Das könnte Ihnen auch gefallen
- Exploring BeagleBone: Tools and Techniques for Building with Embedded LinuxVon EverandExploring BeagleBone: Tools and Techniques for Building with Embedded LinuxBewertung: 4 von 5 Sternen4/5 (2)
- Projects With Microcontrollers And PICCVon EverandProjects With Microcontrollers And PICCBewertung: 5 von 5 Sternen5/5 (1)
- Muntinlupa TrainingDokument3 SeitenMuntinlupa TrainingantoinnevongenesisNoch keine Bewertungen
- Arduino Control Car V2 byDokument4 SeitenArduino Control Car V2 byMikaela E Ramírez HerreraNoch keine Bewertungen
- ObjectivesDokument3 SeitenObjectivesMara TañgonanNoch keine Bewertungen
- Line Follower RobotDokument13 SeitenLine Follower RobotAzam KhanNoch keine Bewertungen
- Code UDokument4 SeitenCode Ukaloy33Noch keine Bewertungen
- DocumentDokument4 SeitenDocumentomri29949Noch keine Bewertungen
- Arduino PracticasDokument10 SeitenArduino PracticasFrancisco David IcazaNoch keine Bewertungen
- Programming With ArduinoDokument74 SeitenProgramming With ArduinoGURSIMRAN SINGHNoch keine Bewertungen
- Project 1 Arduino Smart CarDokument9 SeitenProject 1 Arduino Smart CarKnews SkopjeNoch keine Bewertungen
- Programming With Arduino: Course URL: Uggy/homeDokument74 SeitenProgramming With Arduino: Course URL: Uggy/homeAstha AggarwalNoch keine Bewertungen
- Driver Motor - InoDokument3 SeitenDriver Motor - InoJohn Bryan LanguidoNoch keine Bewertungen
- PruebaDokument2 SeitenPruebaAngelique Jimenez CarbajalNoch keine Bewertungen
- Csed LabDokument83 SeitenCsed LabÈshâñ ÇháddâNoch keine Bewertungen
- Programacion para Robot ZumoDokument3 SeitenProgramacion para Robot Zumoandres angel salinasNoch keine Bewertungen
- Laporan HS2 02 - OUTPUT Bag2Dokument5 SeitenLaporan HS2 02 - OUTPUT Bag2Gyan Popong EkasatriaNoch keine Bewertungen
- ECEN85 - Conveyor Belt With Pick and Place Arm - GROUP4Dokument10 SeitenECEN85 - Conveyor Belt With Pick and Place Arm - GROUP4Cenon Lumabad IIINoch keine Bewertungen
- HKBK College of Engineering, BengaluruDokument78 SeitenHKBK College of Engineering, BengaluruSavanNoch keine Bewertungen
- Fa20 BCS 026,049,054,060Dokument3 SeitenFa20 BCS 026,049,054,060malkNoch keine Bewertungen
- Automatic Fire Fighting Robot - InoDokument4 SeitenAutomatic Fire Fighting Robot - InoMuhammad UsamaNoch keine Bewertungen
- Arduion Experiment WorkDokument21 SeitenArduion Experiment Workmohamed ramadanNoch keine Bewertungen
- Arduino ExpoDokument9 SeitenArduino Expo'Andres TorregrosaNoch keine Bewertungen
- Interfacing A VOR/LOC/Glideslope Indicator byDokument17 SeitenInterfacing A VOR/LOC/Glideslope Indicator byeumesmo222Noch keine Bewertungen
- Contoh Program ArduinoDokument29 SeitenContoh Program Arduinohervina kirunaNoch keine Bewertungen
- Arduion Experiment WorkDokument21 SeitenArduion Experiment Workmohamed ramadanNoch keine Bewertungen
- Arduino ExampleDokument25 SeitenArduino ExampleUYeMin HtikeNoch keine Bewertungen
- Reglarea Vitezei La MCCDokument10 SeitenReglarea Vitezei La MCCGaby AxlNoch keine Bewertungen
- Module 5Dokument65 SeitenModule 5Shilpa ShridharNoch keine Bewertungen
- WiFi Robot Remo-WPS OfficeDokument11 SeitenWiFi Robot Remo-WPS OfficeJohn Bryan LanguidoNoch keine Bewertungen
- PROGRAMA AUDUINO Auto Con GruaDokument4 SeitenPROGRAMA AUDUINO Auto Con GruaMarcelo VargasNoch keine Bewertungen
- IOT AssignmentDokument8 SeitenIOT Assignment09Samrat Bikram ShahNoch keine Bewertungen
- Obstacle W Line TraceDokument3 SeitenObstacle W Line TraceBern SalvadorNoch keine Bewertungen
- The Good OneDokument5 SeitenThe Good Oneapi-379298286Noch keine Bewertungen
- l9110 2 Channel Motor DriverDokument5 Seitenl9110 2 Channel Motor DriverOlmer GarciaNoch keine Bewertungen
- PWM DC With RPWM & LPWM NewDokument2 SeitenPWM DC With RPWM & LPWM NewsriramNoch keine Bewertungen
- ARDUINO Tinkercad Practices - NoDokument116 SeitenARDUINO Tinkercad Practices - NoDavidNoch keine Bewertungen
- Line Follower and Obstacle Avoiding Robot - InoDokument4 SeitenLine Follower and Obstacle Avoiding Robot - Inoakuladamodhar20Noch keine Bewertungen
- Códigos Prácticas ARDUINODokument5 SeitenCódigos Prácticas ARDUINODaríoRodríguezBarriadaNoch keine Bewertungen
- Arduino ExamplesDokument16 SeitenArduino ExamplesKapila WijayaratneNoch keine Bewertungen
- Arduino - DigitalWriteDokument3 SeitenArduino - DigitalWritebabaNoch keine Bewertungen
- All CodesDokument28 SeitenAll CodeskarrarNoch keine Bewertungen
- Module 5Dokument73 SeitenModule 5JyothsnaNoch keine Bewertungen
- Iot1 5Dokument5 SeitenIot1 5btmsNoch keine Bewertungen
- Final CodeDokument4 SeitenFinal Codeprivate demonNoch keine Bewertungen
- Mikrokontroller ArduinorariefDokument101 SeitenMikrokontroller ArduinorariefDio Izqhaq Risky SasongkoNoch keine Bewertungen
- Iot6 10Dokument8 SeitenIot6 10btmsNoch keine Bewertungen
- Drone Hacker 123Dokument13 SeitenDrone Hacker 123Anonymous 3yqNzCxtTzNoch keine Bewertungen
- ProjectcodeDokument3 SeitenProjectcodeRahul YadavNoch keine Bewertungen
- Motor CC Cu Driver 1Dokument4 SeitenMotor CC Cu Driver 1viviNoch keine Bewertungen
- Arduino ProjectDokument13 SeitenArduino ProjectIvy BacolonganNoch keine Bewertungen
- You Can Find Circuit Diagram and Source Code On AppDokument9 SeitenYou Can Find Circuit Diagram and Source Code On AppMinh TrầnNoch keine Bewertungen
- Module 5Dokument73 SeitenModule 5Gr RanjereNoch keine Bewertungen
- ATAL Tinkering Lab PracticalDokument6 SeitenATAL Tinkering Lab PracticalTECH HYAKUNoch keine Bewertungen
- TP 13Dokument3 SeitenTP 13Gianluca BaizaNoch keine Bewertungen
- The Ultrasonic SensorDokument14 SeitenThe Ultrasonic SensorAdalberto Sharpley100% (1)
- New Text DocumentDokument2 SeitenNew Text DocumentMahmoud ElmohamdyNoch keine Bewertungen
- 006 - Arduino (Simulation-1)Dokument18 Seiten006 - Arduino (Simulation-1)ImranNoch keine Bewertungen
- ModulfinalDokument2 SeitenModulfinalYopi HanjoyoNoch keine Bewertungen
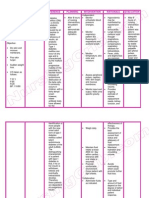
- Nursing Care Plan Diabetes Mellitus Type 1Dokument2 SeitenNursing Care Plan Diabetes Mellitus Type 1deric85% (46)
- Plasterboard FyrchekDokument4 SeitenPlasterboard FyrchekAlex ZecevicNoch keine Bewertungen
- Pro Con ChartDokument3 SeitenPro Con Chartapi-461614875Noch keine Bewertungen
- Introduction To Hydraulic System in The Construction Machinery - Copy ALIDokument2 SeitenIntroduction To Hydraulic System in The Construction Machinery - Copy ALImahadNoch keine Bewertungen
- Chapter - 01 Geography The Earth in The Solar SystemDokument10 SeitenChapter - 01 Geography The Earth in The Solar SystemKarsin ManochaNoch keine Bewertungen
- Lesson 2.4Dokument8 SeitenLesson 2.4Tobi TobiasNoch keine Bewertungen
- 5G, 4G, Vonr Crash Course Complete Log AnaylsisDokument11 Seiten5G, 4G, Vonr Crash Course Complete Log AnaylsisJavier GonzalesNoch keine Bewertungen
- Free DMAIC Checklist Template Excel DownloadDokument5 SeitenFree DMAIC Checklist Template Excel DownloadErik Leonel LucianoNoch keine Bewertungen
- Installing Go Language in UbuntuDokument3 SeitenInstalling Go Language in UbuntupanahbiruNoch keine Bewertungen
- Transformational and Charismatic Leadership: The Road Ahead 10th Anniversary EditionDokument32 SeitenTransformational and Charismatic Leadership: The Road Ahead 10th Anniversary Editionfisaac333085Noch keine Bewertungen
- Gender Inequality and Its Impact On Mental HealthDokument20 SeitenGender Inequality and Its Impact On Mental Healthbanipreet kaurNoch keine Bewertungen
- Acute Conditions of The NewbornDokument46 SeitenAcute Conditions of The NewbornCamille Joy BaliliNoch keine Bewertungen
- Apspdcl PDFDokument21 SeitenApspdcl PDFK.sanjeev KumarNoch keine Bewertungen
- Cot 4 Mapeh (Health)Dokument15 SeitenCot 4 Mapeh (Health)RELYN LUCIDONoch keine Bewertungen
- North Rig 4Dokument1 SeiteNorth Rig 4avefenix666Noch keine Bewertungen
- Study of Noise Mapping at Moolchand Road Phargang New DelhiDokument10 SeitenStudy of Noise Mapping at Moolchand Road Phargang New DelhiEditor IJTSRDNoch keine Bewertungen
- 6 1 Maxima and MinimaDokument10 Seiten6 1 Maxima and MinimaSebastian GarciaNoch keine Bewertungen
- Unit 9 TelephoningDokument14 SeitenUnit 9 TelephoningDaniela DanilovNoch keine Bewertungen
- Defining Who Is A Volunteer ConceptualDokument21 SeitenDefining Who Is A Volunteer ConceptualYosep Trisaputro WahyuNoch keine Bewertungen
- Linguistic LandscapeDokument11 SeitenLinguistic LandscapeZara NurNoch keine Bewertungen
- Ssi-199-22 D Vikran Dolphin Rev.1Dokument2 SeitenSsi-199-22 D Vikran Dolphin Rev.1ANGEL ANTONIO GUTIERREZ CONTRERASNoch keine Bewertungen
- Fundamentals of Logistics XI - 2023Dokument45 SeitenFundamentals of Logistics XI - 2023saiyaNoch keine Bewertungen
- Python Versus Matlab: Examples in Civil EngineeringDokument32 SeitenPython Versus Matlab: Examples in Civil EngineeringNiranjanAryan100% (1)
- Emergency Floatation Helicoptero PDFDokument14 SeitenEmergency Floatation Helicoptero PDFterrywhizardhotmail.com The Best Of The Best.Noch keine Bewertungen
- VukcevicEtAl GhostFluidMethodInPolyhedralFV AnnotatedDokument19 SeitenVukcevicEtAl GhostFluidMethodInPolyhedralFV AnnotatedputhenkulamNoch keine Bewertungen
- WB-Mech 120 Ch05 ModalDokument16 SeitenWB-Mech 120 Ch05 ModalhebiyongNoch keine Bewertungen
- Salik Sa Mga Estudyante NG Hindi Wastong Pagsuot NG Uniporme NG Senior High School Sa Paaralang Ama Computer College Fairview CampusDokument1 SeiteSalik Sa Mga Estudyante NG Hindi Wastong Pagsuot NG Uniporme NG Senior High School Sa Paaralang Ama Computer College Fairview CampusIsrael ManansalaNoch keine Bewertungen
- The Mutant Epoch Mature Adult Content Mutations v1Dokument4 SeitenThe Mutant Epoch Mature Adult Content Mutations v1Joshua GibsonNoch keine Bewertungen
- New Admission Form Short CourseDokument4 SeitenNew Admission Form Short CourseSyed badshahNoch keine Bewertungen
- Report Palazzetto Croci SpreadsDokument73 SeitenReport Palazzetto Croci SpreadsUntaru EduardNoch keine Bewertungen