Das könnte Ihnen auch gefallen
- Prise en Main de Microsoft Office Excel 2016Dokument713 SeitenPrise en Main de Microsoft Office Excel 2016max80% (5)
- Projet Route GC2Dokument25 SeitenProjet Route GC2Driss DoudiNoch keine Bewertungen
- Controle Et Suivi Chantier RoutierhjhDokument14 SeitenControle Et Suivi Chantier Routierhjhعثمان البريشيNoch keine Bewertungen
- Canalisations de Gaz NaturelDokument120 SeitenCanalisations de Gaz NaturelJean-David DelordNoch keine Bewertungen
- Process AciérieDokument6 SeitenProcess Aciériesanae jaouiNoch keine Bewertungen
- Etude de ProjetDokument3 SeitenEtude de Projetsalem saberNoch keine Bewertungen
- ALIZE LCPC MU v1.5 FR PDFDokument116 SeitenALIZE LCPC MU v1.5 FR PDFSoumana Abdou100% (1)
- Exposé.raccordement Et Clothoide Groupe 2ADokument22 SeitenExposé.raccordement Et Clothoide Groupe 2ACyr TonoukoinNoch keine Bewertungen
- Correction DevoirDeSyntheseN3 1AS 2009 FinDokument8 SeitenCorrection DevoirDeSyntheseN3 1AS 2009 FinMehdi Ben Arif67% (3)
- Cours 2Dokument53 SeitenCours 2Ilias Amokrane100% (3)
- Chapitre 3 (Partie 2)Dokument11 SeitenChapitre 3 (Partie 2)Khalil KhalilNoch keine Bewertungen
- Methodologie de Trace RoutierDokument2 SeitenMethodologie de Trace Routierx2100% (1)
- Calcul Des DalotsDokument47 SeitenCalcul Des DalotsNathan MalambaNoch keine Bewertungen
- TFE Gustave KISHATU MWAMBA Version Finale-1Dokument112 SeitenTFE Gustave KISHATU MWAMBA Version Finale-1gustave kishatu100% (2)
- 04 Trace Et Normes GeometriquesDokument76 Seiten04 Trace Et Normes GeometriquesYesmine100% (3)
- TP2Dokument4 SeitenTP2Youssef Don RajawiNoch keine Bewertungen
- Cerema Fiche 2 - Tramway Et Traversées Piétonnes 2015Dokument12 SeitenCerema Fiche 2 - Tramway Et Traversées Piétonnes 2015jtex2100% (1)
- Géométrie Du Tracé en Plan Chap 3Dokument7 SeitenGéométrie Du Tracé en Plan Chap 3mussari100% (1)
- Profil en LongDokument4 SeitenProfil en LongJihene Ben KacemNoch keine Bewertungen
- 03 Trace Et Normes GeometriquesDokument81 Seiten03 Trace Et Normes GeometriquesIlhem Arfaoui100% (1)
- Chap 4 Trace en PlanDokument15 SeitenChap 4 Trace en Plansandra massdez100% (1)
- Chapitre.2.Les Profils en Long, en Travers Et Le Tracé en PlanDokument11 SeitenChapitre.2.Les Profils en Long, en Travers Et Le Tracé en PlanFranck Armel Konan100% (1)
- Exemens Unifié - EXPLOITATION ET SECURITÉ ROUTIÈRE 2019-2020Dokument5 SeitenExemens Unifié - EXPLOITATION ET SECURITÉ ROUTIÈRE 2019-2020Abdellah HarricouNoch keine Bewertungen
- Initiation À La Conception Des RoutesDokument1 SeiteInitiation À La Conception Des RoutesSeif17Noch keine Bewertungen
- Profil en Long-Converti PDFDokument4 SeitenProfil en Long-Converti PDFAmin MinouNoch keine Bewertungen
- Chap - 6 Profil en TraversDokument8 SeitenChap - 6 Profil en Traverssandra massdezNoch keine Bewertungen
- EFM2Dokument6 SeitenEFM2oudmaneNoch keine Bewertungen
- Comptage Routier 2017 PDFDokument265 SeitenComptage Routier 2017 PDFanassafouiNoch keine Bewertungen
- Rapport - Projet Conceptiond'une Route Dans La Region de Kedougou - Trace Travaux Publics - de Boussou Brice NoelDokument15 SeitenRapport - Projet Conceptiond'une Route Dans La Region de Kedougou - Trace Travaux Publics - de Boussou Brice NoelWilliam NNoch keine Bewertungen
- GENERALITES SUR LE TRACER EN PLAN D (Enregistré Automatiquement) Issac TshiweweDokument17 SeitenGENERALITES SUR LE TRACER EN PLAN D (Enregistré Automatiquement) Issac TshiweweDaniel KabongoNoch keine Bewertungen
- Projet Route - Les Echangeurs-Partie1Dokument12 SeitenProjet Route - Les Echangeurs-Partie1Naifar Ons100% (1)
- CHAPITRE 2 Etude de TraficDokument7 SeitenCHAPITRE 2 Etude de TraficAbdallah MAHAMAT KHAMISNoch keine Bewertungen
- Projet Linéaire - Renforcement V7Dokument20 SeitenProjet Linéaire - Renforcement V7Kouadio Jean Luc YobouéNoch keine Bewertungen
- PROJET TOPOGRAPHIE - Ali ANIS ALIDokument46 SeitenPROJET TOPOGRAPHIE - Ali ANIS ALIAbou DiopNoch keine Bewertungen
- Cours de Trace RoutièreDokument44 SeitenCours de Trace RoutièreDriss NasirNoch keine Bewertungen
- Epreuves Des Ouvrages D'art Avec Un ExempleDokument2 SeitenEpreuves Des Ouvrages D'art Avec Un ExempleTAYSSIR CHOUCHENE100% (1)
- Chapitre 4Dokument7 SeitenChapitre 4Karim FathallahNoch keine Bewertungen
- 5-3 Module TPL PDFDokument22 Seiten5-3 Module TPL PDFclaudeNoch keine Bewertungen
- RaccordDokument4 SeitenRaccordIsmail AdmichNoch keine Bewertungen
- Beggache, Nabil Mouas, Nadir PDFDokument126 SeitenBeggache, Nabil Mouas, Nadir PDFjaouadNoch keine Bewertungen
- VOIRIESDokument63 SeitenVOIRIESFNoch keine Bewertungen
- Mini Projet TibouDokument22 SeitenMini Projet TibouKhalil Ben Mansour100% (1)
- Présentation Projet de RoutesDokument26 SeitenPrésentation Projet de Routessikda sokaNoch keine Bewertungen
- Aménagement Des Carrefours-1Dokument43 SeitenAménagement Des Carrefours-1Yves AhlonsouNoch keine Bewertungen
- Examen R 2 2018-2019 PDFDokument2 SeitenExamen R 2 2018-2019 PDFNoreddine Ait OussiNoch keine Bewertungen
- Ms GC Lasri+Hamoudi PDFDokument126 SeitenMs GC Lasri+Hamoudi PDFnebileNoch keine Bewertungen
- TRDokument6 SeitenTRMohamed KanzoutNoch keine Bewertungen
- TP RouteDokument20 SeitenTP RouteFarahBoughanmiNoch keine Bewertungen
- Chapitre Ii Partie Dimensionnement StructuralDokument6 SeitenChapitre Ii Partie Dimensionnement StructuralFalilou THIOUBNoch keine Bewertungen
- Chapitre 04 Tracé en Plan: Iv - 1-DefinitionDokument14 SeitenChapitre 04 Tracé en Plan: Iv - 1-DefinitionAmin MinouNoch keine Bewertungen
- Calcul - Nbre VoiesDokument4 SeitenCalcul - Nbre Voieshadjer amel DehiniNoch keine Bewertungen
- Chapitre 7 PontDokument70 SeitenChapitre 7 PontIshak BendounanNoch keine Bewertungen
- 16 Cha 11 SignalisationDokument7 Seiten16 Cha 11 SignalisationnebileNoch keine Bewertungen
- Rapport BETDokument16 SeitenRapport BETSou MiaNoch keine Bewertungen
- TD2 CorrectionDokument8 SeitenTD2 CorrectionThibault TroncheNoch keine Bewertungen
- Chapitre 12 Signalisation Et Eclairage: Signialisation Xii-1-IntroductionDokument8 SeitenChapitre 12 Signalisation Et Eclairage: Signialisation Xii-1-IntroductionAmin MinouNoch keine Bewertungen
- Un ÉchangeurDokument2 SeitenUn ÉchangeurNaifar OnsNoch keine Bewertungen
- Avant Projet RouteDokument39 SeitenAvant Projet Routedawenstherilus1994Noch keine Bewertungen
- 1 - Resume PontsDokument13 Seiten1 - Resume PontsMouhcine MouhcinovichNoch keine Bewertungen
- Diagramme Des 3 PivotsDokument3 SeitenDiagramme Des 3 PivotsDieseNoch keine Bewertungen
- Mini Projet RouteDokument4 SeitenMini Projet RouteGuizani HamzaNoch keine Bewertungen
- Pfe Kabbab BatalDokument131 SeitenPfe Kabbab BatalmustaphaNoch keine Bewertungen
- Chap2 Poutre ContinueDokument23 SeitenChap2 Poutre ContinueEden St CyrNoch keine Bewertungen
- Cours Routes 2 - New1 - New1 ACTU3Dokument96 SeitenCours Routes 2 - New1 - New1 ACTU3Wisdom Serge SerginoNoch keine Bewertungen
- Cours PisteDokument35 SeitenCours PisteIatissami IlyassNoch keine Bewertungen
- Rapport de Stage LEBEST PDFDokument57 SeitenRapport de Stage LEBEST PDFmohamedNoch keine Bewertungen
- Port de Projet Routier 2023Dokument18 SeitenPort de Projet Routier 2023Oussama El bouchty100% (1)
- c3d Content France Doc French 2018Dokument24 Seitenc3d Content France Doc French 2018WahabTouréNoch keine Bewertungen
- TD1 STR1 3GCDokument1 SeiteTD1 STR1 3GCsalem saberNoch keine Bewertungen
- Devoir de Contrôle N°3 2ème Semestre - Math - 1ère AS (2018-2019)Dokument1 SeiteDevoir de Contrôle N°3 2ème Semestre - Math - 1ère AS (2018-2019)salem saberNoch keine Bewertungen
- DGFIP GP 11 2014-DelegationDokument53 SeitenDGFIP GP 11 2014-Delegationsalem saberNoch keine Bewertungen
- M JeljliDokument2 SeitenM Jeljlisalem saberNoch keine Bewertungen
- Calendrier 2017 2018 ENSITDokument1 SeiteCalendrier 2017 2018 ENSITsalem saberNoch keine Bewertungen
- Exam. F.CDokument2 SeitenExam. F.CmidsmasherNoch keine Bewertungen
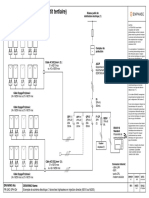
- 3 Branches Triphasées en Injection Directe M215 Ou M250Dokument1 Seite3 Branches Triphasées en Injection Directe M215 Ou M250MbgardNoch keine Bewertungen
- Jadwal Genap 2223-2Dokument2 SeitenJadwal Genap 2223-2nowo benyNoch keine Bewertungen
- AnnexeDokument168 SeitenAnnexeMoez AliNoch keine Bewertungen
- Mesure de Compression Moteur Vers FinaleDokument46 SeitenMesure de Compression Moteur Vers FinaleRaouf HarzallahNoch keine Bewertungen
- The Cuban Missile CrisisDokument8 SeitenThe Cuban Missile Crisismilan.bodis523Noch keine Bewertungen
- RSE & EthiqueDokument6 SeitenRSE & Ethiquealemor2369Noch keine Bewertungen
- Les Étapes de Formation Des Roches SédimentaireDokument2 SeitenLes Étapes de Formation Des Roches Sédimentairehamada2002Noch keine Bewertungen
- Calendrier Des Examens Semestre Impair Janvier 2022 AlphaDokument28 SeitenCalendrier Des Examens Semestre Impair Janvier 2022 AlphaMeg JustMegNoch keine Bewertungen
- Format Eur FrancaiseDokument1 SeiteFormat Eur FrancaiseAdnan NandaNoch keine Bewertungen
- Exercice D'application Optique VDokument1 SeiteExercice D'application Optique VARDALAn MohamedNoch keine Bewertungen
- Observatoire National de La Filiere Riz Du Burkina Faso (Onriz)Dokument6 SeitenObservatoire National de La Filiere Riz Du Burkina Faso (Onriz)toni_yousf2418Noch keine Bewertungen
- Chapitre 1 LES OUTILS MATHEMATIQUESDokument9 SeitenChapitre 1 LES OUTILS MATHEMATIQUESa.ddNoch keine Bewertungen
- PV Liste-De-Prix Onduleurs HUAWEI 11-2023 FRDokument2 SeitenPV Liste-De-Prix Onduleurs HUAWEI 11-2023 FRkoumbounisdimNoch keine Bewertungen
- 3 Partie Caractéristiques Des LubrifiantDokument32 Seiten3 Partie Caractéristiques Des Lubrifiantsamir belamriNoch keine Bewertungen
- Tube VentouriDokument10 SeitenTube VentouriMohammed BoulbairNoch keine Bewertungen
- Arval - Cofrastra 40Dokument16 SeitenArval - Cofrastra 40helder.fradeNoch keine Bewertungen
- Caplp Externe Genie Electrique Electrotechnique Et Energie Epreuve 1 Doc RessourcesDokument28 SeitenCaplp Externe Genie Electrique Electrotechnique Et Energie Epreuve 1 Doc RessourcesOus SàmàNoch keine Bewertungen
- Exposé MDE Et Énergie RenouvelablesDokument12 SeitenExposé MDE Et Énergie Renouvelablesromain fokamNoch keine Bewertungen
- Memoire Inj Messaoud BENZOUAIDokument168 SeitenMemoire Inj Messaoud BENZOUAIManong ShegueyNoch keine Bewertungen
- Introduction À La RobotiqueDokument19 SeitenIntroduction À La RobotiqueRazzougui SarahNoch keine Bewertungen
- Observons:: Nature Du Complément Circonstanciel de TempsDokument2 SeitenObservons:: Nature Du Complément Circonstanciel de TempsMehdi YMNoch keine Bewertungen