Das könnte Ihnen auch gefallen
- WWW - Studymaterialz.in: Signal and System Important 30 MCQ PDF With SolutionDokument71 SeitenWWW - Studymaterialz.in: Signal and System Important 30 MCQ PDF With SolutionYash Gopani100% (1)
- Tutorial 2 HaiboDokument5 SeitenTutorial 2 Haiborere rareNoch keine Bewertungen
- IIR Direct Form RealizationDokument69 SeitenIIR Direct Form RealizationAbdul Basit MughalNoch keine Bewertungen
- DSP MCQ's PDFDokument13 SeitenDSP MCQ's PDFMUSHTAREEN HARLAPURNoch keine Bewertungen
- Important MCQ - Signals and SystemsDokument15 SeitenImportant MCQ - Signals and Systemsarijitlgsp0% (2)
- Multiple Choice Questions With Answers On Power Electronics and DrivesDokument3 SeitenMultiple Choice Questions With Answers On Power Electronics and DrivesRaees AslamNoch keine Bewertungen
- Control-System MCQDokument125 SeitenControl-System MCQSanthosh KumarNoch keine Bewertungen
- Power Electronics MCQ ObjectivesDokument2 SeitenPower Electronics MCQ ObjectivesJignesh VyasNoch keine Bewertungen
- IES - Electrical Engineering - Power ElectronicsDokument35 SeitenIES - Electrical Engineering - Power ElectronicsPiyush Chavan100% (1)
- VIGNAN ECE QUESTION BANKDokument15 SeitenVIGNAN ECE QUESTION BANKAdnan Zahid67% (3)
- Unit 1 Antenna Question AnswerDokument14 SeitenUnit 1 Antenna Question AnswerRachit JainNoch keine Bewertungen
- ELECTRICAL CIRCUIT THEORY MCQs PDFDokument9 SeitenELECTRICAL CIRCUIT THEORY MCQs PDFYashNoch keine Bewertungen
- Multiple choice questions on digital logic and computer fundamentalsDokument38 SeitenMultiple choice questions on digital logic and computer fundamentalsavpatil333Noch keine Bewertungen
- Objective Questions. Topic: Number System and CodesDokument56 SeitenObjective Questions. Topic: Number System and Codesthejareddy14Noch keine Bewertungen
- Chapter Three: Ac-Dc Conversion: Controlled RectificationsDokument88 SeitenChapter Three: Ac-Dc Conversion: Controlled Rectificationsyemane gebremichalNoch keine Bewertungen
- Parallel Circuits6. Questions On Power and Power FactorDokument21 SeitenParallel Circuits6. Questions On Power and Power Factorkibrom atsbhaNoch keine Bewertungen
- 22 - 102 Electrical Machine Design - Electrical Engineering Multiple Choice Questions and Answers - MCQs Preparation For Engineering Competitive ExamsDokument11 Seiten22 - 102 Electrical Machine Design - Electrical Engineering Multiple Choice Questions and Answers - MCQs Preparation For Engineering Competitive ExamsHussam Gujjar100% (1)
- Control Systems Unitwise Important Questions Unit 1 Part ADokument10 SeitenControl Systems Unitwise Important Questions Unit 1 Part AChandra shekarNoch keine Bewertungen
- Basic Electronics Mcqs 2Dokument4 SeitenBasic Electronics Mcqs 2khananuNoch keine Bewertungen
- Signals and Spectra QuizDokument5 SeitenSignals and Spectra QuizArjayl Enriquez MartelNoch keine Bewertungen
- AE05 SolDokument135 SeitenAE05 SolVipul MahajanNoch keine Bewertungen
- Choose The Best Answer:: 1. A) B) C) D)Dokument19 SeitenChoose The Best Answer:: 1. A) B) C) D)Basheer NajemNoch keine Bewertungen
- Introduction to Electrical Machines Chapter One: Electromagnetic PrinciplesDokument286 SeitenIntroduction to Electrical Machines Chapter One: Electromagnetic Principlestesfayregs gebretsadik100% (1)
- Microprocessor MCQ CS 2nd YearDokument80 SeitenMicroprocessor MCQ CS 2nd YearMohit SinghNoch keine Bewertungen
- Linear Block Code MatlabDokument1 SeiteLinear Block Code MatlabsaisreeNoch keine Bewertungen
- Multiple Choice Questions and Answers On Digital Communication - PRANSHI - VERMADokument74 SeitenMultiple Choice Questions and Answers On Digital Communication - PRANSHI - VERMAMd Siraj UddinNoch keine Bewertungen
- Linear Variable Differential Transformer (LVDT) PDFDokument3 SeitenLinear Variable Differential Transformer (LVDT) PDFSrirangam RajeshNoch keine Bewertungen
- Modern Electronic Communication 7th Edition by Beasley Miller MCQDokument38 SeitenModern Electronic Communication 7th Edition by Beasley Miller MCQFranch Maverick Arellano LorillaNoch keine Bewertungen
- Lab#2B: Half-Wave Rectifier Circuit Without and With FilterDokument5 SeitenLab#2B: Half-Wave Rectifier Circuit Without and With FilterHemanth GedelaNoch keine Bewertungen
- Optical Communications: Objective QuestionsDokument13 SeitenOptical Communications: Objective QuestionsAllanki Sanyasi RaoNoch keine Bewertungen
- UNIT 4 Analog Circuits MCQs and SolutionsDokument98 SeitenUNIT 4 Analog Circuits MCQs and SolutionsvikramvivNoch keine Bewertungen
- EC2302 DSP Question Bank TitleDokument2 SeitenEC2302 DSP Question Bank TitleSelva Kumarasamy100% (1)
- Cs8351 Digital Principles and System Design MCQDokument53 SeitenCs8351 Digital Principles and System Design MCQveluNoch keine Bewertungen
- Microwave Introduction Objective QuestionsDokument4 SeitenMicrowave Introduction Objective Questionsganesh4u_p0% (1)
- MCQ For Power ElectronicsDokument16 SeitenMCQ For Power ElectronicsNabil Ahmed Ali ElhadyNoch keine Bewertungen
- 8051 CH2Dokument89 Seiten8051 CH2Amardeep PotdarNoch keine Bewertungen
- Ece V Digital Signal Processing (10ec52) NotesDokument161 SeitenEce V Digital Signal Processing (10ec52) NotesDenise Nelson100% (1)
- Introduction To Communication SystemsDokument469 SeitenIntroduction To Communication SystemsAdi Putra Arianto40% (5)
- Chapter 1 - Introduction To Communication SystemDokument61 SeitenChapter 1 - Introduction To Communication SystemIzlaikha AzizNoch keine Bewertungen
- Dac MCQDokument10 SeitenDac MCQTrojan0% (1)
- Scoa Unit 2 MCQS: Question No Answer Key 1. ADokument12 SeitenScoa Unit 2 MCQS: Question No Answer Key 1. AteciNoch keine Bewertungen
- Signal and System Important 30 MCQ PDF With SolutionDokument10 SeitenSignal and System Important 30 MCQ PDF With SolutionRamesh MallaiNoch keine Bewertungen
- SIGNALS & SYSTEMS Objective Questions PDFDokument21 SeitenSIGNALS & SYSTEMS Objective Questions PDFMukesh Sharma100% (2)
- 218 - EC8352, EC6303 Signals and Systems - Question Bank 5Dokument84 Seiten218 - EC8352, EC6303 Signals and Systems - Question Bank 5anakn803Noch keine Bewertungen
- 13 Electric Motors 101Dokument60 Seiten13 Electric Motors 101Sairam A J 18MAC0002Noch keine Bewertungen
- 7 I LB 2 V VL I1 YYl SYBXSTIDokument23 Seiten7 I LB 2 V VL I1 YYl SYBXSTIGingka HaganeNoch keine Bewertungen
- Signals and SystemsDokument69 SeitenSignals and Systemsanand_kkrNoch keine Bewertungen
- Signal System ObjectiveDokument82 SeitenSignal System ObjectiveNitin Kathuria100% (3)
- Method of DerivativeDokument4 SeitenMethod of DerivativeSOHAM CHATTERJEENoch keine Bewertungen
- EEE-282N - S&S Quiz, U-1,2 - SolutionsDokument2 SeitenEEE-282N - S&S Quiz, U-1,2 - SolutionsMohammad Umar RehmanNoch keine Bewertungen
- GATE-Electronics & Comm (ECE) - 2008Dokument29 SeitenGATE-Electronics & Comm (ECE) - 2008Shirshendu PanditNoch keine Bewertungen
- Tutorial 2-2Dokument2 SeitenTutorial 2-2rb6h58qcz5Noch keine Bewertungen
- Laplace QuesDokument14 SeitenLaplace QuesParas JainNoch keine Bewertungen
- GATE ME 1991 Question PaperDokument13 SeitenGATE ME 1991 Question PaperFlyNarutoFly27Noch keine Bewertungen
- AMIETE – ET/CS/IT (OLD SCHEME) SIGNALS & SYSTEMS EXAM WITH QUESTIONS ON TRANSFORMS, SYSTEMS AND RANDOM PROCESSESDokument4 SeitenAMIETE – ET/CS/IT (OLD SCHEME) SIGNALS & SYSTEMS EXAM WITH QUESTIONS ON TRANSFORMS, SYSTEMS AND RANDOM PROCESSESJonas ParreñoNoch keine Bewertungen
- Mid Term Solutions PDFDokument2 SeitenMid Term Solutions PDFMd Nur-A-Adam DonyNoch keine Bewertungen
- Midterm Exam: Signal and System-100 Minutes Code 1Dokument16 SeitenMidterm Exam: Signal and System-100 Minutes Code 1HongThinh NguyenNoch keine Bewertungen
- Bilinear Mapping of Analog Filters to Digital FiltersDokument33 SeitenBilinear Mapping of Analog Filters to Digital FiltersHarold GealanNoch keine Bewertungen
- Final 13Dokument3 SeitenFinal 13Sutirtha SenguptaNoch keine Bewertungen
- Z-Transform and Laplace Transform SolutionsDokument10 SeitenZ-Transform and Laplace Transform SolutionsRotem CalisirNoch keine Bewertungen
- Israel-Hamas War - Gauging The Impact - 231026 - 184041Dokument5 SeitenIsrael-Hamas War - Gauging The Impact - 231026 - 184041nagalakshmi nNoch keine Bewertungen
- Centrum On Jio Financial Services Fuel in Place, Engine About ToDokument5 SeitenCentrum On Jio Financial Services Fuel in Place, Engine About ToSantosh KumarNoch keine Bewertungen
- Halo.S01E01.1080p.WEB .h264-KOGi.v2.srtDokument49 SeitenHalo.S01E01.1080p.WEB .h264-KOGi.v2.srtSantosh KumarNoch keine Bewertungen
- 2298Dokument16 Seiten2298Santosh KumarNoch keine Bewertungen
- Neev Booklet Quant Complete E Book For Banking Insurance Exam MathsDokument289 SeitenNeev Booklet Quant Complete E Book For Banking Insurance Exam Mathswarwizard06012001Noch keine Bewertungen
- Current Affairs December Question & Answer 2017 PDF by AffairsCloudDokument60 SeitenCurrent Affairs December Question & Answer 2017 PDF by AffairsCloudDeepika KannanNoch keine Bewertungen
- Related Products: Keeps Your Spine, Just !neDokument1 SeiteRelated Products: Keeps Your Spine, Just !neSantosh KumarNoch keine Bewertungen
- What Is Term Insurance - 1677145987Dokument7 SeitenWhat Is Term Insurance - 1677145987Santosh KumarNoch keine Bewertungen
- BhajjiDokument1 SeiteBhajjiSantosh KumarNoch keine Bewertungen
- Dtioi KnowDokument1 SeiteDtioi KnowSantosh KumarNoch keine Bewertungen
- 2298Dokument16 Seiten2298Santosh KumarNoch keine Bewertungen
- 2298Dokument16 Seiten2298Santosh KumarNoch keine Bewertungen
- Subject: Annexure - Ii Scheme and Syllabus For Group-Ii ServicesDokument8 SeitenSubject: Annexure - Ii Scheme and Syllabus For Group-Ii ServicesdamuNoch keine Bewertungen
- Subject: Annexure - Ii Scheme and Syllabus For Group-Ii ServicesDokument8 SeitenSubject: Annexure - Ii Scheme and Syllabus For Group-Ii ServicesdamuNoch keine Bewertungen
- English Grammar 28-01-2017Dokument366 SeitenEnglish Grammar 28-01-2017Santosh KumarNoch keine Bewertungen
- AP Transco AE Exam Syllabus & Sample QuestionsDokument1 SeiteAP Transco AE Exam Syllabus & Sample QuestionsD J BravoNoch keine Bewertungen
- Notification SAIL Rourkela Steel Plant JR Manager Operator Cum Technician PostsDokument7 SeitenNotification SAIL Rourkela Steel Plant JR Manager Operator Cum Technician PostsSantosh KumarNoch keine Bewertungen
- reasoningning-Practice-Book-for-SSC-CGL-2017-www - Exampundit.in-Visit Today PDFDokument35 Seitenreasoningning-Practice-Book-for-SSC-CGL-2017-www - Exampundit.in-Visit Today PDFSubburajMechNoch keine Bewertungen
- 6137aa5b - ELO Walk - in - Interview AdvertisementDokument2 Seiten6137aa5b - ELO Walk - in - Interview AdvertisementSantosh KumarNoch keine Bewertungen
- Recruitment of Junior Executive On Fixed Tenure Contract BasisDokument3 SeitenRecruitment of Junior Executive On Fixed Tenure Contract BasisSantosh KumarNoch keine Bewertungen
- Learn Hindi Through English PDFDokument106 SeitenLearn Hindi Through English PDFKevin Raman65% (20)
- Electrical Engineering Objective Questions Part 1 PDFDokument14 SeitenElectrical Engineering Objective Questions Part 1 PDFLeowil Gabrielle Altares EvangelioNoch keine Bewertungen
- E KYCDokument10 SeitenE KYCvblniNoch keine Bewertungen
- Notification RITES Limited Engineer PostsDokument5 SeitenNotification RITES Limited Engineer PostsSantosh KumarNoch keine Bewertungen
- Corporate Governance, Corporate Profitability Toward Corporate Social Responsibility Disclosure and Corporate Value (Comparative Study in Indonesia, China and India Stock Exchange in 2013-2016) .Dokument18 SeitenCorporate Governance, Corporate Profitability Toward Corporate Social Responsibility Disclosure and Corporate Value (Comparative Study in Indonesia, China and India Stock Exchange in 2013-2016) .Lia asnamNoch keine Bewertungen
- Analyze and Design Sewer and Stormwater Systems with SewerGEMSDokument18 SeitenAnalyze and Design Sewer and Stormwater Systems with SewerGEMSBoni ClydeNoch keine Bewertungen
- Open Far CasesDokument8 SeitenOpen Far CasesGDoony8553Noch keine Bewertungen
- Physioex 9.0 Exercise 1 Act 1Dokument5 SeitenPhysioex 9.0 Exercise 1 Act 1Adela LhuzNoch keine Bewertungen
- A Reconfigurable Wing For Biomimetic AircraftDokument12 SeitenA Reconfigurable Wing For Biomimetic AircraftMoses DevaprasannaNoch keine Bewertungen
- JM Guide To ATE Flier (c2020)Dokument2 SeitenJM Guide To ATE Flier (c2020)Maged HegabNoch keine Bewertungen
- Flowmon Ads Enterprise Userguide enDokument82 SeitenFlowmon Ads Enterprise Userguide ennagasatoNoch keine Bewertungen
- A Princess of Mars Part 3Dokument4 SeitenA Princess of Mars Part 3Sheila Inca100% (1)
- AtlasConcorde NashDokument35 SeitenAtlasConcorde NashMadalinaNoch keine Bewertungen
- Dance Appreciation and CompositionDokument1 SeiteDance Appreciation and CompositionFretz Ael100% (1)
- SOP-for RecallDokument3 SeitenSOP-for RecallNilove PervezNoch keine Bewertungen
- Easa Management System Assessment ToolDokument40 SeitenEasa Management System Assessment ToolAdam Tudor-danielNoch keine Bewertungen
- Stroboscopy For Benign Laryngeal Pathology in Evidence Based Health CareDokument5 SeitenStroboscopy For Benign Laryngeal Pathology in Evidence Based Health CareDoina RusuNoch keine Bewertungen
- Mounting InstructionDokument1 SeiteMounting InstructionAkshay GargNoch keine Bewertungen
- Breaking NewsDokument149 SeitenBreaking NewstigerlightNoch keine Bewertungen
- Composite Structures: A. Grimaldi, A. Sollo, M. Guida, F. MaruloDokument15 SeitenComposite Structures: A. Grimaldi, A. Sollo, M. Guida, F. MaruloSharan KharthikNoch keine Bewertungen
- A Guide To in The: First AidDokument20 SeitenA Guide To in The: First AidsanjeevchsNoch keine Bewertungen
- Command List-6Dokument3 SeitenCommand List-6Carlos ArbelaezNoch keine Bewertungen
- Beauty ProductDokument12 SeitenBeauty ProductSrishti SoniNoch keine Bewertungen
- Masteringphys 14Dokument20 SeitenMasteringphys 14CarlosGomez0% (3)
- AD Chemicals - Freeze-Flash PointDokument4 SeitenAD Chemicals - Freeze-Flash Pointyb3yonnayNoch keine Bewertungen
- Speed Reducer GearboxDokument14 SeitenSpeed Reducer Gearboxعبد للهNoch keine Bewertungen
- Bula Defense M14 Operator's ManualDokument32 SeitenBula Defense M14 Operator's ManualmeNoch keine Bewertungen
- Business Case PresentationDokument27 SeitenBusiness Case Presentationapi-253435256Noch keine Bewertungen
- Aries Computer Repair SolutionsDokument9 SeitenAries Computer Repair SolutionsedalzurcNoch keine Bewertungen
- Flexible Regression and Smoothing - Using GAMLSS in RDokument572 SeitenFlexible Regression and Smoothing - Using GAMLSS in RDavid50% (2)
- Factors of Active Citizenship EducationDokument2 SeitenFactors of Active Citizenship EducationmauïNoch keine Bewertungen
- Advantages of Using Mobile ApplicationsDokument30 SeitenAdvantages of Using Mobile ApplicationsGian Carlo LajarcaNoch keine Bewertungen
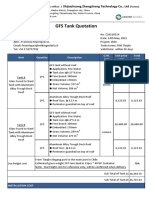
- GFS Tank Quotation C20210514Dokument4 SeitenGFS Tank Quotation C20210514Francisco ManriquezNoch keine Bewertungen
- Done - NSTP 2 SyllabusDokument9 SeitenDone - NSTP 2 SyllabusJoseph MazoNoch keine Bewertungen
- Introduction to Power System ProtectionVon EverandIntroduction to Power System ProtectionBewertung: 5 von 5 Sternen5/5 (1)
- Shorting the Grid: The Hidden Fragility of Our Electric GridVon EverandShorting the Grid: The Hidden Fragility of Our Electric GridBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Nuclear Energy in the 21st Century: World Nuclear University PressVon EverandNuclear Energy in the 21st Century: World Nuclear University PressBewertung: 4.5 von 5 Sternen4.5/5 (3)
- Introduction to Power System ProtectionVon EverandIntroduction to Power System ProtectionNoch keine Bewertungen
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesVon EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesBewertung: 4.5 von 5 Sternen4.5/5 (21)
- Idaho Falls: The Untold Story of America's First Nuclear AccidentVon EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentBewertung: 4.5 von 5 Sternen4.5/5 (21)
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialVon EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialNoch keine Bewertungen
- OFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyVon EverandOFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyNoch keine Bewertungen
- Asset Integrity Management for Offshore and Onshore StructuresVon EverandAsset Integrity Management for Offshore and Onshore StructuresNoch keine Bewertungen
- Renewable Energy: A Very Short IntroductionVon EverandRenewable Energy: A Very Short IntroductionBewertung: 4.5 von 5 Sternen4.5/5 (12)
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successVon EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successBewertung: 4.5 von 5 Sternen4.5/5 (3)
- Build Your Own Electric Vehicle, Third EditionVon EverandBuild Your Own Electric Vehicle, Third EditionBewertung: 4.5 von 5 Sternen4.5/5 (3)
- The Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeVon EverandThe Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeBewertung: 4 von 5 Sternen4/5 (130)
- The Grid: The Fraying Wires Between Americans and Our Energy FutureVon EverandThe Grid: The Fraying Wires Between Americans and Our Energy FutureBewertung: 3.5 von 5 Sternen3.5/5 (48)
- Implementing an Integrated Management System (IMS): The strategic approachVon EverandImplementing an Integrated Management System (IMS): The strategic approachBewertung: 5 von 5 Sternen5/5 (2)
- Handbook on Battery Energy Storage SystemVon EverandHandbook on Battery Energy Storage SystemBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Produced Water Treatment Field ManualVon EverandProduced Water Treatment Field ManualBewertung: 4.5 von 5 Sternen4.5/5 (5)
- Energy, Light and Electricity - Introduction to Physics - Physics Book for 12 Year Old | Children's Physics BooksVon EverandEnergy, Light and Electricity - Introduction to Physics - Physics Book for 12 Year Old | Children's Physics BooksNoch keine Bewertungen
- Industrial Piping and Equipment Estimating ManualVon EverandIndustrial Piping and Equipment Estimating ManualBewertung: 5 von 5 Sternen5/5 (7)
- The Rare Metals War: the dark side of clean energy and digital technologiesVon EverandThe Rare Metals War: the dark side of clean energy and digital technologiesBewertung: 5 von 5 Sternen5/5 (2)
- ISO 50001: A strategic guide to establishing an energy management systemVon EverandISO 50001: A strategic guide to establishing an energy management systemNoch keine Bewertungen
- The Way Home: Tales from a life without technologyVon EverandThe Way Home: Tales from a life without technologyBewertung: 4 von 5 Sternen4/5 (45)
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsVon EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNoch keine Bewertungen
- Machine Learning and Data Science in the Oil and Gas Industry: Best Practices, Tools, and Case StudiesVon EverandMachine Learning and Data Science in the Oil and Gas Industry: Best Practices, Tools, and Case StudiesPatrick BangertBewertung: 3 von 5 Sternen3/5 (2)
- Solar Electricity Basics: Powering Your Home or Office with Solar EnergyVon EverandSolar Electricity Basics: Powering Your Home or Office with Solar EnergyBewertung: 5 von 5 Sternen5/5 (3)
- Oil and Gas Pipelines and Piping Systems: Design, Construction, Management, and InspectionVon EverandOil and Gas Pipelines and Piping Systems: Design, Construction, Management, and InspectionBewertung: 4.5 von 5 Sternen4.5/5 (16)