Das könnte Ihnen auch gefallen
- SCI 121 Disaster Readiness and Risk ReductionDokument163 SeitenSCI 121 Disaster Readiness and Risk ReductionLEONIEVEVE L LIMBAGANoch keine Bewertungen
- Text That Girl Cheat Sheet NewDokument25 SeitenText That Girl Cheat Sheet NewfhgfghgfhNoch keine Bewertungen
- Zapanta v. COMELECDokument3 SeitenZapanta v. COMELECnrpostreNoch keine Bewertungen
- Manual MIB 303S-13/33Dokument58 SeitenManual MIB 303S-13/33Daniel Machado100% (1)
- HRM OmantelDokument8 SeitenHRM OmantelSonia Braham100% (1)
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesVon EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesBewertung: 1.5 von 5 Sternen1.5/5 (2)
- Autoclave 2Dokument52 SeitenAutoclave 2SILVANA ELIZABETH ROMO ALBUJANoch keine Bewertungen
- Order To Cash Cycle Group 1Dokument4 SeitenOrder To Cash Cycle Group 1AswinAniNoch keine Bewertungen
- L4 1 LTIsys AnalysisDokument11 SeitenL4 1 LTIsys AnalysisMohd Shadab AlamNoch keine Bewertungen
- SoluciónDokument3 SeitenSoluciónMefisNoch keine Bewertungen
- EE322M Quiz-1 SolutionDokument6 SeitenEE322M Quiz-1 SolutionshubhamNoch keine Bewertungen
- Examen Final: Dar Io Quino Ramos, Willy Estrada Vargas December 13, 2015Dokument14 SeitenExamen Final: Dar Io Quino Ramos, Willy Estrada Vargas December 13, 2015beni010359Noch keine Bewertungen
- IIT - PCM-2003 With Solutions PDFDokument32 SeitenIIT - PCM-2003 With Solutions PDFShubham KumarNoch keine Bewertungen
- DSP1 - Practice Homework With SolutionsDokument9 SeitenDSP1 - Practice Homework With Solutionsdania alamenNoch keine Bewertungen
- Where, Is A Complex Exponential Magnitude & Angle: X (Z) X N ZDokument26 SeitenWhere, Is A Complex Exponential Magnitude & Angle: X (Z) X N Zanil kadleNoch keine Bewertungen
- Institute of Electrical and Electronic EngineeringDokument48 SeitenInstitute of Electrical and Electronic EngineeringКдйікі КциNoch keine Bewertungen
- A. B. C. Ans.:: Module 3: Analytical Tools Tutorials (Note: Show All Workings and Explanations Clearly)Dokument4 SeitenA. B. C. Ans.:: Module 3: Analytical Tools Tutorials (Note: Show All Workings and Explanations Clearly)Uchechi Chioma UgoNoch keine Bewertungen
- Z TableDokument2 SeitenZ TablembienkNoch keine Bewertungen
- Practice Questions Lecture 3 - SOLUTIONDokument4 SeitenPractice Questions Lecture 3 - SOLUTIONhumairamubarak2001Noch keine Bewertungen
- Digital Signal Processing - Week5 Quiz Solutions: June 15, 2018Dokument6 SeitenDigital Signal Processing - Week5 Quiz Solutions: June 15, 2018bita younesianNoch keine Bewertungen
- Chap 2Dokument6 SeitenChap 2김민성Noch keine Bewertungen
- Digital Signal Processing: Z TransformDokument39 SeitenDigital Signal Processing: Z TransformAbdul HadiNoch keine Bewertungen
- Problem Set 6: X (N) Z, If It ExistsDokument11 SeitenProblem Set 6: X (N) Z, If It ExistsnNoch keine Bewertungen
- HW 5Dokument1 SeiteHW 5dream testNoch keine Bewertungen
- Normal DistributionDokument4 SeitenNormal DistributiondidiaodeqqNoch keine Bewertungen
- Fisier 11 enDokument5 SeitenFisier 11 enFleur_de_LuneNoch keine Bewertungen
- Fisier 11Dokument5 SeitenFisier 11Fleur_de_LuneNoch keine Bewertungen
- G14FOS (Exam 2) Solutions 2013/14Dokument5 SeitenG14FOS (Exam 2) Solutions 2013/14meettoavi059Noch keine Bewertungen
- Rison Siregar (1615031060) + 1 3 Z +, Tentukan Nilai X (N) !: Z +2 Z Z Z X e X (Z) Z +2 Z Z Z Z eDokument3 SeitenRison Siregar (1615031060) + 1 3 Z +, Tentukan Nilai X (N) !: Z +2 Z Z Z X e X (Z) Z +2 Z Z Z Z eRison SiregarNoch keine Bewertungen
- Unit Iv-1Dokument12 SeitenUnit Iv-1dr.omprakash.itNoch keine Bewertungen
- Exercises 4 With SolutionsDokument6 SeitenExercises 4 With Solutionsquanmh16082003Noch keine Bewertungen
- Topic13 Inversion of Z TransformDokument6 SeitenTopic13 Inversion of Z TransformAkshatNoch keine Bewertungen
- Clase31 Señales.28septiembreDokument2 SeitenClase31 Señales.28septiembrekaren juliana rodriguez guerraNoch keine Bewertungen
- Chapter Five Z-Transform and Applications 5.1 Introduction To Z-TransformDokument12 SeitenChapter Five Z-Transform and Applications 5.1 Introduction To Z-Transformtesfay welayNoch keine Bewertungen
- Calculating The Inverse Z-TransformDokument10 SeitenCalculating The Inverse Z-TransformJPR EEENoch keine Bewertungen
- APPM 4360/5360 Homework Assignment #5 Solutions Spring 2019: Ǫ/m - Then, For All Z D and All N N (Ǫ) N (Ǫ ǪDokument7 SeitenAPPM 4360/5360 Homework Assignment #5 Solutions Spring 2019: Ǫ/m - Then, For All Z D and All N N (Ǫ) N (Ǫ ǪJulio RacineNoch keine Bewertungen
- Eee5502 DiscreteTransformsDokument4 SeitenEee5502 DiscreteTransformsAhmed EidNoch keine Bewertungen
- 5 L L EC533: Digital Signal Processing: DFT and FFTDokument20 Seiten5 L L EC533: Digital Signal Processing: DFT and FFTDalia Abou El MaatyNoch keine Bewertungen
- Solution To The Problem Set 6: Ehsan Karamad March 12, 2013Dokument5 SeitenSolution To The Problem Set 6: Ehsan Karamad March 12, 2013RAPETI SAI KUMAR (N160490)Noch keine Bewertungen
- EP 5511 - Lecture 02Dokument32 SeitenEP 5511 - Lecture 02Solomon Tadesse AthlawNoch keine Bewertungen
- Uconn ECE6439 Final 2015Dokument3 SeitenUconn ECE6439 Final 2015Nemo OutisNoch keine Bewertungen
- The Z-TransformDokument24 SeitenThe Z-TransformdhinojahimeshNoch keine Bewertungen
- Book Answers ch4Dokument3 SeitenBook Answers ch4Abdul AlsomaliNoch keine Bewertungen
- NPTEL Week 4Dokument15 SeitenNPTEL Week 4GAURAV RATHORENoch keine Bewertungen
- Digital Signal Processing by Oppenheim Home WorksDokument78 SeitenDigital Signal Processing by Oppenheim Home Workslankyrck67% (3)
- Math3 - Z-Transform Additional ProblemDokument8 SeitenMath3 - Z-Transform Additional Problempablo chanNoch keine Bewertungen
- Cvpde - Compressed TheoryDokument36 SeitenCvpde - Compressed TheoryChavda Rohit0% (1)
- B - Korean JDokument8 SeitenB - Korean JWali Mohammad ShahNoch keine Bewertungen
- Convergence Region Questions and Answers - SanfoundryDokument11 SeitenConvergence Region Questions and Answers - SanfoundrykshambelmekuyeNoch keine Bewertungen
- ZT4 Appl OnlinePPTDokument20 SeitenZT4 Appl OnlinePPTThato Will MongaleNoch keine Bewertungen
- ECE 5650/4650 Tables For Exam I: Sequence Sum FormulasDokument3 SeitenECE 5650/4650 Tables For Exam I: Sequence Sum Formulasue06037Noch keine Bewertungen
- PM 352 Assignment 2 SolutionsDokument3 SeitenPM 352 Assignment 2 SolutionsErRobert ChNoch keine Bewertungen
- NoteDokument37 SeitenNoteHaryanvi ChhoraNoch keine Bewertungen
- Solve ExamDokument6 SeitenSolve ExamyNoch keine Bewertungen
- FORMULA SHEET and The TABLESDokument10 SeitenFORMULA SHEET and The TABLESWiSeVirGoNoch keine Bewertungen
- MATHEMATICS 2B (MATH248) 2021 Tutorial 11 Complex Analysis Text ProblemsDokument2 SeitenMATHEMATICS 2B (MATH248) 2021 Tutorial 11 Complex Analysis Text ProblemsMbuso MadidaNoch keine Bewertungen
- EE5130: Digital Signal ProcessingDokument2 SeitenEE5130: Digital Signal ProcessingSHUBHAM ANAND VERMA EE20M540Noch keine Bewertungen
- Solutions Ch10Dokument13 SeitenSolutions Ch10mustafa arkanNoch keine Bewertungen
- Supplementary SummerDokument7 SeitenSupplementary Summer张琳Noch keine Bewertungen
- Be Computer Engineering Semester 3 2019 December Applied Mathematics III CbcgsDokument15 SeitenBe Computer Engineering Semester 3 2019 December Applied Mathematics III CbcgsMadhura KanseNoch keine Bewertungen
- DSP AssignmentDokument81 SeitenDSP AssignmentBot 150% (2)
- 1T4 Basic MathematicsDokument15 Seiten1T4 Basic MathematicsZenPhiNoch keine Bewertungen
- Z-Transform and ApplicationsDokument93 SeitenZ-Transform and ApplicationsSartremolo NietzchevereNoch keine Bewertungen
- Chapter 5. Bayesian Statistics (II)Dokument30 SeitenChapter 5. Bayesian Statistics (II)freeeebooksNoch keine Bewertungen
- Class Test 2018-19: Electronics EngineeringDokument9 SeitenClass Test 2018-19: Electronics EngineeringAbhishek AgrawalNoch keine Bewertungen
- Solu of Assignment 10Dokument5 SeitenSolu of Assignment 10dontstopmeNoch keine Bewertungen
- Renvoi in Private International LawDokument4 SeitenRenvoi in Private International LawAgav VithanNoch keine Bewertungen
- 1634 - Gondola Head Super - Structure and Side Wall - ENDokument8 Seiten1634 - Gondola Head Super - Structure and Side Wall - ENmohammadNoch keine Bewertungen
- God Save The Queen Score PDFDokument3 SeitenGod Save The Queen Score PDFDarion0% (2)
- Aug 2020 Builders Line Tamil MonthlyDokument48 SeitenAug 2020 Builders Line Tamil MonthlyBuildersLineMonthlyNoch keine Bewertungen
- TC 9-237 Welding 1993Dokument680 SeitenTC 9-237 Welding 1993enricoNoch keine Bewertungen
- Add New Question (Download - PHP? SC Mecon&id 50911)Dokument9 SeitenAdd New Question (Download - PHP? SC Mecon&id 50911)AnbarasanNoch keine Bewertungen
- NOS 65-200-90x60-30KWD PDFDokument2 SeitenNOS 65-200-90x60-30KWD PDFDao The ThangNoch keine Bewertungen
- Management and Entrepreneurship Important QuestionsDokument1 SeiteManagement and Entrepreneurship Important QuestionslambazNoch keine Bewertungen
- Intel Server RoadmapDokument19 SeitenIntel Server Roadmapjinish.K.GNoch keine Bewertungen
- Far160 Pyq Feb2023Dokument8 SeitenFar160 Pyq Feb2023nazzyusoffNoch keine Bewertungen
- University of Nottingham Department of Architecture and Built EnvironmentDokument43 SeitenUniversity of Nottingham Department of Architecture and Built EnvironmentDaniahNoch keine Bewertungen
- Hardening'-Australian For Transformation: A Monograph by MAJ David J. Wainwright Australian Regular ArmyDokument89 SeitenHardening'-Australian For Transformation: A Monograph by MAJ David J. Wainwright Australian Regular ArmyJet VissanuNoch keine Bewertungen
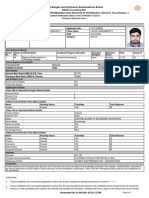
- West Bengal Joint Entrance Examinations Board: Provisional Admission LetterDokument2 SeitenWest Bengal Joint Entrance Examinations Board: Provisional Admission Lettertapas chakrabortyNoch keine Bewertungen
- Integrated Recycling Systems: Harris Complete PackageDokument4 SeitenIntegrated Recycling Systems: Harris Complete PackageNicolás Toro ValenzuelaNoch keine Bewertungen
- 02Dokument257 Seiten02shaney navoaNoch keine Bewertungen
- Item No. 6 Diary No 6856 2024 ConsolidatedDokument223 SeitenItem No. 6 Diary No 6856 2024 Consolidatedisha NagpalNoch keine Bewertungen
- PraxiarDokument8 SeitenPraxiara_roy003Noch keine Bewertungen
- Lecture 3 - Marriage and Marriage PaymentsDokument11 SeitenLecture 3 - Marriage and Marriage PaymentsGrace MguniNoch keine Bewertungen
- Deep Sea Electronics PLC: DSE103 MKII Speed Switch PC Configuration Suite LiteDokument14 SeitenDeep Sea Electronics PLC: DSE103 MKII Speed Switch PC Configuration Suite LiteMostafa ShannaNoch keine Bewertungen
- CV Najim Square Pharma 4 Years ExperienceDokument2 SeitenCV Najim Square Pharma 4 Years ExperienceDelwarNoch keine Bewertungen
- Chapter 9 Audit SamplingDokument47 SeitenChapter 9 Audit SamplingYenelyn Apistar CambarijanNoch keine Bewertungen
- Southport Minerals CombinedDokument20 SeitenSouthport Minerals CombinedEshesh GuptaNoch keine Bewertungen
- AMCHAM Press ReleaseDokument1 SeiteAMCHAM Press ReleaseAnonymous FnM14a0Noch keine Bewertungen