Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Radial Distribution Function For Argon Calculations From Thermodynamic Properties andDokument11 SeitenRadial Distribution Function For Argon Calculations From Thermodynamic Properties andrafelNoch keine Bewertungen
- 4 Hydrates & Hydrate PreventionDokument26 Seiten4 Hydrates & Hydrate PreventionWael Badri100% (1)
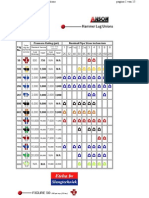
- Hamerlug Unions (Anson)Dokument15 SeitenHamerlug Unions (Anson)Leonardo ViannaNoch keine Bewertungen
- Shrinking Core ModelDokument10 SeitenShrinking Core ModelscribdNoch keine Bewertungen
- Lecture 3 - Curves in Space and Their TangentDokument38 SeitenLecture 3 - Curves in Space and Their TangentNURUL YAHSIFAH SYQELLA BINTI YAHYA BK21110100Noch keine Bewertungen
- College Entrance Exam Practice Test 1Dokument4 SeitenCollege Entrance Exam Practice Test 1Jenny Rose S. Basa, LPTNoch keine Bewertungen
- DKD-R - 6-1 2014Dokument39 SeitenDKD-R - 6-1 2014japofff100% (1)
- View Interpolation For Image Synthesis: Shenchang Eric Chen, Lance Williams Apple Computer, IncDokument10 SeitenView Interpolation For Image Synthesis: Shenchang Eric Chen, Lance Williams Apple Computer, IncPiyush JainNoch keine Bewertungen
- Paper 89672Dokument16 SeitenPaper 89672RUDHRA DHANASEKARNoch keine Bewertungen
- Cambridge IGCSE (9-1) : Physics 0972/11Dokument20 SeitenCambridge IGCSE (9-1) : Physics 0972/11michael nanlohyNoch keine Bewertungen
- Safty Switch 3TK2825Dokument46 SeitenSafty Switch 3TK2825Amir KeikavoosnejadNoch keine Bewertungen
- TRIAL STPM Mathematics M 2 (SABAH) SMK Tinggi KotaKinabaluDokument12 SeitenTRIAL STPM Mathematics M 2 (SABAH) SMK Tinggi KotaKinabaluSKNoch keine Bewertungen
- Soil Science: Classification of PedologyDokument24 SeitenSoil Science: Classification of Pedologyekush amar100% (1)
- Physics of SoundDokument33 SeitenPhysics of SoundijahsmkutNoch keine Bewertungen
- New Cosmos PDFDokument32 SeitenNew Cosmos PDFIshan RanganathNoch keine Bewertungen
- Mechanics of Solids Lab ManualDokument47 SeitenMechanics of Solids Lab Manualravi03319100% (1)
- Se Single Phase Inverter DatasheetDokument2 SeitenSe Single Phase Inverter DatasheetsabrahimaNoch keine Bewertungen
- RT Procedure GeneralDokument18 SeitenRT Procedure GeneralvsnaiduqcNoch keine Bewertungen
- Effect of Specimen Thickness and Stress Ratio On Fatigue Crack Growth After A Single Overload Cycle On Structural SteelDokument8 SeitenEffect of Specimen Thickness and Stress Ratio On Fatigue Crack Growth After A Single Overload Cycle On Structural SteelKamal MankariNoch keine Bewertungen
- Anionic PolymerisationDokument3 SeitenAnionic PolymerisationChayanAnandNoch keine Bewertungen
- Manual PT90Dokument68 SeitenManual PT90Youssef Sarkis MobarakNoch keine Bewertungen
- Neodymium MagnetDokument42 SeitenNeodymium MagnetpraveenNoch keine Bewertungen
- ST-130 - Manual PDFDokument27 SeitenST-130 - Manual PDFJean TorreblancaNoch keine Bewertungen
- Building Envelope Design Guide - Curtain Walls - Whole Building Design GuideDokument8 SeitenBuilding Envelope Design Guide - Curtain Walls - Whole Building Design GuideAyman_Elmasry_9107Noch keine Bewertungen
- PVC& CPVC SCH 80 Technical CatalogueDokument49 SeitenPVC& CPVC SCH 80 Technical CataloguekailashNoch keine Bewertungen
- Force Relations and Dynamics of Cutting Knife in A Vertical Disc Mobile Wood Chipper - Leonardo El J Pract TechnolDokument14 SeitenForce Relations and Dynamics of Cutting Knife in A Vertical Disc Mobile Wood Chipper - Leonardo El J Pract TechnolNguyenHuanNoch keine Bewertungen
- Mark Scheme For Papers 1 and 2: Science TestsDokument60 SeitenMark Scheme For Papers 1 and 2: Science TestsDavid MagasinNoch keine Bewertungen
- PV Elite Tips and TricksDokument50 SeitenPV Elite Tips and TricksHoracio Rodriguez80% (5)
- Prosprod I Casting Process (2) - Part2 PDFDokument36 SeitenProsprod I Casting Process (2) - Part2 PDFPandu WibowoNoch keine Bewertungen