Das könnte Ihnen auch gefallen
- SPRA7004Dokument50 SeitenSPRA7004530-M-004 AVINASH SAI GANGADANoch keine Bewertungen
- ROBOTICS CLASSIFICATION AND TYPESDokument65 SeitenROBOTICS CLASSIFICATION AND TYPESSiva ShankarNoch keine Bewertungen
- Mechanical Engineering Unit on Basics of RoboticsDokument68 SeitenMechanical Engineering Unit on Basics of RoboticsPRADEEPNoch keine Bewertungen
- Unit1 - Basic ConceptsDokument73 SeitenUnit1 - Basic ConceptsSharmila83Noch keine Bewertungen
- Chapter 1 - FundamentalsDokument28 SeitenChapter 1 - FundamentalsHayleysus ShmelashNoch keine Bewertungen
- Introduction To RoboticsDokument60 SeitenIntroduction To RoboticsJOEL STEPHEN 19BEE0262Noch keine Bewertungen
- All UnitDokument83 SeitenAll UnitShiek TiwariNoch keine Bewertungen
- Introduction To Robotics: A Common View: Robots As HumanoidsDokument24 SeitenIntroduction To Robotics: A Common View: Robots As HumanoidsmaniNoch keine Bewertungen
- Lecture 2 DR M AYAZ SHIRAZI NUST RoboticsDokument81 SeitenLecture 2 DR M AYAZ SHIRAZI NUST RoboticsOwais JafriNoch keine Bewertungen
- CEN-758 Lecture 01Dokument24 SeitenCEN-758 Lecture 01Muhammad HaseebNoch keine Bewertungen
- Unit 8: Robotics: The Origins of RobotsDokument29 SeitenUnit 8: Robotics: The Origins of RobotsshivaNoch keine Bewertungen
- Artificial Intelligence and RoboticsDokument91 SeitenArtificial Intelligence and RoboticsadityatheaaaNoch keine Bewertungen
- Robotics: Origins, Types, Uses & ConfigurationsDokument16 SeitenRobotics: Origins, Types, Uses & ConfigurationsNihar MehtaNoch keine Bewertungen
- Robotics - PresentationDokument57 SeitenRobotics - PresentationAnonymous YkDJkSqNoch keine Bewertungen
- Revision 4th UnitDokument80 SeitenRevision 4th UnitMICHEL RAJNoch keine Bewertungen
- 2-Brief History, Types of Robots, Degrees of Freedom of Robots, Robot configurations-13-Jul-2020Material - I - 13-Jul-2020 - IntroductionDokument62 Seiten2-Brief History, Types of Robots, Degrees of Freedom of Robots, Robot configurations-13-Jul-2020Material - I - 13-Jul-2020 - IntroductionSPARSH RAJNoch keine Bewertungen
- Introduction to Robotics Components and ClassificationsDokument28 SeitenIntroduction to Robotics Components and ClassificationsDhaba AlemuNoch keine Bewertungen
- Robotics_01Dokument45 SeitenRobotics_0133majeesamir66Noch keine Bewertungen
- Principles of RoboticsDokument81 SeitenPrinciples of RoboticssvenkatprasatNoch keine Bewertungen
- 1 A Inishantonrobotics-130912002640-Phpapp02Dokument31 Seiten1 A Inishantonrobotics-130912002640-Phpapp02SELVAKUMAR RNoch keine Bewertungen
- Unit 1 RoboticsDokument30 SeitenUnit 1 RoboticsVishnu PriyanNoch keine Bewertungen
- Robotics-Notes From MuDokument113 SeitenRobotics-Notes From MuGet OutNoch keine Bewertungen
- Part A Ans Key 1,2,4Dokument3 SeitenPart A Ans Key 1,2,4VenkadeshNoch keine Bewertungen
- What are industrial robotsDokument16 SeitenWhat are industrial robotsJhonathan BispoNoch keine Bewertungen
- Chapter 1 - FundamentalsDokument29 SeitenChapter 1 - FundamentalsPooja AngolkarNoch keine Bewertungen
- Answer The Following Questions Through The SlidesDokument72 SeitenAnswer The Following Questions Through The SlidesNathanael Aklilu EjersaNoch keine Bewertungen
- Unit1 - Fundamentals of Robotics - Industrial RoboticsDokument60 SeitenUnit1 - Fundamentals of Robotics - Industrial RoboticsShankar PawarNoch keine Bewertungen
- Introduction To RoboticsDokument63 SeitenIntroduction To RoboticsHunterWigintonNoch keine Bewertungen
- Fundamentals of Robotics: A Guide to Robot Anatomy, Coordinate Systems, Motions and ApplicationsDokument11 SeitenFundamentals of Robotics: A Guide to Robot Anatomy, Coordinate Systems, Motions and ApplicationsVishalNoch keine Bewertungen
- منهج كاملDokument163 Seitenمنهج كاملmohammedezz.htiNoch keine Bewertungen
- Robotics Unit-1 QBDokument5 SeitenRobotics Unit-1 QBveerapandianNoch keine Bewertungen
- Robotics Unit-1 Important QuestionsDokument15 SeitenRobotics Unit-1 Important QuestionsBEN G.YNoch keine Bewertungen
- Robotics Technology: The Wave of The Future!Dokument35 SeitenRobotics Technology: The Wave of The Future!Mousami SoniNoch keine Bewertungen
- School of Mechanical Engineering DepartmentDokument75 SeitenSchool of Mechanical Engineering DepartmentWilliam Jaya PrakashNoch keine Bewertungen
- Lecture 1Dokument42 SeitenLecture 1zeshan.hfd7866Noch keine Bewertungen
- Introduction To RoboticsDokument105 SeitenIntroduction To RoboticsMegha Dangayach 19BPS1127Noch keine Bewertungen
- Fundamentals of Robots Part ADokument12 SeitenFundamentals of Robots Part ACody LeeNoch keine Bewertungen
- Chapter 1Dokument50 SeitenChapter 1Genet GezehagnNoch keine Bewertungen
- Robotics (EL-422) Spring 22 Part 3Dokument40 SeitenRobotics (EL-422) Spring 22 Part 3Simra Shahid BawanyNoch keine Bewertungen
- Unit 1 Fundamentals of Robots: Sukantho Sikder Electronics DepartmentDokument167 SeitenUnit 1 Fundamentals of Robots: Sukantho Sikder Electronics Departmentsukantho sikderNoch keine Bewertungen
- Introduction To Robotics: Analysis, Systems, ApplicationsDokument28 SeitenIntroduction To Robotics: Analysis, Systems, ApplicationsFarhang NaderiNoch keine Bewertungen
- Unit I Fundamentals of Robot: Prepared by B.Balasubramanian Ap/Mech CcetDokument40 SeitenUnit I Fundamentals of Robot: Prepared by B.Balasubramanian Ap/Mech CcetBala mechNoch keine Bewertungen
- Robotics LatestDokument166 SeitenRobotics LatestfikaduNoch keine Bewertungen
- Industrial Robotics: History and Definition Classification of Robot Robot Anatomy and Robot Motion Work VolumeDokument73 SeitenIndustrial Robotics: History and Definition Classification of Robot Robot Anatomy and Robot Motion Work VolumeSiddharth Gupta0% (1)
- Unit 4: Introduction To Robot Fundamentals: MEL459: Mechatronics & RoboticsDokument70 SeitenUnit 4: Introduction To Robot Fundamentals: MEL459: Mechatronics & RoboticsKashish VermaNoch keine Bewertungen
- Robotics M1 L02Dokument28 SeitenRobotics M1 L02Abby StudiosNoch keine Bewertungen
- Oie 751 Robotics Unit 1 Q&a PDFDokument15 SeitenOie 751 Robotics Unit 1 Q&a PDFMICHEL RAJ0% (1)
- 1 - Introduction To RoboticsDokument64 Seiten1 - Introduction To RoboticsDibyanshuPandey100% (1)
- RoboticsDokument42 SeitenRoboticsMarini Pramod KumarNoch keine Bewertungen
- Unit 1: 6 HRS: Introduction: Basic Concepts, Laws of Robotics, RobotDokument69 SeitenUnit 1: 6 HRS: Introduction: Basic Concepts, Laws of Robotics, Robotvithal100% (1)
- Ndustrial Robotics: The Heart of Modern Manufacturing..Dokument54 SeitenNdustrial Robotics: The Heart of Modern Manufacturing..nishanth870% (1)
- Week 1Dokument47 SeitenWeek 1MohanNoch keine Bewertungen
- Unit Iv Introduction To Idustrial RobotsDokument16 SeitenUnit Iv Introduction To Idustrial RobotsBADINEHALSANDEEPNoch keine Bewertungen
- Robotics Fulll 2 16 Marks With AnswerDokument57 SeitenRobotics Fulll 2 16 Marks With AnswerSiva RamanNoch keine Bewertungen
- ES205 IntroDokument75 SeitenES205 IntroWarstilide49Noch keine Bewertungen
- Intro To RobotDokument43 SeitenIntro To RobotHarsha VardhanNoch keine Bewertungen
- Unit I Fundamentals of Robot: (Revision)Dokument16 SeitenUnit I Fundamentals of Robot: (Revision)MICHEL RAJNoch keine Bewertungen
- Module 01 - IntroductionDokument37 SeitenModule 01 - Introductionneelesh2k5Noch keine Bewertungen
- Robot Builder's Cookbook: Build and Design Your Own RobotsVon EverandRobot Builder's Cookbook: Build and Design Your Own RobotsBewertung: 2.5 von 5 Sternen2.5/5 (3)
- PricelistDokument19 SeitenPricelistMulu GirmayNoch keine Bewertungen
- PricelistDokument8 SeitenPricelistrajuNoch keine Bewertungen
- Me 703 Mechanical Vibration and Noise Engineering Dec 2015 PDFDokument2 SeitenMe 703 Mechanical Vibration and Noise Engineering Dec 2015 PDFMulu GirmayNoch keine Bewertungen
- DYNAMICS OF MACHINERY: Do Kinematic Analysis With MatlabDokument43 SeitenDYNAMICS OF MACHINERY: Do Kinematic Analysis With MatlabThanh NguyenNoch keine Bewertungen
- Ch1 Introduction To RoboticsDokument23 SeitenCh1 Introduction To RoboticsMulu GirmayNoch keine Bewertungen
- ME224 KinematicsDokument1 SeiteME224 KinematicsalfeusmartiusNoch keine Bewertungen
- Aue Ae 402 Automation and Mechatronics Dec 2011Dokument2 SeitenAue Ae 402 Automation and Mechatronics Dec 2011Mulu GirmayNoch keine Bewertungen
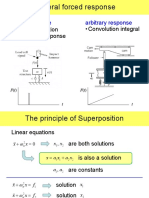
- Ch4 - General Forced ResponseDokument21 SeitenCh4 - General Forced ResponseMulu GirmayNoch keine Bewertungen
- IIT Madras Mechanical Engineering CurriculumDokument7 SeitenIIT Madras Mechanical Engineering CurriculumMulu GirmayNoch keine Bewertungen
- Mechatronics Curriculum - 2 PDFDokument4 SeitenMechatronics Curriculum - 2 PDFMulu GirmayNoch keine Bewertungen
- Me322 PDFDokument1 SeiteMe322 PDFMulu GirmayNoch keine Bewertungen
- Sand CDokument4 SeitenSand Cer_aman11Noch keine Bewertungen
- Advanced Control System Design Prof. Radhakant Padhi Department of Aerospace Engineering Indian Institute of Science, BangaloreDokument38 SeitenAdvanced Control System Design Prof. Radhakant Padhi Department of Aerospace Engineering Indian Institute of Science, BangaloreJai SebastianNoch keine Bewertungen
- Solid Mechanics Syllabus ME223Dokument1 SeiteSolid Mechanics Syllabus ME223Mulu GirmayNoch keine Bewertungen
- Sand CDokument4 SeitenSand Cer_aman11Noch keine Bewertungen
- Machine Design SyllabusDokument1 SeiteMachine Design SyllabusMulu GirmayNoch keine Bewertungen
- GFHJDokument31 SeitenGFHJnitinpandhiNoch keine Bewertungen
- ME101 Enginering Mechanics SyllabusDokument1 SeiteME101 Enginering Mechanics SyllabusMulu GirmayNoch keine Bewertungen
- Theory of Machine SyllabusDokument3 SeitenTheory of Machine SyllabusMulu GirmayNoch keine Bewertungen
- Complex Variables & Numerical Methods (2141905)Dokument3 SeitenComplex Variables & Numerical Methods (2141905)NeelNoch keine Bewertungen
- IE 423 Syllabus Computer Aided ManufacturingDokument1 SeiteIE 423 Syllabus Computer Aided ManufacturingMulu GirmayNoch keine Bewertungen
- KomDokument2 SeitenKomRavi SidhpuriaNoch keine Bewertungen
- Advanced Control Systems SyllabusDokument2 SeitenAdvanced Control Systems SyllabusMulu GirmayNoch keine Bewertungen
- Electrical Machines Controls Nee 409 Eee 409 2015 16Dokument2 SeitenElectrical Machines Controls Nee 409 Eee 409 2015 16Mulu GirmayNoch keine Bewertungen
- Hydraulics and Pneumatics SyllabusDokument2 SeitenHydraulics and Pneumatics SyllabusMulu Girmay67% (3)
- Gujarat Technological University: Computational Method For Mechanical Engineering M.E. 1 SemesterDokument3 SeitenGujarat Technological University: Computational Method For Mechanical Engineering M.E. 1 SemesterMulu GirmayNoch keine Bewertungen
- Automation and Computer Integrated Manufacturing SyllabusDokument2 SeitenAutomation and Computer Integrated Manufacturing SyllabusMulu GirmayNoch keine Bewertungen
- Advanced Control Systems SyllabusDokument2 SeitenAdvanced Control Systems SyllabusMulu GirmayNoch keine Bewertungen
- Concepts in Mechatronics Engineering SyllabusDokument2 SeitenConcepts in Mechatronics Engineering SyllabusMulu GirmayNoch keine Bewertungen