Das könnte Ihnen auch gefallen
- E GovernanceDokument20 SeitenE GovernanceAditya PasuparthiNoch keine Bewertungen
- Swe428-Egovernance: G JagadeeshDokument21 SeitenSwe428-Egovernance: G JagadeeshAditya PasuparthiNoch keine Bewertungen
- eGov-eGovAndEGovernanceDokument16 SeiteneGov-eGovAndEGovernanceAditya PasuparthiNoch keine Bewertungen
- 3Dokument21 Seiten3Aditya PasuparthiNoch keine Bewertungen
- Swe428-Egovernance: G JagadeeshDokument21 SeitenSwe428-Egovernance: G JagadeeshAditya PasuparthiNoch keine Bewertungen
- Automation in Library Management Using Labview: Anita Gade Yogesh AngalDokument5 SeitenAutomation in Library Management Using Labview: Anita Gade Yogesh AngalAditya PasuparthiNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- John 16 33 Sweet Peace For Tried Believers - Charles SpurgeonDokument15 SeitenJohn 16 33 Sweet Peace For Tried Believers - Charles Spurgeonstevel75Noch keine Bewertungen
- The War Archives - Machinery of Conflict. British Military Trucks of WWIIDokument84 SeitenThe War Archives - Machinery of Conflict. British Military Trucks of WWIISebastijan Kerše100% (10)
- Chemistry PropertiesDokument14 SeitenChemistry PropertiesconchoNoch keine Bewertungen
- Outotec: Managing Talent Globally With Successfactors® SolutionsDokument3 SeitenOutotec: Managing Talent Globally With Successfactors® SolutionsxandaniNoch keine Bewertungen
- LCA - Life Cycle AssessmentDokument14 SeitenLCA - Life Cycle AssessmentBidisha Guha (Ms)Noch keine Bewertungen
- EV1116 Manual 146251999-4DDokument32 SeitenEV1116 Manual 146251999-4Danitha ferryNoch keine Bewertungen
- Application of Operations Research in Banking FinanceDokument13 SeitenApplication of Operations Research in Banking FinanceInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- Understanding the Four Aspects of EmotionsDokument13 SeitenUnderstanding the Four Aspects of EmotionsRaymond FaeldoñaNoch keine Bewertungen
- Team Handball SG Pratt v2Dokument2 SeitenTeam Handball SG Pratt v2Peter StonesNoch keine Bewertungen
- English 6 Action Research Contextualized Materials ProposalDokument41 SeitenEnglish 6 Action Research Contextualized Materials ProposalJake YaoNoch keine Bewertungen
- Enzymatic Browning and Its Prevention-American Chemical Society (1995)Dokument340 SeitenEnzymatic Browning and Its Prevention-American Chemical Society (1995)danielguerinNoch keine Bewertungen
- Introduction: Use Chapter 2 Section 2 in Your Flexbook To Define The FollowingDokument5 SeitenIntroduction: Use Chapter 2 Section 2 in Your Flexbook To Define The FollowingNathalieNoch keine Bewertungen
- AC Circuit 2 (Three-Phase)Dokument2 SeitenAC Circuit 2 (Three-Phase)marlon desaculaNoch keine Bewertungen
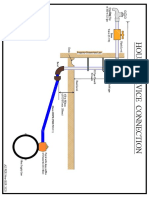
- House Service Connection NEW BSR 2020-1Dokument1 SeiteHouse Service Connection NEW BSR 2020-1Deshraj BairwaNoch keine Bewertungen
- GPS Navigator: ModelDokument99 SeitenGPS Navigator: ModelMain UddinNoch keine Bewertungen
- FMDokument12 SeitenFMGajera HarshadNoch keine Bewertungen
- Greek MathemaDokument6 SeitenGreek MathemaSebastian GhermanNoch keine Bewertungen
- Land Rover Range Rover Owners Manual 2007Dokument358 SeitenLand Rover Range Rover Owners Manual 2007PetreCaracaleanu0% (1)
- RUDDER PLATING DIAGRAMDokument1 SeiteRUDDER PLATING DIAGRAMMuhammad Ilham AlfiansyahNoch keine Bewertungen
- Chapter 4: Input/Output Programming of 8051 CPUDokument7 SeitenChapter 4: Input/Output Programming of 8051 CPUIsmailNoch keine Bewertungen
- AIA Design Development Deliverable ListDokument8 SeitenAIA Design Development Deliverable Listpeterhwilliams100% (1)
- 3ixso2idq334tonwmfhk0rrcDokument2 Seiten3ixso2idq334tonwmfhk0rrcrishikeshraj2021Noch keine Bewertungen
- Hanoi 2023 Peoples Picks AwardsDokument113 SeitenHanoi 2023 Peoples Picks AwardsNguyen Anh VuNoch keine Bewertungen
- Khalid DL 01 ProfileDokument2 SeitenKhalid DL 01 ProfileRipunjay MishraNoch keine Bewertungen
- Exercise - 8.1 NewDokument24 SeitenExercise - 8.1 NewAkriti Sharma 757Noch keine Bewertungen
- Word Trek Lesson OutlinesDokument8 SeitenWord Trek Lesson Outlinesapi-289048378Noch keine Bewertungen
- STC PDFDokument34 SeitenSTC PDFМиша ШаулаNoch keine Bewertungen
- Exercise 56 - Narration and SequenceDokument14 SeitenExercise 56 - Narration and SequenceLéoKostasNoch keine Bewertungen
- Creative NonfictionDokument11 SeitenCreative NonfictionRubelyn CagapeNoch keine Bewertungen
- Op-Amp Comparator: Astable (Or Free-Running) Multivibrators Monostable MultivibratorsDokument5 SeitenOp-Amp Comparator: Astable (Or Free-Running) Multivibrators Monostable MultivibratorsYuvaraj ShanNoch keine Bewertungen