Das könnte Ihnen auch gefallen
- T16 - Ci - PalloDokument9 SeitenT16 - Ci - PalloGaTo LokkoNoch keine Bewertungen
- Control Automatizado de PersianasDokument9 SeitenControl Automatizado de PersianasCarlos Quiroga FontechaNoch keine Bewertungen
- Practica 5. Garcia Gonzalez DaianaDokument10 SeitenPractica 5. Garcia Gonzalez DaianaMichel IslasNoch keine Bewertungen
- Actividad 4Dokument9 SeitenActividad 4Jerson 5Noch keine Bewertungen
- Practica 6 LDSMDokument13 SeitenPractica 6 LDSMOscar MedellinNoch keine Bewertungen
- Informe de La Araña RobóticaDokument25 SeitenInforme de La Araña Robóticasebastian100% (1)
- Informe Control de FaseDokument7 SeitenInforme Control de FaseEfren QuilumbaNoch keine Bewertungen
- VFD Arduino PDFDokument26 SeitenVFD Arduino PDFJose LunaNoch keine Bewertungen
- Brazo Robotico.Dokument8 SeitenBrazo Robotico.Antonio LopezNoch keine Bewertungen
- Variador de VelocidadDokument26 SeitenVariador de VelocidadXfrali Medina GuevaraNoch keine Bewertungen
- Informe Control de FaseDokument10 SeitenInforme Control de FaseFernanda MorenoNoch keine Bewertungen
- Practica 7 MSGTDokument13 SeitenPractica 7 MSGTMelanie Sarahi González TovarNoch keine Bewertungen
- Proyecto PDFDokument22 SeitenProyecto PDFKelvin Pantaleon RiofrioNoch keine Bewertungen
- T1 Robotica Industrial - ServomotoresDokument83 SeitenT1 Robotica Industrial - Servomotoressilverio17antezanaNoch keine Bewertungen
- Pract2 DSMDokument9 SeitenPract2 DSMMiguel SalasNoch keine Bewertungen
- Echegaray y YoDokument14 SeitenEchegaray y YoAldahir SoriaNoch keine Bewertungen
- Variador Velocidad MaquinasDokument9 SeitenVariador Velocidad MaquinasJm DsoNoch keine Bewertungen
- Robotica AvanzadaDokument56 SeitenRobotica AvanzadaIng Jusarez100% (1)
- Informelaboratorio AndresHuancaOsinagaDokument10 SeitenInformelaboratorio AndresHuancaOsinagaCristian SotoNoch keine Bewertungen
- SERVOMOTORDokument7 SeitenSERVOMOTORRogelio MtzNoch keine Bewertungen
- Servomotores ResumenDokument4 SeitenServomotores ResumenNaty FajardoNoch keine Bewertungen
- Servo Control 1Dokument10 SeitenServo Control 1Cupyl LunaNoch keine Bewertungen
- Tarea 3.3 de JulioDokument7 SeitenTarea 3.3 de JulioGOMEZ CASTILLO RAFAEL UT AltamiraNoch keine Bewertungen
- ControladoresDokument17 SeitenControladoresZuri BouvierNoch keine Bewertungen
- Funcionamiento de Un Servo MotorDokument6 SeitenFuncionamiento de Un Servo MotorjoselinNoch keine Bewertungen
- Tipos de ServomotoresDokument12 SeitenTipos de ServomotoresKarlito Sylar50% (2)
- Reporte de Practica PWM 555Dokument16 SeitenReporte de Practica PWM 555kike15975% (4)
- Servo Motor and Step Motor.Dokument33 SeitenServo Motor and Step Motor.Call Lopez LopezNoch keine Bewertungen
- Practica 5 Actuadores YISEDokument9 SeitenPractica 5 Actuadores YISEYoselin SantiagoNoch keine Bewertungen
- Lab #5 Electrónica de PotenciaDokument14 SeitenLab #5 Electrónica de PotenciaAna AspedillaNoch keine Bewertungen
- Producto Integrador de Aprendizaje: Equipo#2 TDE (V5) GRUPO 001 Docente: Jesus Daniel Garza Camarena FECHA: 02/JUNIO/2022Dokument24 SeitenProducto Integrador de Aprendizaje: Equipo#2 TDE (V5) GRUPO 001 Docente: Jesus Daniel Garza Camarena FECHA: 02/JUNIO/2022Homero GabrielNoch keine Bewertungen
- Titulo Del PrototipoDokument4 SeitenTitulo Del PrototipoErnesto FloresNoch keine Bewertungen
- Reporte PWMDokument19 SeitenReporte PWMbigircus88Noch keine Bewertungen
- Control de Velocidad y Posición de Un Motor DCDokument56 SeitenControl de Velocidad y Posición de Un Motor DCromulozg100% (1)
- Automatizacion de Un Porton de Garaje Empleando El (PLC)Dokument23 SeitenAutomatizacion de Un Porton de Garaje Empleando El (PLC)cristhian_22Noch keine Bewertungen
- Manejadores de PotenciaDokument8 SeitenManejadores de PotenciaPaco AlcedaNoch keine Bewertungen
- Módulo de SensadoDokument9 SeitenMódulo de SensadogalileoNoch keine Bewertungen
- Conversor DC DCDokument12 SeitenConversor DC DCPancho BustamanteNoch keine Bewertungen
- Practica 4 Lds MDokument9 SeitenPractica 4 Lds MOscar MedellinNoch keine Bewertungen
- Practica 1Dokument17 SeitenPractica 1Israel RCNoch keine Bewertungen
- Sol FinalDokument7 SeitenSol FinalSelena ZepitaNoch keine Bewertungen
- Practica 2 ServomecanismosDokument22 SeitenPractica 2 ServomecanismosJorge PozosNoch keine Bewertungen
- U2 ServomotoresDokument18 SeitenU2 ServomotoresMiguel Agustin GerezNoch keine Bewertungen
- Servomotores Eléctricos PDFDokument17 SeitenServomotores Eléctricos PDFbrianj010% (1)
- Servo Motor EsDokument4 SeitenServo Motor EsEfrain Herrera RodriguezNoch keine Bewertungen
- Reporte #10Dokument14 SeitenReporte #10juan_samaniego_60Noch keine Bewertungen
- Practica de Laboratorio 8Dokument12 SeitenPractica de Laboratorio 8Jaiyim villalobosNoch keine Bewertungen
- Proyecto Motor GeneradorDokument26 SeitenProyecto Motor Generadorjulian sanchezNoch keine Bewertungen
- INTRODUCCIÓN A LA ROBÓTICApractica6Dokument10 SeitenINTRODUCCIÓN A LA ROBÓTICApractica6WeMakeThisZhit StoreNoch keine Bewertungen
- Seguidor de Linea (Gamc)Dokument25 SeitenSeguidor de Linea (Gamc)Gato Alvear50% (2)
- Servomotores - Composición y FuncionamientoDokument5 SeitenServomotores - Composición y FuncionamientoJosé Quetzalcoatl Ramírez JuradoNoch keine Bewertungen
- Servo ControlDokument14 SeitenServo ControlWILLIAMS CABRERANoch keine Bewertungen
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Von EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Noch keine Bewertungen
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209Von EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Bewertung: 1 von 5 Sternen1/5 (2)
- Montaje de centros de transformación. ELEE0209Von EverandMontaje de centros de transformación. ELEE0209Noch keine Bewertungen
- 100 Circuitos de Shields para MotoresVon Everand100 Circuitos de Shields para MotoresBewertung: 4.5 von 5 Sternen4.5/5 (4)
- Montaje y mantenimiento de transformadores. ELEE0109Von EverandMontaje y mantenimiento de transformadores. ELEE0109Noch keine Bewertungen
- Curso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoVon EverandCurso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoNoch keine Bewertungen
- Proyectos de instalaciones eléctrica de baja tensiónVon EverandProyectos de instalaciones eléctrica de baja tensiónBewertung: 5 von 5 Sternen5/5 (1)
- CV MelDokument1 SeiteCV MelAlex JavierNoch keine Bewertungen
- Inspeccion de OxicorteDokument1 SeiteInspeccion de OxicorteAlex JavierNoch keine Bewertungen
- Generación Eólica DomesticaDokument12 SeitenGeneración Eólica DomesticaAlex JavierNoch keine Bewertungen
- Inspeccion de ExtintoresDokument9 SeitenInspeccion de ExtintoresAlex JavierNoch keine Bewertungen
- InspeccionDokument9 SeitenInspeccionAlex JavierNoch keine Bewertungen
- Formato Anexo 3Dokument2 SeitenFormato Anexo 3Alex JavierNoch keine Bewertungen
- Exoneracion Voluntaria de Examen de Retiro - GGMDokument1 SeiteExoneracion Voluntaria de Examen de Retiro - GGMAlex JavierNoch keine Bewertungen
- Ejercicio ManttoDokument5 SeitenEjercicio ManttoAlex JavierNoch keine Bewertungen
- SeguridadDokument3 SeitenSeguridadAlex JavierNoch keine Bewertungen
- Desempeño Seminario 2018 IIDokument2 SeitenDesempeño Seminario 2018 IIAlex JavierNoch keine Bewertungen
- Monografia Instalación AerogeneradorDokument2 SeitenMonografia Instalación AerogeneradorAlex JavierNoch keine Bewertungen
- Generación Eólica DomesticaDokument12 SeitenGeneración Eólica DomesticaAlex JavierNoch keine Bewertungen
- Monografia Instalación AerogeneradorDokument10 SeitenMonografia Instalación AerogeneradorAlex JavierNoch keine Bewertungen
- SeguridadDokument3 SeitenSeguridadAlex JavierNoch keine Bewertungen
- Trabajo Mantenimiento OficialDokument32 SeitenTrabajo Mantenimiento OficialAlex JavierNoch keine Bewertungen
- Monografia Instalación AerogeneradorDokument2 SeitenMonografia Instalación AerogeneradorAlex JavierNoch keine Bewertungen
- Monografia Instalación AerogeneradorDokument10 SeitenMonografia Instalación AerogeneradorAlex JavierNoch keine Bewertungen
- Marco TeoricoDokument6 SeitenMarco TeoricoAlex JavierNoch keine Bewertungen
- Ejercicio ManttoDokument3 SeitenEjercicio ManttoAlex JavierNoch keine Bewertungen
- Monografia Instalación AerogeneradorDokument10 SeitenMonografia Instalación AerogeneradorAlex JavierNoch keine Bewertungen
- Seguridad InduatailDokument3 SeitenSeguridad InduatailAlex JavierNoch keine Bewertungen
- Trabajo 2 EconomiaDokument3 SeitenTrabajo 2 EconomiaAlex Javier100% (3)
- SeguridadDokument3 SeitenSeguridadAlex JavierNoch keine Bewertungen
- Trabajo Mantenimiento OficialDokument16 SeitenTrabajo Mantenimiento OficialAlex JavierNoch keine Bewertungen
- Trabajo 2 EconomiaDokument3 SeitenTrabajo 2 EconomiaAlex Javier100% (3)
- La Auditoria Melissa1Dokument3 SeitenLa Auditoria Melissa1Alex JavierNoch keine Bewertungen
- ManteeDokument19 SeitenManteeAlex JavierNoch keine Bewertungen
- Trabajo Mantenimiento OficialDokument16 SeitenTrabajo Mantenimiento OficialAlex JavierNoch keine Bewertungen
- Modulo2 T.FDokument2 SeitenModulo2 T.FAlex JavierNoch keine Bewertungen
- Solicitud de PermisoDokument1 SeiteSolicitud de PermisoAlex Javier100% (1)
- Gabriela Mendizabal Bermúdez ALfredo Sánchez-Castañeda y Patricia Kurczyn Villalobos - 2019 - Industria 4.0. Trabajo y Seguridad SocialDokument455 SeitenGabriela Mendizabal Bermúdez ALfredo Sánchez-Castañeda y Patricia Kurczyn Villalobos - 2019 - Industria 4.0. Trabajo y Seguridad Socialjuan pabloNoch keine Bewertungen
- 88 39 PBDokument78 Seiten88 39 PBDianita tkmNoch keine Bewertungen
- Datos de Transmision Bombas de Pulpa MoliendaDokument2 SeitenDatos de Transmision Bombas de Pulpa MoliendaJuan Pablo Diaz ChigneNoch keine Bewertungen
- CAlculo de Potencia en OsciloscopioDokument35 SeitenCAlculo de Potencia en OsciloscopioLinda Vanegas50% (2)
- TEPS GM 3126E EntrenamientoDokument142 SeitenTEPS GM 3126E EntrenamientoARMANDO HERNANDEZ100% (1)
- Accesorios HidraulicosDokument14 SeitenAccesorios HidraulicosAbimael GarayNoch keine Bewertungen
- Definicion de TicsDokument4 SeitenDefinicion de TicsmishellgomezNoch keine Bewertungen
- Farro Zulueta Abel Elvis - 155604h - Maquinas en Los Diferentes CultivosDokument9 SeitenFarro Zulueta Abel Elvis - 155604h - Maquinas en Los Diferentes CultivosSANTOS NICOLAS DE LA CRUZNoch keine Bewertungen
- VinvulaciónDokument18 SeitenVinvulacióncl.luis04Noch keine Bewertungen
- Cadena de Suministro PRESENTACIONDokument30 SeitenCadena de Suministro PRESENTACIONSergio JavierNoch keine Bewertungen
- Cotización de Lubricantes Castrol - AZUL CONCRETO - #01Dokument1 SeiteCotización de Lubricantes Castrol - AZUL CONCRETO - #01Gabriel ZucchiNoch keine Bewertungen
- El Uso de Las Tic en La Vida CotidianaDokument8 SeitenEl Uso de Las Tic en La Vida Cotidianamayra peña perezNoch keine Bewertungen
- ChanelDokument6 SeitenChanelbrizeyri espinosaNoch keine Bewertungen
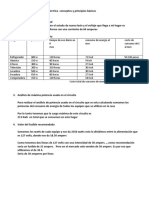
- Practica de Curso EDX Energia Eléctrica Conceptos y Principios BásicosDokument2 SeitenPractica de Curso EDX Energia Eléctrica Conceptos y Principios BásicosBrunoNoch keine Bewertungen
- OBS - MPM - Caso Apolo 13 v10.1Dokument10 SeitenOBS - MPM - Caso Apolo 13 v10.1Denilson Alexander Barre Araujo100% (1)
- Lineas de La Investigación en ArquitecturaDokument6 SeitenLineas de La Investigación en ArquitecturaEnrique GChNoch keine Bewertungen
- INFORME DE LABORATORIO No 1. MANEJO DE PHET, TINKERCAD Y SOLVE ELECDokument9 SeitenINFORME DE LABORATORIO No 1. MANEJO DE PHET, TINKERCAD Y SOLVE ELECOLNEDYS DEL CARMEN MILLAN POLONoch keine Bewertungen
- IP071-CP-Caso-practico PSICOSOCIOLOGÍA APLICADADokument2 SeitenIP071-CP-Caso-practico PSICOSOCIOLOGÍA APLICADAMario Alberto Ibañez Saumeth100% (1)
- Memorias de Calculo - Policlinico TalaraDokument19 SeitenMemorias de Calculo - Policlinico TalaraMiguel AlvarezNoch keine Bewertungen
- Pa 03 - Laboratorio de Innovacion EnviarDokument8 SeitenPa 03 - Laboratorio de Innovacion EnviarZAIDA YUDY HUARANCCA TAPARANoch keine Bewertungen
- Instituto Superior Tecnológico Bolivariano: Instructivo Del Proyecto Final de Administración IDokument28 SeitenInstituto Superior Tecnológico Bolivariano: Instructivo Del Proyecto Final de Administración Ilayla estradaNoch keine Bewertungen
- Ficha Técnica BMW 120ia (5puertas) Sport Line 2018.PDF - Asset.1507330572071Dokument2 SeitenFicha Técnica BMW 120ia (5puertas) Sport Line 2018.PDF - Asset.1507330572071Juan ValdezNoch keine Bewertungen
- Saber Electrónica #287 Edición ArgentinaDokument85 SeitenSaber Electrónica #287 Edición ArgentinaAlbert Eistein100% (14)
- El Software Libre y Su Rol en El Desarrollo Tecnologico Del PaisDokument2 SeitenEl Software Libre y Su Rol en El Desarrollo Tecnologico Del PaisEduardo100% (2)
- Cap85a TDDokument31 SeitenCap85a TDAmilcar MonteroNoch keine Bewertungen
- Sulfuro de Hidrogeno DM-600IS-H2SDokument1 SeiteSulfuro de Hidrogeno DM-600IS-H2SjeancasalNoch keine Bewertungen
- 16 27 PLDokument22 Seiten16 27 PLArmando ElrepulgueNoch keine Bewertungen
- Analisissubpresupuestovarios 01 ColparDokument104 SeitenAnalisissubpresupuestovarios 01 ColparDajhanna Grados AlvaradoNoch keine Bewertungen
- Rivet 2010 Estaciones de PolinesDokument2 SeitenRivet 2010 Estaciones de PolinesJean Carlos MujicaNoch keine Bewertungen
- Gestion de Aprovisionamiento - Pedido de CompraDokument17 SeitenGestion de Aprovisionamiento - Pedido de CompraUrcia FranciscoNoch keine Bewertungen