewertungen
- How To Be A High FlyerDokument2 SeitenHow To Be A High FlyeryogapostNoch keine Bewertungen
- EECS 332 Equation Sheet2Dokument2 SeitenEECS 332 Equation Sheet2yogapostNoch keine Bewertungen
- LotusEliseS1 ServiceManualDokument624 SeitenLotusEliseS1 ServiceManualyogapostNoch keine Bewertungen
- Nissan Leaf 2014 Workshop Manual - General PrecautionsDokument3 SeitenNissan Leaf 2014 Workshop Manual - General PrecautionsyogapostNoch keine Bewertungen
- 2014 Nissan Leaf Workshop Manual - Towing PrecautionsDokument1 Seite2014 Nissan Leaf Workshop Manual - Towing PrecautionsyogapostNoch keine Bewertungen
- MG ZS UK Maintenance Check Sheet V1.03 PDFDokument2 SeitenMG ZS UK Maintenance Check Sheet V1.03 PDFyogapost100% (1)
- 2014 Nissan Leaf Workshop Manual - Abbreviation ListDokument7 Seiten2014 Nissan Leaf Workshop Manual - Abbreviation ListyogapostNoch keine Bewertungen
- BEST AVAILABLE TECHNIQUES (BAT) GUIDANCE ON POWER GENERATION (DOE Malaysia)Dokument66 SeitenBEST AVAILABLE TECHNIQUES (BAT) GUIDANCE ON POWER GENERATION (DOE Malaysia)yogapostNoch keine Bewertungen
- Nissan Leaf 2014 Workshop Manual - Lifting PrecautionsDokument2 SeitenNissan Leaf 2014 Workshop Manual - Lifting PrecautionsyogapostNoch keine Bewertungen
- MG General Maintenance ManualDokument26 SeitenMG General Maintenance ManualyogapostNoch keine Bewertungen
- Beano 2020 - The Teacher Who Came To TeaDokument38 SeitenBeano 2020 - The Teacher Who Came To Teayogapost100% (1)
- MG ZS ZE Owners ManualDokument333 SeitenMG ZS ZE Owners ManualyogapostNoch keine Bewertungen
- LotusEliseS1 ServiceManualDokument624 SeitenLotusEliseS1 ServiceManualyogapostNoch keine Bewertungen
- Competitions Open To UK and Republic of Ireland Residents Only, Unless Otherwise StatedDokument36 SeitenCompetitions Open To UK and Republic of Ireland Residents Only, Unless Otherwise Statedyogapost100% (2)
- BeanoDokument36 SeitenBeanoyogapost100% (2)
- BeanoDokument36 SeitenBeanoyogapost100% (3)
- Nissan Leaf 2020 Service Maintenance GuideDokument44 SeitenNissan Leaf 2020 Service Maintenance GuideyogapostNoch keine Bewertungen
- Daihatsu K3-Vet Engine Mechanical Manual BookDokument71 SeitenDaihatsu K3-Vet Engine Mechanical Manual Bookbjr662788% (32)
- Doepke 09949367 DBL enDokument3 SeitenDoepke 09949367 DBL enyogapostNoch keine Bewertungen
- User's Manual FLIR ONE SeriesDokument26 SeitenUser's Manual FLIR ONE SeriesyogapostNoch keine Bewertungen
- Laugh & Play (Cleo & Cuquin Theme Song)Dokument1 SeiteLaugh & Play (Cleo & Cuquin Theme Song)yogapostNoch keine Bewertungen
- Doepke 09949367 DBL enDokument3 SeitenDoepke 09949367 DBL enyogapostNoch keine Bewertungen
- BEM Guide To Engineering Practice For M&E EngineersDokument48 SeitenBEM Guide To Engineering Practice For M&E EngineersBenrauf ProjectNoch keine Bewertungen
- 1730 Cmeng0000Dokument30 Seiten1730 Cmeng0000Bogdan IlieNoch keine Bewertungen
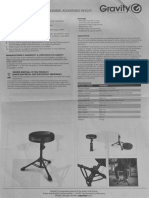
- Gravity Musician Stool User ManualDokument1 SeiteGravity Musician Stool User ManualyogapostNoch keine Bewertungen
- Adorefit Assistant Loop Band User ManualDokument2 SeitenAdorefit Assistant Loop Band User ManualyogapostNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Bindoy Local Civil Registrar Record Management System - CharessDokument103 SeitenBindoy Local Civil Registrar Record Management System - CharessJohn Venheart Alejo86% (7)
- Analysis of Algorithms: DR - Eid RehmanDokument8 SeitenAnalysis of Algorithms: DR - Eid RehmanOnsa piarusNoch keine Bewertungen
- Python Pandas HandsonDokument6 SeitenPython Pandas Handsonmohamed yasinNoch keine Bewertungen
- SEG-D, Rev 2: SEG Field Tape Standards December, 1996Dokument65 SeitenSEG-D, Rev 2: SEG Field Tape Standards December, 1996Liavon SokalNoch keine Bewertungen
- 4M Parts Warehouse Selects Epicor Vision NR ENS 021412Dokument2 Seiten4M Parts Warehouse Selects Epicor Vision NR ENS 021412Sergio Espinoza MéndezNoch keine Bewertungen
- Tle CSS9 Q2 M1Dokument15 SeitenTle CSS9 Q2 M1yvon maccella fernandoNoch keine Bewertungen
- KyrsDokument20 SeitenKyrssayed100% (1)
- Pedsim: Quick Start GuideDokument6 SeitenPedsim: Quick Start GuideAntonio C. KeithNoch keine Bewertungen
- Cheat Sheet:: Markup and Code in A Single FileDokument2 SeitenCheat Sheet:: Markup and Code in A Single FileElbinHasićNoch keine Bewertungen
- Experiment No. 6 Design and Implementation of Shift RegistersDokument17 SeitenExperiment No. 6 Design and Implementation of Shift RegistersRaghuveerNoch keine Bewertungen
- CTNet User Guide Iss8Dokument82 SeitenCTNet User Guide Iss8jocapadialNoch keine Bewertungen
- Computer Fundamentals and Programming in C: Reema TharejaDokument19 SeitenComputer Fundamentals and Programming in C: Reema TharejaChandan Nagesh0% (1)
- Multi-Channel, Multi-Band High Power Base Station: Nyxcell V800 & F800Dokument2 SeitenMulti-Channel, Multi-Band High Power Base Station: Nyxcell V800 & F800Анатолий РемневNoch keine Bewertungen
- Manual CPC 100Dokument329 SeitenManual CPC 100Angie GinethNoch keine Bewertungen
- 4.3.8 Packet Tracer - Configure Layer 3 Switching and Inter-VLAN RoutingDokument6 Seiten4.3.8 Packet Tracer - Configure Layer 3 Switching and Inter-VLAN RoutingEmily GabrielaNoch keine Bewertungen
- GP Systems Interface Requirements v1 - Draft11Dokument22 SeitenGP Systems Interface Requirements v1 - Draft11EwanDavisNoch keine Bewertungen
- HCVR 4216A-S3 CompletoDokument3 SeitenHCVR 4216A-S3 CompletoArenas XiiNoch keine Bewertungen
- PISO WiFi Datasheet - FAQs PDFDokument2 SeitenPISO WiFi Datasheet - FAQs PDFCavinti LagunaNoch keine Bewertungen
- BladeSystem Firmware Update ProcedureDokument55 SeitenBladeSystem Firmware Update Procedurests100Noch keine Bewertungen
- Machine Learning Approach To Select Optimal Task Scheduling Algorithm in CloudDokument16 SeitenMachine Learning Approach To Select Optimal Task Scheduling Algorithm in CloudKaouther BenaliNoch keine Bewertungen
- Build: "Webpack ./src/app - Js ./dist/bundle - JS": Code On DemandDokument4 SeitenBuild: "Webpack ./src/app - Js ./dist/bundle - JS": Code On DemandECE ANoch keine Bewertungen
- SQL Server More Clause Part 2Dokument9 SeitenSQL Server More Clause Part 2Melisa May Ocampo AmpiloquioNoch keine Bewertungen
- 3C - 20 - Sairi Solikh - KUIS III Workshop Pemrograman MobileDokument15 Seiten3C - 20 - Sairi Solikh - KUIS III Workshop Pemrograman Mobileyoiki yakitoriNoch keine Bewertungen
- 07 Laboratory Exercise 1Dokument5 Seiten07 Laboratory Exercise 1kwalwalgud21Noch keine Bewertungen
- Big Data Mining, and AnalyticsDokument22 SeitenBig Data Mining, and AnalyticsAriadna Setentaytres100% (1)
- Study of Emissions From Cell Towers On Temecula Valley Unified School District PropertyDokument18 SeitenStudy of Emissions From Cell Towers On Temecula Valley Unified School District PropertyThe Press-Enterprise / pressenterprise.comNoch keine Bewertungen
- Inheritance JavaDokument10 SeitenInheritance Javaujjwol100% (1)
- Evermotion Archmodels Vol. 151Dokument27 SeitenEvermotion Archmodels Vol. 151AKASH SINGHNoch keine Bewertungen
- A P J Abdul Kalam Technological University 2020Dokument396 SeitenA P J Abdul Kalam Technological University 2020Shashank PriyadarshiNoch keine Bewertungen