Das könnte Ihnen auch gefallen
- Proyecciones OrtogonalesDokument16 SeitenProyecciones OrtogonalesRomero MarielenaNoch keine Bewertungen
- Cinematica Unidad 3 (Unefa)Dokument7 SeitenCinematica Unidad 3 (Unefa)ELIEZER ROJAS100% (1)
- Trabajo Nuevo Dibujo T.Dokument20 SeitenTrabajo Nuevo Dibujo T.Viclic100100% (6)
- Relacion Entre Orden y CarreraDokument1 SeiteRelacion Entre Orden y CarreraFelix Vicente Carrillo SantanaNoch keine Bewertungen
- Rectas-Planos y Curvas en El EspacioDokument8 SeitenRectas-Planos y Curvas en El EspacioedesmitNoch keine Bewertungen
- Diseño Del Sistema Del Microcomputador PDFDokument9 SeitenDiseño Del Sistema Del Microcomputador PDFclaudia martinezNoch keine Bewertungen
- Áreas de Figuras Planas en Coordenadas PolaresDokument25 SeitenÁreas de Figuras Planas en Coordenadas PolaresMiguel Ángel Rodríguez RomuchoNoch keine Bewertungen
- Angulo Formado Por Dos Rectas en El EspacioDokument4 SeitenAngulo Formado Por Dos Rectas en El EspacioJavierNoch keine Bewertungen
- Concepto Estratégico para La Defensa Integral de La NaciónDokument16 SeitenConcepto Estratégico para La Defensa Integral de La NaciónAlejandro CarrasqueroNoch keine Bewertungen
- Gabriel Gimenez, 5to Trabajo Din 5 Geoestratégica NacionalDokument12 SeitenGabriel Gimenez, 5to Trabajo Din 5 Geoestratégica NacionalGabriel GimenezNoch keine Bewertungen
- Concepción de La Lucha No ArmadaDokument7 SeitenConcepción de La Lucha No ArmadaFRANCISCO GONZÁLEZNoch keine Bewertungen
- Manejo Efectivo Del TiempoDokument9 SeitenManejo Efectivo Del TiempoAnderson CamposNoch keine Bewertungen
- Lugares Geometricos en El PlanoDokument11 SeitenLugares Geometricos en El PlanoEstefani Yovera100% (1)
- Ingenieria Civil Dfensa IntegralDokument3 SeitenIngenieria Civil Dfensa Integralthe consentido0% (1)
- Lucha No ArmadaDokument8 SeitenLucha No ArmadaVíctor José Yánez50% (4)
- Trabajo Unidad 1 y 2 DefensaDokument20 SeitenTrabajo Unidad 1 y 2 DefensaNeiraCariasDanielNoch keine Bewertungen
- Unefa - PROYECCIONES ORTOGONALESDokument12 SeitenUnefa - PROYECCIONES ORTOGONALESwill9253Noch keine Bewertungen
- Trabajo Unidad 4Dokument29 SeitenTrabajo Unidad 4Maria Saa GarciaNoch keine Bewertungen
- Normalizacion en El Dibujo TécnicoDokument19 SeitenNormalizacion en El Dibujo TécnicoAniuska AponteNoch keine Bewertungen
- Din - Civico MilitarDokument100 SeitenDin - Civico MilitarJairubis0% (1)
- Defensa Integral ViDokument6 SeitenDefensa Integral Vidarvis100% (2)
- Resumen Capitulo 4Dokument2 SeitenResumen Capitulo 4Dixon IglesiasNoch keine Bewertungen
- Trabajo 2.estado de Emergencia y Estado de ExcepciónDokument17 SeitenTrabajo 2.estado de Emergencia y Estado de ExcepciónALEXANDER ARCIANoch keine Bewertungen
- Guía de Geometría Analítica Unidad IVDokument9 SeitenGuía de Geometría Analítica Unidad IVReina MaitaNoch keine Bewertungen
- Temas Previstos Por El CeoDokument5 SeitenTemas Previstos Por El CeoVictorNoch keine Bewertungen
- Composición Del Comité de Dirección de La Defensa IntegralDokument8 SeitenComposición Del Comité de Dirección de La Defensa IntegraldanielNoch keine Bewertungen
- Segmentos en El Plano CartesianoDokument4 SeitenSegmentos en El Plano Cartesianoelrechoncito 734Noch keine Bewertungen
- Unidad III - Sistema Gestin ABRAES inDokument11 SeitenUnidad III - Sistema Gestin ABRAES inedoinho80% (5)
- Características y Finalidad de La Geopolítica Económica y EstrategiaDokument5 SeitenCaracterísticas y Finalidad de La Geopolítica Económica y EstrategiaBrian Brown100% (1)
- Trabajo de Dibujo #4Dokument9 SeitenTrabajo de Dibujo #4judiangely100% (2)
- Matematica 1.funciones - Barbara Ochoa - Ing Civil - UnefaDokument20 SeitenMatematica 1.funciones - Barbara Ochoa - Ing Civil - UnefaBarbara Ochoa YegresNoch keine Bewertungen
- Dibujo Tecnico UnefaDokument28 SeitenDibujo Tecnico UnefaYsrrael centenoNoch keine Bewertungen
- Unidad V INTRODUCCION AL ELECTROMAGNETISMODokument8 SeitenUnidad V INTRODUCCION AL ELECTROMAGNETISMOcarlos marquezNoch keine Bewertungen
- Din Vi Estado de EmergenciaDokument8 SeitenDin Vi Estado de EmergenciaInvierno PlNoch keine Bewertungen
- Unidad 1 Genesis y Evolucion de La Sociedad HumanaDokument30 SeitenUnidad 1 Genesis y Evolucion de La Sociedad HumanaRaul Carrascal100% (1)
- Historia de La Región y Su Importancia en Venezuela)Dokument6 SeitenHistoria de La Región y Su Importancia en Venezuela)Wilkie SharonNoch keine Bewertungen
- Estado de Emergencia, Estado de ExcepciónDokument6 SeitenEstado de Emergencia, Estado de ExcepciónEnmanuel ColinaNoch keine Bewertungen
- CORTES Y SECCIO-WPS OfficeDokument14 SeitenCORTES Y SECCIO-WPS OfficeTachira LoTengo0% (1)
- MongeDokument6 SeitenMongearthax1867% (3)
- MATEMATICADokument16 SeitenMATEMATICAyajaira ruizNoch keine Bewertungen
- Contenido Programatico Defensa Integral.Dokument7 SeitenContenido Programatico Defensa Integral.jhoamuNoch keine Bewertungen
- La Proyección AxonométricaDokument12 SeitenLa Proyección AxonométricaRomero MarielenaNoch keine Bewertungen
- Aspectos Generales Acerca de La Concepcion de La Lucha No ArmadaDokument5 SeitenAspectos Generales Acerca de La Concepcion de La Lucha No ArmadaHéctor BolívarNoch keine Bewertungen
- Defensa Integral 8vo SemestreDokument16 SeitenDefensa Integral 8vo SemestreGenesis DiazNoch keine Bewertungen
- PDF Papel Jugado Por Las Masas Populares DuranteDokument3 SeitenPDF Papel Jugado Por Las Masas Populares DuranteConan EliezerNoch keine Bewertungen
- Guía de Resolución de Problemas Matemáticas III UnefaDokument14 SeitenGuía de Resolución de Problemas Matemáticas III UnefajoseNoch keine Bewertungen
- Interrelación de Los Órganos de Seguridad de La Defensa Integral y La Lucha No Armada Con La Carrera CursanteDokument1 SeiteInterrelación de Los Órganos de Seguridad de La Defensa Integral y La Lucha No Armada Con La Carrera Cursantejesus cholletNoch keine Bewertungen
- UNIDAD4Dokument7 SeitenUNIDAD4Axel Alzuru VargasNoch keine Bewertungen
- Los Tres Viajes de Simón Bolívar A EuropaDokument6 SeitenLos Tres Viajes de Simón Bolívar A EuropainterfrankNoch keine Bewertungen
- Unidad I 8vo Sem. - CONCEPCIÓN DE LA LUCHA NO ARMADADokument14 SeitenUnidad I 8vo Sem. - CONCEPCIÓN DE LA LUCHA NO ARMADAAngel D Sequera ONoch keine Bewertungen
- Trabajo Defensa 2Dokument11 SeitenTrabajo Defensa 2Juan MujicaNoch keine Bewertungen
- Dibujo GeometrcioDokument14 SeitenDibujo GeometrciofelimarNoch keine Bewertungen
- Cultura de Paz y Calidad de VidaDokument3 SeitenCultura de Paz y Calidad de Vidaisa0% (2)
- Investigacion Defensa MiliciaDokument8 SeitenInvestigacion Defensa MiliciaCherwin ChirinosNoch keine Bewertungen
- Unidad II Defensa Integlan VIDokument12 SeitenUnidad II Defensa Integlan VIRodrigo RamirezNoch keine Bewertungen
- Gerencia Comunitaria UNEFADokument8 SeitenGerencia Comunitaria UNEFAEduardo Carrasquel Stekelenburg100% (1)
- 10 Diferencias Entre La Lucha Armada y La Lucha No Armada, Por Luis LayaDokument4 Seiten10 Diferencias Entre La Lucha Armada y La Lucha No Armada, Por Luis LayaLuis BlancoNoch keine Bewertungen
- Unidad IIIDokument20 SeitenUnidad IIIManu Arh100% (1)
- GeometriaDokument7 SeitenGeometriapauco1998Noch keine Bewertungen
- Geometria Analitica y Descriptiva - Paralelismo y PerpendicularidadDokument15 SeitenGeometria Analitica y Descriptiva - Paralelismo y PerpendicularidadMaria de los ÁngelesNoch keine Bewertungen
- Embarazo Psicológico en PerrasDokument5 SeitenEmbarazo Psicológico en Perrasluis sanchezNoch keine Bewertungen
- Definición de Cableado Estructurado - Qué Es, Significado y ConceptoDokument3 SeitenDefinición de Cableado Estructurado - Qué Es, Significado y Conceptoluis sanchezNoch keine Bewertungen
- Sistemas TroncalizadosDokument14 SeitenSistemas Troncalizadosluis sanchezNoch keine Bewertungen
- Definición de Televisión - Qué Es, Significado y ConceptoDokument3 SeitenDefinición de Televisión - Qué Es, Significado y Conceptoluis sanchezNoch keine Bewertungen
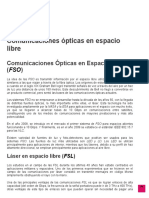
- Comunicaciones Ópticas en Espacio Libre - EsOpoDokument4 SeitenComunicaciones Ópticas en Espacio Libre - EsOpoluis sanchezNoch keine Bewertungen
- VUELVE A MI Lorena J Vasquez ChauraDokument162 SeitenVUELVE A MI Lorena J Vasquez Chauraluis sanchezNoch keine Bewertungen
- Verbos para Objetivos Generales y EspecificosDokument19 SeitenVerbos para Objetivos Generales y Especificosluis sanchezNoch keine Bewertungen
- Función Escalón de HeavisideDokument5 SeitenFunción Escalón de Heavisideluis sanchezNoch keine Bewertungen
- Como Estudiar Pensum y RecordDokument6 SeitenComo Estudiar Pensum y Recordluis sanchezNoch keine Bewertungen
- Derivada de Una Potencia - Superprof PDFDokument3 SeitenDerivada de Una Potencia - Superprof PDFluis sanchezNoch keine Bewertungen
- Significado de Desarrollo Sustentable (Qué Es, Concepto y Definición) - SignificadosDokument2 SeitenSignificado de Desarrollo Sustentable (Qué Es, Concepto y Definición) - Significadosluis sanchezNoch keine Bewertungen
- Senales ElementalesDokument30 SeitenSenales Elementalesluis sanchezNoch keine Bewertungen
- Fundamentos de Programación - Tipos de Datos EstructuradosDokument6 SeitenFundamentos de Programación - Tipos de Datos Estructuradosluis sanchezNoch keine Bewertungen
- Unidad 5. SeminarioDokument3 SeitenUnidad 5. Seminarioluis sanchezNoch keine Bewertungen
- Ministerio Del Poder Popular para La Comunicación y La InformaciónDokument3 SeitenMinisterio Del Poder Popular para La Comunicación y La Informaciónluis sanchezNoch keine Bewertungen
- MacArthur. Medidas Comparativos Población ColombianaDokument14 SeitenMacArthur. Medidas Comparativos Población ColombianaMilena GarciaNoch keine Bewertungen
- ConjuncionesDokument3 SeitenConjuncionesGuadalupe Pezantes BellezaNoch keine Bewertungen
- CaratulaDokument92 SeitenCaratulamilon abrahamNoch keine Bewertungen
- CUESTIONARIO 2 EdafoDokument4 SeitenCUESTIONARIO 2 EdafoKATHERINNoch keine Bewertungen
- Exact BT X Plus F e P DPCG000735A 01 2018Dokument8 SeitenExact BT X Plus F e P DPCG000735A 01 2018Gabriell FirmoNoch keine Bewertungen
- Prueba Mac El Microbio DesconocidoDokument6 SeitenPrueba Mac El Microbio DesconocidoGuerty Ibañez CancinoNoch keine Bewertungen
- 67 Pemex SRHRLDokument7 Seiten67 Pemex SRHRLPos Yo YoNoch keine Bewertungen
- Analisis Gerencial de MercadeoDokument24 SeitenAnalisis Gerencial de MercadeoPaty LimaNoch keine Bewertungen
- Guia 35 LenguajeDokument2 SeitenGuia 35 LenguajeCaroline Diane González ReyesNoch keine Bewertungen
- Ontologia SocialDokument3 SeitenOntologia SocialWilmer SuárezNoch keine Bewertungen
- Charlotte Towle, FLORENCE HOLLISDokument3 SeitenCharlotte Towle, FLORENCE HOLLISPAPELERIA PIOLINNoch keine Bewertungen
- AcademiaDokument473 SeitenAcademiafelipeNoch keine Bewertungen
- Presentación MATEMATICA BASICA MONGODBDokument35 SeitenPresentación MATEMATICA BASICA MONGODB20231d215Noch keine Bewertungen
- Cuaderno de Tercero de Eso Educacic3b3n Afectivo SexualDokument50 SeitenCuaderno de Tercero de Eso Educacic3b3n Afectivo Sexualedwin5152Noch keine Bewertungen
- Problema Cantidad de Movimiento ResueltoDokument3 SeitenProblema Cantidad de Movimiento ResueltoevangelinaNoch keine Bewertungen
- Definicion y Formulas de Ratios FinancierosDokument4 SeitenDefinicion y Formulas de Ratios FinancierosVeronica Huaccan GutierrezNoch keine Bewertungen
- Ángel Palerm Historia de La Etnologia-Tylor y Los Profesionales Britanicos Lectura 1Dokument33 SeitenÁngel Palerm Historia de La Etnologia-Tylor y Los Profesionales Britanicos Lectura 1marherreyNoch keine Bewertungen
- ASMR Susurros Meditacion AnsiedadDokument1 SeiteASMR Susurros Meditacion AnsiedadAlejandra GrecoNoch keine Bewertungen
- Informe CinemáticaDokument3 SeitenInforme Cinemáticabrigitte alejandra morales castiblancoNoch keine Bewertungen
- Plan de EmergenciaDokument18 SeitenPlan de EmergenciaLookims BerserkerNoch keine Bewertungen
- Analisis Precios Unitarios Extraordinarios Delg CuauhtemocDokument72 SeitenAnalisis Precios Unitarios Extraordinarios Delg Cuauhtemocpablo sumayaNoch keine Bewertungen
- Dovorcio VoluntarioDokument3 SeitenDovorcio VoluntarioMaria Antonieta Espinosa CAstilloNoch keine Bewertungen
- Cuestionario Derecho NotarialDokument36 SeitenCuestionario Derecho NotarialEdgar Elias Cua TumaxNoch keine Bewertungen
- Plan de Trabajo Inmunizaciones Huayllasp 2022Dokument7 SeitenPlan de Trabajo Inmunizaciones Huayllasp 2022P.S Huayllaspanca67% (6)
- P.S. 012-Pva-Ralli-2023Dokument8 SeitenP.S. 012-Pva-Ralli-2023Alexander SilvaNoch keine Bewertungen
- RE 1124 - 2002 Rótulos Seguridad en CilindrosDokument6 SeitenRE 1124 - 2002 Rótulos Seguridad en Cilindroshuasov4147Noch keine Bewertungen
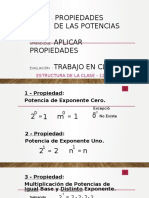
- 03 Propiedades de Las PotenciasDokument21 Seiten03 Propiedades de Las PotenciasDavid Esteban Quezada MieresNoch keine Bewertungen
- 5º Varon y Mujer Misma DignidadDokument1 Seite5º Varon y Mujer Misma DignidadYHAJA MANoch keine Bewertungen
- Amplificadores Operacionales PDFDokument5 SeitenAmplificadores Operacionales PDFDaniel SolisNoch keine Bewertungen
- Historia Del Cemento Linea Del TiempoDokument4 SeitenHistoria Del Cemento Linea Del TiempoRoxana Barbes HernandezNoch keine Bewertungen