Das könnte Ihnen auch gefallen
- US9874257Dokument8 SeitenUS9874257marcglebNoch keine Bewertungen
- US4331221Dokument12 SeitenUS4331221marcglebNoch keine Bewertungen
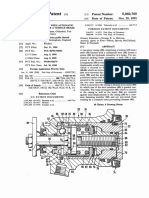
- US5060765Dokument12 SeitenUS5060765marcglebNoch keine Bewertungen
- US9850967Dokument8 SeitenUS9850967marcglebNoch keine Bewertungen
- EP1469240A1Dokument12 SeitenEP1469240A1marcglebNoch keine Bewertungen
- Kilic Clutch 2016Dokument7 SeitenKilic Clutch 2016marcglebNoch keine Bewertungen
- Thermal Behavior of Friction Clutch DiscDokument11 SeitenThermal Behavior of Friction Clutch DiscmarcglebNoch keine Bewertungen
- 402-2 - SAF Warranty Handling Shock AbsorberDokument13 Seiten402-2 - SAF Warranty Handling Shock AbsorbermarcglebNoch keine Bewertungen
- Attestination: WoniniDokument22 SeitenAttestination: WoninimarcglebNoch keine Bewertungen
- Engineering Mechanics 2016: 22 International ConferenceDokument4 SeitenEngineering Mechanics 2016: 22 International ConferencemarcglebNoch keine Bewertungen
- Stifness and Damping Characteristics of Rubber PDFDokument14 SeitenStifness and Damping Characteristics of Rubber PDFmarcglebNoch keine Bewertungen
- VW 1.9L TDI Installation NoticeDokument4 SeitenVW 1.9L TDI Installation Noticemarcgleb100% (1)
- Clutch TS Guide 8 PDFDokument84 SeitenClutch TS Guide 8 PDFmarcglebNoch keine Bewertungen
- Fault Finding Guide WebDokument39 SeitenFault Finding Guide Webmarcgleb100% (1)
- KS Schadensbroschüre Englisch PDFDokument92 SeitenKS Schadensbroschüre Englisch PDFmarcglebNoch keine Bewertungen
- Engine Throtle FailureDokument2 SeitenEngine Throtle FailuremarcglebNoch keine Bewertungen
- Pierburg PG - Si - 0096 - 30304465Dokument1 SeitePierburg PG - Si - 0096 - 30304465marcglebNoch keine Bewertungen
- Why Bad Presentations Happen To Good Causes - Andy GoodmanDokument100 SeitenWhy Bad Presentations Happen To Good Causes - Andy GoodmanterryboothNoch keine Bewertungen
- A Guide To Facilitating Adult Learning PDFDokument30 SeitenA Guide To Facilitating Adult Learning PDFmarcgleb100% (1)
- Knowledge Comprehension Applications Analysis Synthesis EvaluationsDokument1 SeiteKnowledge Comprehension Applications Analysis Synthesis EvaluationsmarcglebNoch keine Bewertungen
- Procedure For Evaluation of Rubber Bushing ComponentsDokument12 SeitenProcedure For Evaluation of Rubber Bushing ComponentsmarcglebNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Noise ThermometerDokument1 SeiteNoise ThermometerMedika WisataNoch keine Bewertungen
- Unit IG2 Risk AssessmentDokument17 SeitenUnit IG2 Risk AssessmentAli Alahma100% (2)
- Cir317 Pans Ops-NoiseDokument88 SeitenCir317 Pans Ops-Noiseicyreg100% (1)
- Noise Barrier Design - Danish and Some European Examples - Report 174 PDFDokument58 SeitenNoise Barrier Design - Danish and Some European Examples - Report 174 PDFyurirostovNoch keine Bewertungen
- An Overview of IEC 6007610 Determination of Sound Levels of Power TransformersDokument3 SeitenAn Overview of IEC 6007610 Determination of Sound Levels of Power Transformersap1948Noch keine Bewertungen
- Archive of SID: Occupational Noise-Induced Hearing LossDokument8 SeitenArchive of SID: Occupational Noise-Induced Hearing LossReza SaputraNoch keine Bewertungen
- Assessment of Noise Pollution of Vedanta Thermal Power Plant, Jharsguda, Odisha, IndiaDokument13 SeitenAssessment of Noise Pollution of Vedanta Thermal Power Plant, Jharsguda, Odisha, IndiakaustavNoch keine Bewertungen
- PNS BAFS PAES 241 2018 Corn Combine Harvester SpecficationsDokument17 SeitenPNS BAFS PAES 241 2018 Corn Combine Harvester SpecficationsAlfredo CondeNoch keine Bewertungen
- Boll79 SuppressionAcousticNoiseSpectralSubtraction PDFDokument8 SeitenBoll79 SuppressionAcousticNoiseSpectralSubtraction PDFNguyễn Trí PhướcNoch keine Bewertungen
- AcousticsDokument25 SeitenAcoustics123john123Noch keine Bewertungen
- FG Wilson - Innovating, Improving, Introducing... 2506-E15 Powered Generating SetsDokument7 SeitenFG Wilson - Innovating, Improving, Introducing... 2506-E15 Powered Generating Setsmardalan nabisukNoch keine Bewertungen
- Fol English Book Leioa PDFDokument292 SeitenFol English Book Leioa PDFhonesti1313100% (1)
- Komatsu Pw130es 6k Operation Maintenance ManualDokument20 SeitenKomatsu Pw130es 6k Operation Maintenance Manualrichard100% (43)
- Plant and Equipment Risk Management Form: 1. Hazard Management Details - GeneralDokument9 SeitenPlant and Equipment Risk Management Form: 1. Hazard Management Details - GeneralJigar VekariyaNoch keine Bewertungen
- Notice: Airport Noise Compatibility Program: Columbia Metropolitan Airport, SCDokument5 SeitenNotice: Airport Noise Compatibility Program: Columbia Metropolitan Airport, SCJustia.comNoch keine Bewertungen
- Importance of Communication in Adult Education 1Dokument3 SeitenImportance of Communication in Adult Education 1OsaosNoch keine Bewertungen
- FX28, FX38, FX48, FX58 Forage HarvesterDokument380 SeitenFX28, FX38, FX48, FX58 Forage HarvesterTudor Liviu67% (3)
- Cambridge Work StudyDokument23 SeitenCambridge Work Studym3isd100% (1)
- CHAPTER 6 Workplace Environment and ErgonomicsDokument30 SeitenCHAPTER 6 Workplace Environment and Ergonomicsadlirazin24Noch keine Bewertungen
- Site Risk Register: Site Name: Rosebery ExDokument4 SeitenSite Risk Register: Site Name: Rosebery ExvatasaNoch keine Bewertungen
- Noise Guidance:: Developing A Noise Management PlanDokument45 SeitenNoise Guidance:: Developing A Noise Management PlanVNoch keine Bewertungen
- The Sound of Silence: Designing and Producing Silent TransformersDokument5 SeitenThe Sound of Silence: Designing and Producing Silent TransformersRezaNoch keine Bewertungen
- Operation Manual: HT551960 EnglishDokument136 SeitenOperation Manual: HT551960 EnglishvNoch keine Bewertungen
- Analysis of Audible Noise and Magnetic Fields: Vollmer Substation and Transmission Line ProjectDokument20 SeitenAnalysis of Audible Noise and Magnetic Fields: Vollmer Substation and Transmission Line ProjecteNoch keine Bewertungen
- Field Trip Report EportfolioDokument4 SeitenField Trip Report Eportfolioapi-295271022Noch keine Bewertungen
- Design in Ergonomics GuidelineDokument66 SeitenDesign in Ergonomics GuidelineAsmaa DalashNoch keine Bewertungen
- Kỳ Thi Chọn Học Sinh Giỏi Cấp Trường NĂM HỌC 2021 - 2022 Môn Thi: Tiếng Anh Lớp 11 ThptDokument8 SeitenKỳ Thi Chọn Học Sinh Giỏi Cấp Trường NĂM HỌC 2021 - 2022 Môn Thi: Tiếng Anh Lớp 11 ThptHuỳnh Thái Uyên PhươngNoch keine Bewertungen
- Room AcousticsDokument52 SeitenRoom AcousticsDavezel ZerxNoch keine Bewertungen
- Concept Analysis of NoiseDokument31 SeitenConcept Analysis of NoiseJeanette GallardoNoch keine Bewertungen
- Ig2 Forms Electronic Submission v5.1Dokument18 SeitenIg2 Forms Electronic Submission v5.1khanji33383Noch keine Bewertungen