Das könnte Ihnen auch gefallen
- Javascript Built-In FunctionsDokument5 SeitenJavascript Built-In FunctionsMena Desalegne50% (2)
- TM-2122 AVEVA Marine (12.1) Project Administration (Hull) Rev 4.0Dokument94 SeitenTM-2122 AVEVA Marine (12.1) Project Administration (Hull) Rev 4.0ThangiPandian1985100% (1)
- Unified Contact Center Enterprise (UCCE) and Customer Voice Portal (CVP) Installation Configuration and Deployment GuideDokument11 SeitenUnified Contact Center Enterprise (UCCE) and Customer Voice Portal (CVP) Installation Configuration and Deployment GuidesmairuraNoch keine Bewertungen
- PSIM User ManualDokument259 SeitenPSIM User ManualCourtney JenningsNoch keine Bewertungen
- DC DC Converter Validation For Battery Electric Vehicle Using HILSDokument24 SeitenDC DC Converter Validation For Battery Electric Vehicle Using HILSxlnc1Noch keine Bewertungen
- Digsilent Powerfactory: Technical Reference DocumentationDokument12 SeitenDigsilent Powerfactory: Technical Reference DocumentationmingNoch keine Bewertungen
- Imm DesignDokument76 SeitenImm Designrobbertjv2104100% (1)
- Vtu Lab Manuals VlsiDokument79 SeitenVtu Lab Manuals VlsisrikanthuasNoch keine Bewertungen
- Power Management GuideDokument121 SeitenPower Management GuidelibertadorpmvNoch keine Bewertungen
- ControlDeskIntroductionAndOverview 5c9cfe49 A7c6 4205 8df0 C317b9a28deaDokument206 SeitenControlDeskIntroductionAndOverview 5c9cfe49 A7c6 4205 8df0 C317b9a28deaVeeranki DavidNoch keine Bewertungen
- From Simulink To Autosar Enabling Autosar Code Generation With Model Based DesignDokument46 SeitenFrom Simulink To Autosar Enabling Autosar Code Generation With Model Based Designdeepakdcb20102487Noch keine Bewertungen
- Software Prep GuideDokument74 SeitenSoftware Prep GuidePerepi HemanthiNoch keine Bewertungen
- 7.chapter7 - Operational AmplifierDokument36 Seiten7.chapter7 - Operational Amplifierngoc an nguyenNoch keine Bewertungen
- Motor Sizing WorksheetDokument5 SeitenMotor Sizing Worksheetapi-3835934Noch keine Bewertungen
- D SPACESimulator Mid Size FeaturesDokument216 SeitenD SPACESimulator Mid Size FeaturesSharath BhavanasiNoch keine Bewertungen
- MmuDokument113 SeitenMmuSunny SanNoch keine Bewertungen
- High Speed Design Techniques PDFDokument416 SeitenHigh Speed Design Techniques PDFbolermNoch keine Bewertungen
- Lab (GPDK)Dokument49 SeitenLab (GPDK)Murali MurariNoch keine Bewertungen
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionVon EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionNoch keine Bewertungen
- 3D Photovoltaic Devices Complete Self-Assessment GuideVon Everand3D Photovoltaic Devices Complete Self-Assessment GuideNoch keine Bewertungen
- AccuLoad III - ALX - Modbus Communications Manual MN06131LDokument456 SeitenAccuLoad III - ALX - Modbus Communications Manual MN06131LEitanBoriaNoch keine Bewertungen
- Advanced Battery Management Technologies for Electric VehiclesVon EverandAdvanced Battery Management Technologies for Electric VehiclesNoch keine Bewertungen
- Risks and Benefits of Business Intelligence in The CloudDokument10 SeitenRisks and Benefits of Business Intelligence in The CloudElena CanajNoch keine Bewertungen
- DSPDokument77 SeitenDSPVikas YadavNoch keine Bewertungen
- Design and Modelling of Internal Permanent Magnet Motor (#764846) - 1189475Dokument25 SeitenDesign and Modelling of Internal Permanent Magnet Motor (#764846) - 1189475Tejas PanchalNoch keine Bewertungen
- Dspace MicroLabBoxDokument12 SeitenDspace MicroLabBoxCatalin NacuNoch keine Bewertungen
- Closed Loop Control of PMSM Motor: Field Oriented Control Using Hall SensorsDokument52 SeitenClosed Loop Control of PMSM Motor: Field Oriented Control Using Hall SensorsLoyel RoseNoch keine Bewertungen
- Tms 320 F 28379 DDokument222 SeitenTms 320 F 28379 DJuan Ku LosanoNoch keine Bewertungen
- Micro Auto Box FeaturesDokument532 SeitenMicro Auto Box FeaturesSharath BhavanasiNoch keine Bewertungen
- SenseDokument2 SeitenSenseSpidey Reddy100% (1)
- OP5600 Simulator User ManualDokument52 SeitenOP5600 Simulator User Manualantonellagrande100% (1)
- Igbt & Sic Gate Driver Fundamentals: Enabling The World To Do More With Less PowerDokument35 SeitenIgbt & Sic Gate Driver Fundamentals: Enabling The World To Do More With Less Powersuper_facaNoch keine Bewertungen
- 7 Capture Compare PWMDokument19 Seiten7 Capture Compare PWMcrazyllmonkeyNoch keine Bewertungen
- Eia 232 422 486Dokument40 SeitenEia 232 422 486Supriya DessaiNoch keine Bewertungen
- Motors - Three Phase Induction Machine: ContentDokument41 SeitenMotors - Three Phase Induction Machine: ContentDuy Quang ĐàoNoch keine Bewertungen
- Installingd SPACESoftwareDokument96 SeitenInstallingd SPACESoftwareSharath BhavanasiNoch keine Bewertungen
- Rotary Transformer With Ferrite Core For Brushless Excitation of Synchronous MachinesDokument7 SeitenRotary Transformer With Ferrite Core For Brushless Excitation of Synchronous MachinesHuong ThaoNoch keine Bewertungen
- Generating 50Hz PWM Using PIC16F877ADokument2 SeitenGenerating 50Hz PWM Using PIC16F877AZarko DacevicNoch keine Bewertungen
- Arduino Based DC Motor Speed ControlDokument12 SeitenArduino Based DC Motor Speed Controlprabhu rachutiNoch keine Bewertungen
- Estabilizador Voltage ChopperDokument52 SeitenEstabilizador Voltage ChopperArmandinho CaveroNoch keine Bewertungen
- Write The Features of PIC16F8XX Flash Microcontrollers?: Unit-ViDokument6 SeitenWrite The Features of PIC16F8XX Flash Microcontrollers?: Unit-ViashokNoch keine Bewertungen
- Design of Inductors and High Frequency TransformersDokument6 SeitenDesign of Inductors and High Frequency TransformersNiranjan kumarNoch keine Bewertungen
- 8049Dokument239 Seiten8049adnantanNoch keine Bewertungen
- 3 - EE8002 DEA Unit 5Dokument21 Seiten3 - EE8002 DEA Unit 5Ramesh BabuNoch keine Bewertungen
- PSIM User Manual PDFDokument280 SeitenPSIM User Manual PDFHelenio Salvador PizarroNoch keine Bewertungen
- Prof DR Johann W Kolar PDFDokument82 SeitenProf DR Johann W Kolar PDFaswardiNoch keine Bewertungen
- 50hz Sine PWM Using Tms320f2812 DSPDokument19 Seiten50hz Sine PWM Using Tms320f2812 DSPVisu Tamil100% (2)
- CMOS Inverter LayoutDokument2 SeitenCMOS Inverter LayoutRen ValerosoNoch keine Bewertungen
- Power Electronics Electric DrivesDokument25 SeitenPower Electronics Electric DrivesMohd SarfarazNoch keine Bewertungen
- Magnet - PMSM AnalysisDokument26 SeitenMagnet - PMSM Analysispcg_liveNoch keine Bewertungen
- Asynchronous ChipsDokument25 SeitenAsynchronous ChipsAbin Varkey Varghese100% (1)
- Today: Inverter + PMSM Control: 3 Phase Inverter (DC To AC) 3 Phase Electric MachineDokument29 SeitenToday: Inverter + PMSM Control: 3 Phase Inverter (DC To AC) 3 Phase Electric Machineciprian167Noch keine Bewertungen
- Advanced Battery Management System Using MATLAB SimulinkDokument6 SeitenAdvanced Battery Management System Using MATLAB SimulinkAkash KumarNoch keine Bewertungen
- Introduction To DSP TMS320F2812Dokument18 SeitenIntroduction To DSP TMS320F2812Pantech ProLabs India Pvt Ltd100% (1)
- Embedded System in Automobiles Seminar ReportDokument18 SeitenEmbedded System in Automobiles Seminar ReportDeepak DevarajanNoch keine Bewertungen
- Battery Management SystemDokument89 SeitenBattery Management SystemUmar AyazNoch keine Bewertungen
- E-Book PPT On Embedded Embedded Automotive, NewDokument30 SeitenE-Book PPT On Embedded Embedded Automotive, NewMishmy T ShibukumarNoch keine Bewertungen
- Servo Basico x1Dokument18 SeitenServo Basico x1Elvis Torres QuispeNoch keine Bewertungen
- 50hz Sine PWM Using Tms320f2812 DSPDokument10 Seiten50hz Sine PWM Using Tms320f2812 DSPsivananda11Noch keine Bewertungen
- Sonu 1Dokument19 SeitenSonu 1Sonu SinghNoch keine Bewertungen
- Generate 1Khz PWM Using TMS320F2812 DSPDokument13 SeitenGenerate 1Khz PWM Using TMS320F2812 DSPVisu Tamil100% (1)
- Accelarating Motor Design & DevelopementDokument19 SeitenAccelarating Motor Design & DevelopementRamnik SinghNoch keine Bewertungen
- Features General Description: Low Cost Offline PSR CC/CV PWM Power SwitchDokument1 SeiteFeatures General Description: Low Cost Offline PSR CC/CV PWM Power Switch王宗超Noch keine Bewertungen
- Embedded Hypervisor The Ultimate Step-By-Step GuideVon EverandEmbedded Hypervisor The Ultimate Step-By-Step GuideNoch keine Bewertungen
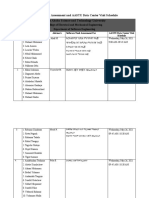
- Software Need Assessment and AASTU Data Center Visit ScheduleDokument9 SeitenSoftware Need Assessment and AASTU Data Center Visit ScheduleDagmawiNoch keine Bewertungen
- True Patent Value 知識點整理 - PDF PDFDokument1 SeiteTrue Patent Value 知識點整理 - PDF PDFLog LouNoch keine Bewertungen
- Sujan Nag ResumeDokument2 SeitenSujan Nag ResumeSujan NagNoch keine Bewertungen
- Planantir AI PatentDokument29 SeitenPlanantir AI PatentCharles GrossNoch keine Bewertungen
- PIC16F627A/628A/648A: 4.0 Memory OrganizationDokument2 SeitenPIC16F627A/628A/648A: 4.0 Memory OrganizationAndrés Gilberto Catalán HernándezNoch keine Bewertungen
- CPP and Ood The Least You Need To KnowDokument258 SeitenCPP and Ood The Least You Need To KnownicksbruceNoch keine Bewertungen
- My Experiments: Opencl Gpu Matrix Multiplication ProgramDokument19 SeitenMy Experiments: Opencl Gpu Matrix Multiplication Programsurajkr23Noch keine Bewertungen
- Vtu 4th Sem Cse Microprocessors Notes 10cs45 PDFDokument112 SeitenVtu 4th Sem Cse Microprocessors Notes 10cs45 PDFPRINCE DEWANGANNoch keine Bewertungen
- MIT401 With AnswersDokument14 SeitenMIT401 With AnswersAmit ParabNoch keine Bewertungen
- Chapter 02Dokument56 SeitenChapter 02Burcu SaygınNoch keine Bewertungen
- ANRI Invitation For F2F Interview With HCL Technologies For SAP Basis (07 July '2018, Saturday)Dokument3 SeitenANRI Invitation For F2F Interview With HCL Technologies For SAP Basis (07 July '2018, Saturday)master_sodhi19Noch keine Bewertungen
- TUTODokument12 SeitenTUTOCirilo Armando Solano PinedaNoch keine Bewertungen
- ITIL Practice Test 1Dokument13 SeitenITIL Practice Test 1DJNoch keine Bewertungen
- Gadget Comparison - Mi 1c - 02 - Ahmad Ridlo Suhardi#14 - Gita Kartika Pariwara#21 - Putri Dian IstianaDokument8 SeitenGadget Comparison - Mi 1c - 02 - Ahmad Ridlo Suhardi#14 - Gita Kartika Pariwara#21 - Putri Dian IstianaGita Kartika PariwaraNoch keine Bewertungen
- 17 Case Study Risk Repsonse Planning PDFDokument22 Seiten17 Case Study Risk Repsonse Planning PDFmoNoch keine Bewertungen
- Hardware Configuration Changes in RUN ModeDokument4 SeitenHardware Configuration Changes in RUN ModeAdarsh BalakrishnanNoch keine Bewertungen
- Xenserver LabsDokument95 SeitenXenserver LabsPatrick KaakNoch keine Bewertungen
- MBillionth Nomination Form 2016Dokument9 SeitenMBillionth Nomination Form 2016Chinmaya ShrivastavaNoch keine Bewertungen
- Welcome in AsDokument84 SeitenWelcome in Asdanghe2006Noch keine Bewertungen
- Introduction To QBasicDokument27 SeitenIntroduction To QBasicMBHladilek100% (1)
- Scripting QTP - CH13 - Win32APIDokument22 SeitenScripting QTP - CH13 - Win32APIRajesh Kumar100% (2)
- 2.software and Hardware Requirement SpecificationDokument3 Seiten2.software and Hardware Requirement Specificationnaba221085Noch keine Bewertungen
- On Neutrosophic Semi-Open Sets in Neutrosophic Topological SpacesDokument10 SeitenOn Neutrosophic Semi-Open Sets in Neutrosophic Topological SpacesMia AmaliaNoch keine Bewertungen
- Lab1-5 YourBank CRM SRS v1.0.1 PDFDokument86 SeitenLab1-5 YourBank CRM SRS v1.0.1 PDFNhân NguyễnNoch keine Bewertungen