Das könnte Ihnen auch gefallen
- 737 Performance Reference Handbook - EASA EditionVon Everand737 Performance Reference Handbook - EASA EditionBewertung: 4.5 von 5 Sternen4.5/5 (3)
- Reading Comprehension Animals Copyright English Created Resources PDFDokument10 SeitenReading Comprehension Animals Copyright English Created Resources PDFCasillas ElNoch keine Bewertungen
- HAF F16 ManualDokument513 SeitenHAF F16 Manualgreekm4dn3ss86% (7)
- Airplane Performance & DesignDokument250 SeitenAirplane Performance & Designjwzumwalt100% (17)
- Le Nu Spa Employee HandbookDokument34 SeitenLe Nu Spa Employee Handbookhamzeh abo hammourNoch keine Bewertungen
- Control and Simulation in LabVIEWDokument53 SeitenControl and Simulation in LabVIEWDaaniel MartinezNoch keine Bewertungen
- Economics of Money Banking and Financial Markets 12th Edition Mishkin Solutions ManualDokument3 SeitenEconomics of Money Banking and Financial Markets 12th Edition Mishkin Solutions Manualalexanderyanggftesimjac100% (15)
- Projects With Microcontrollers And PICCVon EverandProjects With Microcontrollers And PICCBewertung: 5 von 5 Sternen5/5 (1)
- Organizational Transformations: Population Ecology TheoryDokument25 SeitenOrganizational Transformations: Population Ecology TheoryTurki Jarallah100% (2)
- Aviation Transponder Codes and IdentificationDokument7 SeitenAviation Transponder Codes and IdentificationRoxane MawuntuNoch keine Bewertungen
- Ethical ControlDokument28 SeitenEthical ControlLani Derez100% (1)
- Groundwater Control For Cross PassagesDokument6 SeitenGroundwater Control For Cross PassageskrainajackaNoch keine Bewertungen
- Integrative Paper Unfolding The SelfDokument11 SeitenIntegrative Paper Unfolding The SelfTrentox XXXNoch keine Bewertungen
- Sqwak CodeDokument6 SeitenSqwak Codehonda7096Noch keine Bewertungen
- History I.M.PeiDokument26 SeitenHistory I.M.PeiVedasri RachaNoch keine Bewertungen
- Tthe Sacrament of Reconciliation1Dokument47 SeitenTthe Sacrament of Reconciliation1Rev. Fr. Jessie Somosierra, Jr.Noch keine Bewertungen
- 2023 Civil LawDokument7 Seiten2023 Civil LawJude OnrubiaNoch keine Bewertungen
- Exam 2 Study GuideDokument11 SeitenExam 2 Study GuideAnonymous ewJy7jyvNNoch keine Bewertungen
- Anti Viral DrugsDokument6 SeitenAnti Viral DrugskakuNoch keine Bewertungen
- Airport Problem SimulationDokument26 SeitenAirport Problem SimulationPrashant KumarNoch keine Bewertungen
- isd_code4Dokument5 Seitenisd_code4Khushi AgrawalNoch keine Bewertungen
- EuroFPL-ICAO Flightplan Form Basics-LatestDokument7 SeitenEuroFPL-ICAO Flightplan Form Basics-LatestLuis OrtizNoch keine Bewertungen
- UntitledDokument10 SeitenUntitledapi-222480083Noch keine Bewertungen
- Sketch Oct19aDokument2 SeitenSketch Oct19aChandika AnnasiwattaNoch keine Bewertungen
- True RMSDokument5 SeitenTrue RMSnguyen van ANNoch keine Bewertungen
- Tsl230r SensorDokument19 SeitenTsl230r SensorRaquel Lòpez CamposNoch keine Bewertungen
- LCDDokument4 SeitenLCDPragathi P PaiNoch keine Bewertungen
- Aircraft Configuration FilesDokument11 SeitenAircraft Configuration FilesImanolLopezNoch keine Bewertungen
- Code DumpDokument17 SeitenCode DumpGameplay OrIgInAlINoch keine Bewertungen
- Ee 222 CepDokument10 SeitenEe 222 CepObed AhmadNoch keine Bewertungen
- LastDokument5 SeitenLastThinh HoangNoch keine Bewertungen
- 10 Debugging Techniques for Embedded SoftwareDokument44 Seiten10 Debugging Techniques for Embedded Softwaremadhuri kurriNoch keine Bewertungen
- Measure Time StepsDokument2 SeitenMeasure Time Stepsapi-526076334Noch keine Bewertungen
- Very Very ImportantDokument6 SeitenVery Very ImportantnehalNoch keine Bewertungen
- FDDokument2 SeitenFDknoppix_debianNoch keine Bewertungen
- Control Arduino CNC Plotter with ProcessingDokument17 SeitenControl Arduino CNC Plotter with ProcessingKol SambathNoch keine Bewertungen
- TAKEOFF2 ManfDokument4 SeitenTAKEOFF2 Manfrudy_423522658Noch keine Bewertungen
- Procedures Introduction - Ifly B747Dokument11 SeitenProcedures Introduction - Ifly B747tordo22Noch keine Bewertungen
- #Define #Define #Define #Define #Define #Define #Define #DefineDokument6 Seiten#Define #Define #Define #Define #Define #Define #Define #Defineอํานาจ จันทรNoch keine Bewertungen
- Network Programming Lab: Submit by Guided byDokument28 SeitenNetwork Programming Lab: Submit by Guided byJámès KõstãNoch keine Bewertungen
- EuroFPL-ICAO Flightplan Form Basics-Latest PDFDokument7 SeitenEuroFPL-ICAO Flightplan Form Basics-Latest PDFsumaker1986Noch keine Bewertungen
- Connection Pixhawk FtdiDokument5 SeitenConnection Pixhawk FtdiJakubNoch keine Bewertungen
- Test Code33Dokument7 SeitenTest Code33JaNoch keine Bewertungen
- Vehicle Speed CodeDokument6 SeitenVehicle Speed CodeMadhanDhonianNoch keine Bewertungen
- Embedded C ProgramDokument7 SeitenEmbedded C ProgramLucifer100% (1)
- Ramp TestDokument4 SeitenRamp TestThinh HoangNoch keine Bewertungen
- ISG Settings PDFDokument29 SeitenISG Settings PDFmaxNoch keine Bewertungen
- PM Terminal Proc SDokument4 SeitenPM Terminal Proc SChris WatremezNoch keine Bewertungen
- SodaPDF-converted-Si5351 RXTX VFO V3Dokument12 SeitenSodaPDF-converted-Si5351 RXTX VFO V3LU8DIW Roberto MartinezNoch keine Bewertungen
- Codigo en C para Transmision FM en RaspberryDokument5 SeitenCodigo en C para Transmision FM en RaspberryRFID DemarkaNoch keine Bewertungen
- Progaram Code:: DistanceDokument3 SeitenProgaram Code:: DistanceSathvik GowdaNoch keine Bewertungen
- Introduction To The Analog Devices Aduc816Dokument10 SeitenIntroduction To The Analog Devices Aduc816tul25Noch keine Bewertungen
- CodeDokument9 SeitenCodeMuHammad TaHir HasSanNoch keine Bewertungen
- Codigo LCD C ModificadoDokument3 SeitenCodigo LCD C ModificadoMartinQuintanaCasusol100% (1)
- 国际运行(含报务)21 3 9Dokument220 Seiten国际运行(含报务)21 3 9316191040Noch keine Bewertungen
- Rtos Course ProjectDokument20 SeitenRtos Course Projecthammad choudharyNoch keine Bewertungen
- CCS C compiler Access to PIC internal peripherals summaryDokument14 SeitenCCS C compiler Access to PIC internal peripherals summaryEdmond LamNoch keine Bewertungen
- LM35 Temp Sensor Arduino CodeDokument3 SeitenLM35 Temp Sensor Arduino CodeSisayDesalegnNoch keine Bewertungen
- Computer Networks: Q1. Simulate Cyclic Redundancy Check (CRC)Dokument25 SeitenComputer Networks: Q1. Simulate Cyclic Redundancy Check (CRC)surehatiaNoch keine Bewertungen
- WaletDokument4 SeitenWaletYogi MahardikaNoch keine Bewertungen
- Interfacing 7Dokument105 SeitenInterfacing 7anon_720821824Noch keine Bewertungen
- Part-1 PIR Motion Sensor and Servo CodeDokument15 SeitenPart-1 PIR Motion Sensor and Servo CodeM Salman RyanNoch keine Bewertungen
- Arduino Serial Communication and Home AutomationDokument15 SeitenArduino Serial Communication and Home AutomationGalih Dwi100% (2)
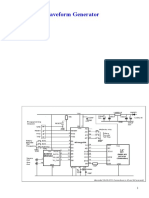
- AD9850 Waveform GeneratorDokument9 SeitenAD9850 Waveform GeneratorDemixManNoch keine Bewertungen
- Ramping Move Same TimeDokument6 SeitenRamping Move Same TimeThinh HoangNoch keine Bewertungen
- Arduino Code For CNC MachineDokument8 SeitenArduino Code For CNC Machinekidal permonoNoch keine Bewertungen
- RFLink Protocol ReferenceDokument5 SeitenRFLink Protocol ReferenceJeanNoch keine Bewertungen
- Airplane Assignment3Dokument16 SeitenAirplane Assignment3Bhuvanesh Kakarla AP21110010593Noch keine Bewertungen
- Arduino - Control ESC - Motor (Arduino Code)Dokument7 SeitenArduino - Control ESC - Motor (Arduino Code)ordenador90Noch keine Bewertungen
- Compiler Project Report On Mini C++ Compiler Using Lex and YaccDokument11 SeitenCompiler Project Report On Mini C++ Compiler Using Lex and YaccEmi Ra Batte BaazNoch keine Bewertungen
- TCPMUX - A mostly overlooked TCP serviceDokument4 SeitenTCPMUX - A mostly overlooked TCP serviceIpmkm SumbarNoch keine Bewertungen
- Pola Bintang Dengan For - Gudang BacaanDokument14 SeitenPola Bintang Dengan For - Gudang BacaanWildani HadiNoch keine Bewertungen
- Keyboard shortcuts for Windows file management and editorDokument1 SeiteKeyboard shortcuts for Windows file management and editorMOHD FAKRI AB RASIDNoch keine Bewertungen
- MySQL Database Connection and Basic SQL SyntaxDokument8 SeitenMySQL Database Connection and Basic SQL SyntaxWildani HadiNoch keine Bewertungen
- Dasar PHPDokument20 SeitenDasar PHPWildani HadiNoch keine Bewertungen
- Shared Memory ArchitectureDokument63 SeitenShared Memory ArchitectureWildani HadiNoch keine Bewertungen
- VET PREVENTIVE MEDICINE EXAMDokument8 SeitenVET PREVENTIVE MEDICINE EXAMashish kumarNoch keine Bewertungen
- Kimone Wright - Registered Nurse ResumeDokument2 SeitenKimone Wright - Registered Nurse Resumeapi-365123958Noch keine Bewertungen
- VB6 ControlDokument4 SeitenVB6 Controlahouba100% (1)
- Java Thread Priority in MultithreadingDokument3 SeitenJava Thread Priority in MultithreadingMITALI SHARMANoch keine Bewertungen
- Types, Shapes and MarginsDokument10 SeitenTypes, Shapes and MarginsAkhil KanukulaNoch keine Bewertungen
- Chapter 2 Phil. HistoryDokument4 SeitenChapter 2 Phil. HistoryJaylene AlbayNoch keine Bewertungen
- Product Data: Real-Time Frequency Analyzer - Type 2143 Dual Channel Real-Time Frequency Analyzers - Types 2144, 2148/7667Dokument12 SeitenProduct Data: Real-Time Frequency Analyzer - Type 2143 Dual Channel Real-Time Frequency Analyzers - Types 2144, 2148/7667jhon vargasNoch keine Bewertungen
- Eng CBLDokument2 SeitenEng CBLMengTangNoch keine Bewertungen
- IDokument8 SeitenICarlaSampaioNoch keine Bewertungen
- Bible TabsDokument8 SeitenBible TabsAstrid TabordaNoch keine Bewertungen
- Urbanization As A Transformative Force: Quick FactsDokument20 SeitenUrbanization As A Transformative Force: Quick FactsJulio CovarrubiasNoch keine Bewertungen
- Pines City Colleges: College of NursingDokument2 SeitenPines City Colleges: College of NursingmagisasamundoNoch keine Bewertungen
- Chemistry The Molecular Science 5th Edition Moore Solutions Manual 1Dokument36 SeitenChemistry The Molecular Science 5th Edition Moore Solutions Manual 1josephandersonxqwbynfjzk100% (27)
- One Stop Report - Tata MotorsDokument119 SeitenOne Stop Report - Tata MotorsJia HuiNoch keine Bewertungen
- G.R. No. 190583 - People vs FrontrerasDokument12 SeitenG.R. No. 190583 - People vs FrontrerasKaren Faye TorrecampoNoch keine Bewertungen
- Samonte Vs CADokument7 SeitenSamonte Vs CAMaricel Caranto FriasNoch keine Bewertungen
- Failure CountersDokument28 SeitenFailure CountersБотирали АзибаевNoch keine Bewertungen