Das könnte Ihnen auch gefallen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- ECEN720: High-Speed Links Circuits and Systems Spring 2021: Lecture 5: Termination, TX Driver, & Multiplexer CircuitsDokument66 SeitenECEN720: High-Speed Links Circuits and Systems Spring 2021: Lecture 5: Termination, TX Driver, & Multiplexer Circuits陈晨Noch keine Bewertungen
- Multi-Phase DC/DC Controller For CPU Core Power Supply: General Description FeaturesDokument14 SeitenMulti-Phase DC/DC Controller For CPU Core Power Supply: General Description FeaturesTeles SilvaNoch keine Bewertungen
- Infineon EiceDRIVER - 1EDN - TDI ProductBrief v02 - 00 EN PDFDokument2 SeitenInfineon EiceDRIVER - 1EDN - TDI ProductBrief v02 - 00 EN PDFPratik MishraNoch keine Bewertungen
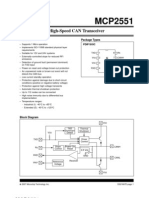
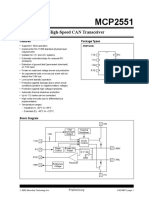
- High-Speed CAN Transceiver: Features Package TypesDokument23 SeitenHigh-Speed CAN Transceiver: Features Package TypesSe SavNoch keine Bewertungen
- CNC Shield For A4988Dokument7 SeitenCNC Shield For A4988vaxewiNoch keine Bewertungen
- MCP 2551Dokument24 SeitenMCP 2551senguttuvelNoch keine Bewertungen
- MAX4238-MAX4239 - AmplificadorDokument10 SeitenMAX4238-MAX4239 - AmplificadorJeferson FraytagNoch keine Bewertungen
- MCP 2551Dokument20 SeitenMCP 2551Duy KhaNoch keine Bewertungen
- Low Noise, Low Power Op Amp: Features DescriptionDokument28 SeitenLow Noise, Low Power Op Amp: Features DescriptionSwapnil BangarNoch keine Bewertungen
- EL6257C - Product Brief: General Description FeaturesDokument2 SeitenEL6257C - Product Brief: General Description FeaturesDimo DimoNoch keine Bewertungen
- Dual-Phase DC-DC Controller For AMD Mobile CPU: Features General DescriptionDokument7 SeitenDual-Phase DC-DC Controller For AMD Mobile CPU: Features General Descriptionlordycarlos8588Noch keine Bewertungen
- DACDokument28 SeitenDACRohith Mohan100% (1)
- U708Dokument28 SeitenU708Sol De GabrielNoch keine Bewertungen
- Isolated High-Speed CAN Transceiver: Functional Diagram FeaturesDokument10 SeitenIsolated High-Speed CAN Transceiver: Functional Diagram FeaturesPete CooperNoch keine Bewertungen
- Max 14866Dokument23 SeitenMax 14866hibluedeerNoch keine Bewertungen
- Types of PsuDokument50 SeitenTypes of PsusubhajitNoch keine Bewertungen
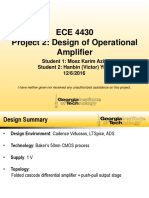
- Sample1 Project2 ECE4430 F16Dokument20 SeitenSample1 Project2 ECE4430 F16Digvijay Bansal JiiggiNoch keine Bewertungen
- Gate Driver Circuit For Three Phase InverterDokument13 SeitenGate Driver Circuit For Three Phase InverterMarc TcheukabaNoch keine Bewertungen
- Hysteretic Boost-Buck (Ćuk) LED Driver IC: Features General DescriptionDokument16 SeitenHysteretic Boost-Buck (Ćuk) LED Driver IC: Features General DescriptionJohnNoch keine Bewertungen
- 1 6 & 2 3 DEWA Training - Inverters - Ammar-R3Dokument51 Seiten1 6 & 2 3 DEWA Training - Inverters - Ammar-R3jayapalNoch keine Bewertungen
- Selecting and Using RS-232, RS-422, and RS-485 Serial Data StandardsDokument10 SeitenSelecting and Using RS-232, RS-422, and RS-485 Serial Data StandardsMochamad Rizal JauhariNoch keine Bewertungen
- Description Features: Preliminary and All Contents Are Subject To Change Without Prior NoticeDokument8 SeitenDescription Features: Preliminary and All Contents Are Subject To Change Without Prior NoticeLuisNoch keine Bewertungen
- High-Speed CAN Transceiver: Features Package TypesDokument24 SeitenHigh-Speed CAN Transceiver: Features Package TypeswhcallegariNoch keine Bewertungen
- 19ec401 - Ec1 - 2021 - 2022 Lab Manual PDFDokument53 Seiten19ec401 - Ec1 - 2021 - 2022 Lab Manual PDFKarthi&coNoch keine Bewertungen
- A-D Conversion: Using Neural NetworksDokument19 SeitenA-D Conversion: Using Neural NetworksShivansh DwivediNoch keine Bewertungen
- Ald1502 Datasheet 1Dokument4 SeitenAld1502 Datasheet 1Dylan FlorezNoch keine Bewertungen
- Tda 8588 AjDokument54 SeitenTda 8588 AjAngel Fig100% (1)
- 12-V Voltage Sensing Circuit With An Isolated AmplifierDokument8 Seiten12-V Voltage Sensing Circuit With An Isolated AmplifierSirJones KekapohNoch keine Bewertungen
- Single Loop PLDRO Rev6.0Dokument7 SeitenSingle Loop PLDRO Rev6.0mechmaster4uNoch keine Bewertungen
- TC1413/TC1413N: 3A High-Speed MOSFET DriversDokument24 SeitenTC1413/TC1413N: 3A High-Speed MOSFET DriverskarimNoch keine Bewertungen
- Ks8803B 10/15 CH PLLDokument11 SeitenKs8803B 10/15 CH PLLTopaz ReyesNoch keine Bewertungen
- MT 6215 Digital Electronic II.4Dokument14 SeitenMT 6215 Digital Electronic II.4jonathan stevenNoch keine Bewertungen
- Selecting and Using RS-232, RS-422, and RS-485 Serial Data StandardsDokument9 SeitenSelecting and Using RS-232, RS-422, and RS-485 Serial Data StandardsCarlos Roman Zarza100% (1)
- Description: Green-Power PWM Controller With Freq. JigglingDokument8 SeitenDescription: Green-Power PWM Controller With Freq. JigglingLuis GuevaraNoch keine Bewertungen
- Rn5Rf Series: OutlineDokument14 SeitenRn5Rf Series: OutlineVlady Lopez CastroNoch keine Bewertungen
- Multi VibratorDokument9 SeitenMulti VibratormwaniaabediNoch keine Bewertungen
- Cargador Enercell cr623xDokument11 SeitenCargador Enercell cr623xcuco777Noch keine Bewertungen
- RF LDMOS Wideband Integrated Power Amplifier: MMRF2004NBR1Dokument19 SeitenRF LDMOS Wideband Integrated Power Amplifier: MMRF2004NBR1bulli babuNoch keine Bewertungen
- RF LDMOS Wideband Integrated Power Amplifier: MHV5IC1810NR2Dokument17 SeitenRF LDMOS Wideband Integrated Power Amplifier: MHV5IC1810NR2mohsengsmNoch keine Bewertungen
- LTC3612Dokument30 SeitenLTC3612Alexandr IvanovNoch keine Bewertungen
- Rp154X Series: 300ma Small Dual Ldo RegulatorDokument26 SeitenRp154X Series: 300ma Small Dual Ldo RegulatorSebastian IgnacioNoch keine Bewertungen
- @6 - Power Electronics - Thyristors - Part I - v2 - ReducedDokument258 Seiten@6 - Power Electronics - Thyristors - Part I - v2 - ReducedKhanh ĐỗNoch keine Bewertungen
- LTC6228 6229 PDFDokument30 SeitenLTC6228 6229 PDFAdhima A. BudionoNoch keine Bewertungen
- RA80H1415M1Dokument11 SeitenRA80H1415M1กู้ภัย ตัวท๊อปNoch keine Bewertungen
- Can Driver Ram 2005 Ecus Marco EsteliDokument27 SeitenCan Driver Ram 2005 Ecus Marco EsteliautocomputerNoch keine Bewertungen
- R1202x Series: Step-Up DC/DC Converter With Shutdown Function OutlineDokument33 SeitenR1202x Series: Step-Up DC/DC Converter With Shutdown Function OutlineajisardadiNoch keine Bewertungen
- Ecen 607 CMFB-2011Dokument44 SeitenEcen 607 CMFB-2011Girish K NathNoch keine Bewertungen
- CR6235 6236 6238 - DatasheetDokument10 SeitenCR6235 6236 6238 - Datasheetsick79Noch keine Bewertungen
- Datasheet Bd9422efvDokument28 SeitenDatasheet Bd9422efvj0rge avendañoNoch keine Bewertungen
- LM3414/LM3414HV 1A 60W Common Anode Capable Constant Current Buck LED Driver Requires No External Current Sensing ResistorDokument20 SeitenLM3414/LM3414HV 1A 60W Common Anode Capable Constant Current Buck LED Driver Requires No External Current Sensing ResistorAyala KarlNoch keine Bewertungen
- CD4066BMS: Description FeaturesDokument9 SeitenCD4066BMS: Description FeaturesKhuyến TrầnNoch keine Bewertungen
- Draft Sight Getting Started GuideDokument70 SeitenDraft Sight Getting Started Guidesteviej85Noch keine Bewertungen
- Differential AmplifierDokument24 SeitenDifferential Amplifierbommena vishwa tejaNoch keine Bewertungen
- STR5A464x Series Data Sheet: For Non-Isolated Off-Line PWM Controllers With Integrated Power MOSFETDokument23 SeitenSTR5A464x Series Data Sheet: For Non-Isolated Off-Line PWM Controllers With Integrated Power MOSFETHeru susantoNoch keine Bewertungen
- An Analog Current Controller Design For Laser Diodes: Todd P. MeyrathDokument7 SeitenAn Analog Current Controller Design For Laser Diodes: Todd P. MeyrathAfzal345Noch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Bewertung: 2.5 von 5 Sternen2.5/5 (3)
- CDR ModelDokument22 SeitenCDR ModelMohamed MegahedNoch keine Bewertungen
- CDR Linear Model PDFDokument139 SeitenCDR Linear Model PDFMohamed MegahedNoch keine Bewertungen
- Laskin MASc Thesis PDFDokument102 SeitenLaskin MASc Thesis PDFMohamed MegahedNoch keine Bewertungen
- Lecture10 Ee720 Jitter PDFDokument25 SeitenLecture10 Ee720 Jitter PDFMohamed MegahedNoch keine Bewertungen
- LAB2 Mixer Tutorial PDFDokument20 SeitenLAB2 Mixer Tutorial PDFMohamed MegahedNoch keine Bewertungen
- Faculty of Engineering: Lexandria NiversityDokument2 SeitenFaculty of Engineering: Lexandria NiversityMohamed MegahedNoch keine Bewertungen
- Design of Processing Circuitry For An RF Energy HarvesterDokument42 SeitenDesign of Processing Circuitry For An RF Energy HarvesterMohamed MegahedNoch keine Bewertungen
- CDR Linear ModelDokument139 SeitenCDR Linear ModelMohamed MegahedNoch keine Bewertungen
- LNA Lab TutorialDokument17 SeitenLNA Lab TutorialMohamed MegahedNoch keine Bewertungen
- IS301 P1 Theory June 2021 P1 TheoryDokument20 SeitenIS301 P1 Theory June 2021 P1 Theory50902849Noch keine Bewertungen
- Materi Basic Safety #1Dokument32 SeitenMateri Basic Safety #1Galih indrahutama100% (1)
- PneumaxDokument2 SeitenPneumaxandresNoch keine Bewertungen
- Workflows in RUP PDFDokument9 SeitenWorkflows in RUP PDFDurval NetoNoch keine Bewertungen
- Fax Cross ReferenceDokument32 SeitenFax Cross ReferenceBranga CorneliuNoch keine Bewertungen
- Ex Covid Shift ADokument1 SeiteEx Covid Shift ADetri Yoga AdhiNoch keine Bewertungen
- P12. & P.13 Faculty List With Designation, Qualification, Joining Date, Publication, Citation, R&D, Interaction DetailsDokument11 SeitenP12. & P.13 Faculty List With Designation, Qualification, Joining Date, Publication, Citation, R&D, Interaction DetailsNeelamani SamalNoch keine Bewertungen
- Ngo OrganizationsDokument2 SeitenNgo Organizationsapi-295384272100% (1)
- " Distribution Channel of Pepsi in Hajipur ": Project ReportDokument79 Seiten" Distribution Channel of Pepsi in Hajipur ": Project ReportnavneetNoch keine Bewertungen
- Unit 5 PythonDokument10 SeitenUnit 5 PythonVikas PareekNoch keine Bewertungen
- Cisa 2Dokument6 SeitenCisa 2Ahmad MaaytahNoch keine Bewertungen
- ImpulZ DocumentationDokument9 SeitenImpulZ DocumentationexportcompNoch keine Bewertungen
- 54 Sale1Dokument6 Seiten54 Sale1vakilarunNoch keine Bewertungen
- ECEN 160 Final Project Logisim Instrs and DecoderDokument2 SeitenECEN 160 Final Project Logisim Instrs and DecoderEvandro Fernandes LedemaNoch keine Bewertungen
- Privatization of ExtensionDokument49 SeitenPrivatization of ExtensionLiam Tesat67% (3)
- Edu 637 Lesson Plan Gallivan TerryDokument11 SeitenEdu 637 Lesson Plan Gallivan Terryapi-161680522Noch keine Bewertungen
- CH03 HKM Law Investigation and EthicsDokument32 SeitenCH03 HKM Law Investigation and Ethicsmilkikoo shiferaNoch keine Bewertungen
- Firearm Laws in PennsylvaniaDokument2 SeitenFirearm Laws in PennsylvaniaJesse WhiteNoch keine Bewertungen
- Cima E1 2019 Notes Managing Finance in A Digital WorldDokument91 SeitenCima E1 2019 Notes Managing Finance in A Digital Worldumarfarooque869Noch keine Bewertungen
- IT Disaster Recovery Planning ChecklistDokument2 SeitenIT Disaster Recovery Planning ChecklistYawe Kizito Brian PaulNoch keine Bewertungen
- Gaps, Pro Versus NoviceDokument2 SeitenGaps, Pro Versus Novicertkiyous2947Noch keine Bewertungen
- RTP Cap III GR I June 2022Dokument92 SeitenRTP Cap III GR I June 2022मदन कुमार बिस्टNoch keine Bewertungen
- BTK - A318 - A319 - A320 - A321 - IPC - 01-Aug-2019 - FIG. 79-00-00-09 - TUBES SCAVENGE INSTL-CFM56 Zone(s) 400 (Aug 01 - 19)Dokument2 SeitenBTK - A318 - A319 - A320 - A321 - IPC - 01-Aug-2019 - FIG. 79-00-00-09 - TUBES SCAVENGE INSTL-CFM56 Zone(s) 400 (Aug 01 - 19)Irfan05Noch keine Bewertungen
- Special Power of AttorneyDokument1 SeiteSpecial Power of Attorneywecans izza100% (1)
- Soal PAS-UAS Bahasa Inggris Kelas 11 SMADokument10 SeitenSoal PAS-UAS Bahasa Inggris Kelas 11 SMAAlexander TristanNoch keine Bewertungen
- Want To Buy & Sell Expired Domain Names-Follow These 3 StepsDokument6 SeitenWant To Buy & Sell Expired Domain Names-Follow These 3 StepsEmiemNoch keine Bewertungen
- RRLDokument4 SeitenRRLWen Jin ChoiNoch keine Bewertungen
- SD HospitalDokument2 SeitenSD HospitalSam PowelNoch keine Bewertungen
- Murugan Temple of North America: Ahkpuf F Gankd - FZGJP JizDokument8 SeitenMurugan Temple of North America: Ahkpuf F Gankd - FZGJP JizOurMuruganTempleNoch keine Bewertungen
- Avimator Beginners GuideDokument13 SeitenAvimator Beginners GuideluluzichaNoch keine Bewertungen