Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- MachineDokument1 SeiteMachineAkhilesh Kumar MishraNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- ApplicationDokument1 SeiteApplicationAkhilesh Kumar MishraNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Drawing:: SG01 (20KAF) - 3P001-000 SPG30-20KDokument1 SeiteDrawing:: SG01 (20KAF) - 3P001-000 SPG30-20KAkhilesh Kumar MishraNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
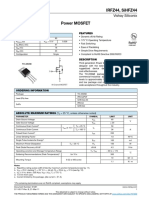
- Irfz44, Sihfz44: Vishay SiliconixDokument9 SeitenIrfz44, Sihfz44: Vishay SiliconixAkhilesh Kumar MishraNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Figure 1Dokument5 SeitenFigure 1Akhilesh Kumar MishraNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- PapersDokument2 SeitenPapersAkhilesh Kumar MishraNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- PapersDokument2 SeitenPapersAkhilesh Kumar MishraNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Relaxed Ziegler-Nichols Closed Loop Tuning of PI ControllersDokument15 SeitenRelaxed Ziegler-Nichols Closed Loop Tuning of PI ControllersAkhilesh Kumar MishraNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Mi 2Dokument25 SeitenMi 2Akhilesh Kumar MishraNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- 2Dokument3 Seiten2Akhilesh Kumar MishraNoch keine Bewertungen
- Ee 1002Dokument108 SeitenEe 1002Akhilesh Kumar MishraNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Dongalia, Distt. Khandwa (M.P) : Unit 1: December 2012 (COD) 2: March2013 (COD)Dokument2 SeitenDongalia, Distt. Khandwa (M.P) : Unit 1: December 2012 (COD) 2: March2013 (COD)Akhilesh Kumar MishraNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- 8 Permutation & Combination Part 1 of 4Dokument5 Seiten8 Permutation & Combination Part 1 of 4Akhilesh Kumar MishraNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Keep 207Dokument15 SeitenKeep 207Akhilesh Kumar MishraNoch keine Bewertungen
- UntitledDokument2 SeitenUntitledAkhilesh Kumar MishraNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Experiment No: Object:-RequirementsDokument4 SeitenExperiment No: Object:-RequirementsAkhilesh Kumar MishraNoch keine Bewertungen
- Test 2Dokument2 SeitenTest 2Akhilesh Kumar MishraNoch keine Bewertungen
- PaperDokument7 SeitenPaperAkhilesh Kumar MishraNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Personal Detail: Online (Payment ID: 39818385 - Fee Amout: Rs. 1000/-)Dokument2 SeitenPersonal Detail: Online (Payment ID: 39818385 - Fee Amout: Rs. 1000/-)Akhilesh Kumar MishraNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- QhlogsDokument1 SeiteQhlogsMohit KoladiaNoch keine Bewertungen
- Lecture Notes ME 269: Ayman El-Hag DC Machine Part No. 1 Basic Principles and Physical ConstructionDokument17 SeitenLecture Notes ME 269: Ayman El-Hag DC Machine Part No. 1 Basic Principles and Physical ConstructionAkhilesh Kumar MishraNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Experiment No: Object Requirement:-S.N. Apparatus Type Range Qty. RemarkDokument4 SeitenExperiment No: Object Requirement:-S.N. Apparatus Type Range Qty. RemarkAkhilesh Kumar MishraNoch keine Bewertungen
- Academy of Technology,: Proctorial Board Cum Anti Ragging Committee SESSION - 2010-11Dokument1 SeiteAcademy of Technology,: Proctorial Board Cum Anti Ragging Committee SESSION - 2010-11Akhilesh Kumar MishraNoch keine Bewertungen
- PN DiodeDokument4 SeitenPN DiodeAkhilesh Kumar MishraNoch keine Bewertungen
- Experiment No Object:-: Requirement:-S.n. Name of Apparatus Type Range/rating Qty RemarkDokument4 SeitenExperiment No Object:-: Requirement:-S.n. Name of Apparatus Type Range/rating Qty RemarkAkhilesh Kumar MishraNoch keine Bewertungen
- Objective: .: Electrical Engineering Department Network LabDokument2 SeitenObjective: .: Electrical Engineering Department Network LabAkhilesh Kumar MishraNoch keine Bewertungen
- Experiment No Object:-Requirement:-: S.N. Apparatus Type Range Qty. RemarkDokument2 SeitenExperiment No Object:-Requirement:-: S.N. Apparatus Type Range Qty. RemarkAkhilesh Kumar MishraNoch keine Bewertungen
- Experiment No: Verification of Kirchhoff's Voltage Law (KVL) Requirement:-S.n. Name of Equipment Type Range Qty. RemarkDokument3 SeitenExperiment No: Verification of Kirchhoff's Voltage Law (KVL) Requirement:-S.n. Name of Equipment Type Range Qty. RemarkAkhilesh Kumar MishraNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Objective:: TheoryDokument5 SeitenObjective:: TheoryAkhilesh Kumar MishraNoch keine Bewertungen
- 1.refactoring: Refactoring Is A Technique Where You Make A Small Change To YourDokument4 Seiten1.refactoring: Refactoring Is A Technique Where You Make A Small Change To YourBhanu MuppanaNoch keine Bewertungen
- SDLC Phases & Models of Software Development Life CycleDokument7 SeitenSDLC Phases & Models of Software Development Life CycleLokesh KNoch keine Bewertungen
- Aspen Hysys (Level 1)Dokument1 SeiteAspen Hysys (Level 1)Sanni Tajudeen OlugbengaNoch keine Bewertungen
- CNN Basic Beak of BirdDokument20 SeitenCNN Basic Beak of BirdPoralla priyanka100% (1)
- Students Guide To Classical ControlDokument5 SeitenStudents Guide To Classical ControlmixarimNoch keine Bewertungen
- Mid-Term ExamDokument3 SeitenMid-Term Exambipico9217Noch keine Bewertungen
- Control SystemsDokument3 SeitenControl SystemsselvajothiNoch keine Bewertungen
- Filled Notes For Chapter 17Dokument5 SeitenFilled Notes For Chapter 17frtisNoch keine Bewertungen
- Tech Predictions Report 2023Dokument40 SeitenTech Predictions Report 2023RUTH YALENA ZULETA TORRESNoch keine Bewertungen
- OOAD NOTES RejinpaulDokument92 SeitenOOAD NOTES RejinpaulmydummymailNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- ReportingDokument42 SeitenReportingBarbeth Ragusta CampoganNoch keine Bewertungen
- What Is Kaizen MethodDokument6 SeitenWhat Is Kaizen MethodGudetaNoch keine Bewertungen
- SAP Testing Roles and ResponsibilitiesDokument3 SeitenSAP Testing Roles and ResponsibilitiesAnonymous 0wXXmp1Noch keine Bewertungen
- Software Design Quality Metrics For Web Based SystemsDokument143 SeitenSoftware Design Quality Metrics For Web Based SystemsKurdeen KhairyNoch keine Bewertungen
- Dumpstate BoardDokument2 SeitenDumpstate BoardAvaz SharifboevNoch keine Bewertungen
- Sdi Scilabtec2013Dokument33 SeitenSdi Scilabtec2013233701Noch keine Bewertungen
- 04 - A Framework For Usable and Secure PDFDokument243 Seiten04 - A Framework For Usable and Secure PDFAB DSNoch keine Bewertungen
- CnotesDokument552 SeitenCnotesPurple RainNoch keine Bewertungen
- Forichi L CVDokument2 SeitenForichi L CVsnow ivoryNoch keine Bewertungen
- CAIS 04 Carey Etal HCI in Is CurriculaDokument24 SeitenCAIS 04 Carey Etal HCI in Is CurriculaPako MogotsiNoch keine Bewertungen
- JNTU Hyderabd Software Engineering SyllabusDokument2 SeitenJNTU Hyderabd Software Engineering SyllabusKarumuri Sri Rama MurthyNoch keine Bewertungen
- Mastering Object-Oriented Analysis and Design With UMLDokument68 SeitenMastering Object-Oriented Analysis and Design With UMLChi Nguyễn NgọcNoch keine Bewertungen
- IT-34 KNOWLEDGE REPRESENTATION AND Management PapersDokument4 SeitenIT-34 KNOWLEDGE REPRESENTATION AND Management Paperscokog41585Noch keine Bewertungen
- Csci 565 Fall 2012 H.RezaDokument57 SeitenCsci 565 Fall 2012 H.RezaRohit KhuranaNoch keine Bewertungen
- Expert Systems and Applied Artificial Intelligence PDFDokument2 SeitenExpert Systems and Applied Artificial Intelligence PDFStephanieNoch keine Bewertungen
- Notes On Backpropagation: Peter.j.sadowski@uci - EduDokument3 SeitenNotes On Backpropagation: Peter.j.sadowski@uci - Edujoeyb379Noch keine Bewertungen
- Class 9 Domains of AIDokument28 SeitenClass 9 Domains of AIdhanvanth dhanvanthNoch keine Bewertungen
- OOAD SyllabusDokument2 SeitenOOAD SyllabusnvishnudeviNoch keine Bewertungen
- Nbnfi Fe2020120799638Dokument7 SeitenNbnfi Fe2020120799638Jerome PolicarpioNoch keine Bewertungen
- Project Schedule Critical Path and GanttDokument21 SeitenProject Schedule Critical Path and GanttJustus OtungaNoch keine Bewertungen
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesVon EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesBewertung: 5 von 5 Sternen5/5 (1)
- Electronics All-in-One For Dummies, 3rd EditionVon EverandElectronics All-in-One For Dummies, 3rd EditionBewertung: 5 von 5 Sternen5/5 (2)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosVon EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosBewertung: 5 von 5 Sternen5/5 (1)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsVon EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsBewertung: 3.5 von 5 Sternen3.5/5 (2)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialVon EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialBewertung: 3.5 von 5 Sternen3.5/5 (3)
- Analog Design and Simulation Using OrCAD Capture and PSpiceVon EverandAnalog Design and Simulation Using OrCAD Capture and PSpiceNoch keine Bewertungen