Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Self Employed Tailor ApparelDokument10 SeitenSelf Employed Tailor ApparelHarre KrrishnaaNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Inspections After A Hard Landing or A Hard Overweight Landing For Aircraft With Enhanced DMU/FDIMU Load Report 15Dokument161 SeitenInspections After A Hard Landing or A Hard Overweight Landing For Aircraft With Enhanced DMU/FDIMU Load Report 15Ralph FernandesNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Spare Parts List: Pusher Leg RockdrillsDokument16 SeitenSpare Parts List: Pusher Leg RockdrillsMatheus Tavares100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- 20 Safety and RestraintDokument12 Seiten20 Safety and RestraintIqtidar ANoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Mini Compressor & Cooling Units - Rigid CoolingDokument16 SeitenMini Compressor & Cooling Units - Rigid CoolingronaldmarcelleNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Parts Reference ListDokument29 SeitenParts Reference ListVitor SousaNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Belt RipDokument2 SeitenBelt RipChristian Alberto DávilaNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- LG 42PQ30 Block DiagramDokument2 SeitenLG 42PQ30 Block DiagrammakotoNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- IRS2304 and IR2304 ComparisonDokument7 SeitenIRS2304 and IR2304 ComparisonGiraldoCarpioRamosNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Engine Type D946 A7-03 Rated Power 330 KW Rated Speed 2100 RPM Application Mobile Crane Carrier Emmisions Powerband HDokument4 SeitenEngine Type D946 A7-03 Rated Power 330 KW Rated Speed 2100 RPM Application Mobile Crane Carrier Emmisions Powerband HAmine DhahriNoch keine Bewertungen
- Lecture7 - Intercomponent BussesDokument62 SeitenLecture7 - Intercomponent BussesdyrmannNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Lp-s070 User Manual AutonicsDokument175 SeitenLp-s070 User Manual AutonicsPatricio DavidNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Job Aid: Replacing The Field Replaceable Units (Frus) For The Avaya G450 Media GatewayDokument18 SeitenJob Aid: Replacing The Field Replaceable Units (Frus) For The Avaya G450 Media Gatewayfaridfirdaus65Noch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- FBS Ii enDokument10 SeitenFBS Ii enunsalNoch keine Bewertungen
- AUMA (Ba Sar2!07!16 Amb1 En)Dokument60 SeitenAUMA (Ba Sar2!07!16 Amb1 En)cuongnammuNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- VSX-1015 RRV3113 PDFDokument140 SeitenVSX-1015 RRV3113 PDFAlver TuizaNoch keine Bewertungen
- Heat Tracing ManualDokument50 SeitenHeat Tracing ManualYerlanNoch keine Bewertungen
- Tds 11hd FlyerDokument2 SeitenTds 11hd Flyerعلي اثمار ناهي سباهيNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Baxxdd0 e 208708Dokument24 SeitenBaxxdd0 e 208708Oscar OreaNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- User Manual Toyota Supra MK4Dokument192 SeitenUser Manual Toyota Supra MK4Wisnel Lara0% (1)
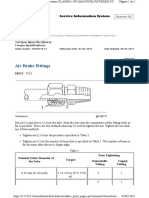
- Torque-Air Brake FittingsDokument2 SeitenTorque-Air Brake Fittingsyoga_jpbmbmNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- 4TH SEM MECH ENGG Lab Manual TOM and MeasurementDokument36 Seiten4TH SEM MECH ENGG Lab Manual TOM and MeasurementWbamlak AshebrNoch keine Bewertungen
- PM Checklist Okuma La TheDokument3 SeitenPM Checklist Okuma La TheMs Watty100% (1)
- Anbarasu C&I PDFDokument42 SeitenAnbarasu C&I PDFDeepak Saheb GuptaNoch keine Bewertungen
- Motherboard Manual Ga-8pemt4 eDokument96 SeitenMotherboard Manual Ga-8pemt4 eAndres Duran RinconNoch keine Bewertungen
- Data Sheet: SMPS630-GDokument11 SeitenData Sheet: SMPS630-GXuân TrườngNoch keine Bewertungen
- VTP8 Series Frequency Inverter ManualDokument70 SeitenVTP8 Series Frequency Inverter ManualpiernodoyunaNoch keine Bewertungen
- Translogic BA Blip Assist Manual Issue 07Dokument11 SeitenTranslogic BA Blip Assist Manual Issue 07Matthew WrenNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Daily Monitoring Defect SheetDokument15 SeitenDaily Monitoring Defect Sheetmanju nathNoch keine Bewertungen
- Alternator Parts: Dynamo Onderdelen Lichtmaschine Teilen Piezas de Alternador Pièces d'Alternateur Запчасти ГенератораDokument63 SeitenAlternator Parts: Dynamo Onderdelen Lichtmaschine Teilen Piezas de Alternador Pièces d'Alternateur Запчасти ГенератораFernando Sanchez SanchezNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)