Das könnte Ihnen auch gefallen
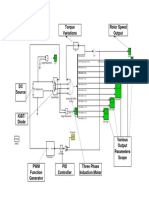
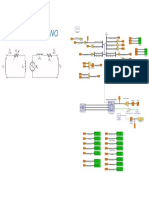
- Torque Variations Rotor Speed Output: Three - Phase Asynchronous MachineDokument1 SeiteTorque Variations Rotor Speed Output: Three - Phase Asynchronous MachineJaved Ahmed LaghariNoch keine Bewertungen
- Lab 3 Field Speed Control of DC Motors: 1. ObjectiveDokument7 SeitenLab 3 Field Speed Control of DC Motors: 1. ObjectiveErgin ÖzdikicioğluNoch keine Bewertungen
- Gearless Mill Drive - Operation and Maintenance: CycloconverterDokument21 SeitenGearless Mill Drive - Operation and Maintenance: CycloconverterIrving Dirzo Carrillo100% (1)
- 2018 PI Exam SolutionDokument9 Seiten2018 PI Exam SolutionAhmed AliNoch keine Bewertungen
- Enric Pardo, Mike Staines, Zhenan Jiang, Neil Glasson, Bob BuckleyDokument1 SeiteEnric Pardo, Mike Staines, Zhenan Jiang, Neil Glasson, Bob BuckleymikeNoch keine Bewertungen
- Motor SincronoDokument1 SeiteMotor Sincronosamuel sedanoNoch keine Bewertungen
- Modelling & S Imulation of BLDC Motor Characterstics: 1999 SpeedDokument1 SeiteModelling & S Imulation of BLDC Motor Characterstics: 1999 SpeedTanmay SuryawanshiNoch keine Bewertungen
- Imc 35 MLD Dep Ee Dat 08 r2Dokument4 SeitenImc 35 MLD Dep Ee Dat 08 r2Electrical RadicalNoch keine Bewertungen
- Half BridgeDokument44 SeitenHalf BridgeVenkatesh ShastryNoch keine Bewertungen
- Sourav Dutta: Dynamic Braking Operation of An Induction Motor Using MatlabDokument4 SeitenSourav Dutta: Dynamic Braking Operation of An Induction Motor Using MatlabSourav DuttaNoch keine Bewertungen
- Power Factor Correction: Current Lagging ReactiveDokument4 SeitenPower Factor Correction: Current Lagging ReactiveZubairAfzalNoch keine Bewertungen
- Ew412 - Ew512Dokument2 SeitenEw412 - Ew512Carlos PosadaNoch keine Bewertungen
- Catalogo Servo 1FK7Dokument6 SeitenCatalogo Servo 1FK7José Manuel GonzálezNoch keine Bewertungen
- Relay Coordination Preliminary Report Draft-BDokument4 SeitenRelay Coordination Preliminary Report Draft-Bramesh1950Noch keine Bewertungen
- Product Catalog & Design Guide: Gas Discharge Tube (GDT) ProductsDokument60 SeitenProduct Catalog & Design Guide: Gas Discharge Tube (GDT) ProductsMisko PiskoNoch keine Bewertungen
- A.01 Ac Motors Operation ConceptsDokument11 SeitenA.01 Ac Motors Operation ConceptsRamez YassaNoch keine Bewertungen
- Em Lab 2Dokument22 SeitenEm Lab 2abhishek kolseNoch keine Bewertungen
- Product Catalog & Design Guide: Gas Discharge Tube (GDT) ProductsDokument76 SeitenProduct Catalog & Design Guide: Gas Discharge Tube (GDT) ProductsSantiago BNoch keine Bewertungen
- Turbine-Less Ducted Fan Jet Engine: Subsonic PropulsionDokument25 SeitenTurbine-Less Ducted Fan Jet Engine: Subsonic PropulsionزهديابوانسNoch keine Bewertungen
- DCMT .AnDokument47 SeitenDCMT .AnastridyoungtheoNoch keine Bewertungen
- CTAN160 - 4-20ma Current Loop ControlDokument3 SeitenCTAN160 - 4-20ma Current Loop ControlSam eagle goodNoch keine Bewertungen
- DC MotorsDokument68 SeitenDC MotorsakshatNoch keine Bewertungen
- Sboa 247Dokument5 SeitenSboa 247Surafel DestawNoch keine Bewertungen
- TI Intro To FOCDokument55 SeitenTI Intro To FOCName24122021Noch keine Bewertungen
- InductionGenerator GridConnectedDokument2 SeitenInductionGenerator GridConnectedtemp tempNoch keine Bewertungen
- Instruction Manual & Observation Book: Clrr10-Applied Electrical and Electronics Engineering LaboratoryDokument9 SeitenInstruction Manual & Observation Book: Clrr10-Applied Electrical and Electronics Engineering LaboratoryAditi PatilNoch keine Bewertungen
- LM555 Single Timer: Features DescriptionDokument14 SeitenLM555 Single Timer: Features DescriptionDanilson GasparNoch keine Bewertungen
- Induction Motor DrivesDokument70 SeitenInduction Motor DrivesAshwin Gopinath80% (5)
- AT33 IND Software Most RecentDokument2 SeitenAT33 IND Software Most RecentENRIQUENoch keine Bewertungen
- AT33 IND Software Most RecentDokument2 SeitenAT33 IND Software Most RecentENRIQUENoch keine Bewertungen
- BUCK DC - 5PAPER - Edited 23.10.25Dokument8 SeitenBUCK DC - 5PAPER - Edited 23.10.25doanminhtien030903Noch keine Bewertungen
- Ecma L1221BR3 PD02 05172016Dokument2 SeitenEcma L1221BR3 PD02 05172016Anil JindalNoch keine Bewertungen
- sjpw-t4 Ds enDokument8 Seitensjpw-t4 Ds enPalinda BandaraNoch keine Bewertungen
- 3827-E10-063 - Modulating Control Valve - EDokument6 Seiten3827-E10-063 - Modulating Control Valve - EMohamed Elsaid El ShallNoch keine Bewertungen
- Generator Operation & ControlDokument21 SeitenGenerator Operation & ControlAsep HermanNoch keine Bewertungen
- BrushlessDC BasicsDokument1 SeiteBrushlessDC BasicsJimNoch keine Bewertungen
- Fsd2u2p14 01 PDFDokument1 SeiteFsd2u2p14 01 PDFPhan AnNoch keine Bewertungen
- Fsd2u2p14 01 PDFDokument1 SeiteFsd2u2p14 01 PDFPhan AnNoch keine Bewertungen
- Full Wave Rectifier: Instruction CircuitDokument1 SeiteFull Wave Rectifier: Instruction CircuitAtharv LokhandeNoch keine Bewertungen
- Speed Control of DC MotorDokument8 SeitenSpeed Control of DC MotorsubhamNoch keine Bewertungen
- Electric Motor Drive PDFDokument20 SeitenElectric Motor Drive PDFMoaz ShafiNoch keine Bewertungen
- Tabela Coordenação Tipo 1 Soft Start SMC50Dokument1 SeiteTabela Coordenação Tipo 1 Soft Start SMC50elclopesNoch keine Bewertungen
- Ee 491 Machine 1Dokument30 SeitenEe 491 Machine 1swagato deyNoch keine Bewertungen
- Acs 01Dokument12 SeitenAcs 01satya prakashNoch keine Bewertungen
- ECE461 - Motor Lab - Experiment5 PDFDokument13 SeitenECE461 - Motor Lab - Experiment5 PDFengshimaaNoch keine Bewertungen
- 2019ee30598 Exp 5Dokument6 Seiten2019ee30598 Exp 5Prashant KumarNoch keine Bewertungen
- Is The Time Constant of G: T T P P P T RDokument5 SeitenIs The Time Constant of G: T T P P P T Romer1299Noch keine Bewertungen
- SLA707xM Series: 2-Phase Unipolar Stepper Motor DriverDokument20 SeitenSLA707xM Series: 2-Phase Unipolar Stepper Motor DriverKatherine EsperillaNoch keine Bewertungen
- Lecture DC MachinesDokument40 SeitenLecture DC MachinesPrathap VuyyuruNoch keine Bewertungen
- World's Largest Science, Technology & Medicine Open Access Book PublisherDokument23 SeitenWorld's Largest Science, Technology & Medicine Open Access Book PublisherrahouaNoch keine Bewertungen
- Calculating Size of Transformer and Voltage Drop Due To Starting of Large Size MotorDokument8 SeitenCalculating Size of Transformer and Voltage Drop Due To Starting of Large Size MotorgebreNoch keine Bewertungen
- Solar Cell I-V Cuk ConverterDokument1 SeiteSolar Cell I-V Cuk ConverterKORAKRIT ANANTA-AUOYPORNNoch keine Bewertungen
- FFB 2907 - FairchildDokument13 SeitenFFB 2907 - FairchildStevenNoch keine Bewertungen
- Features: Schottky Barrier DiodeDokument3 SeitenFeatures: Schottky Barrier Diodeahmad sulaimanNoch keine Bewertungen
- L011516 - EMG-10APB Servo MotorDokument3 SeitenL011516 - EMG-10APB Servo MotorReginaldo KrothNoch keine Bewertungen
- Optimize Output Filter On D-CAP2™ For Stability Improvement: Application ReportDokument8 SeitenOptimize Output Filter On D-CAP2™ For Stability Improvement: Application ReportLeonardo SoaresNoch keine Bewertungen
- Relay CalcDokument12 SeitenRelay CalcMadhu Duraichamy100% (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- Curriculum Vitae: Personal DetailsDokument2 SeitenCurriculum Vitae: Personal DetailsTimoNoch keine Bewertungen
- Economic AspectsDokument16 SeitenEconomic AspectsTimoNoch keine Bewertungen
- System ProtectionDokument35 SeitenSystem ProtectionTimoNoch keine Bewertungen
- 2 SlideDokument1 Seite2 SlideTimoNoch keine Bewertungen
- ETD 820S HomeworkDokument3 SeitenETD 820S HomeworkTimoNoch keine Bewertungen
- 11ee701 - Solid State Drives: Unit - I - Electric Drives Unit - I - SyllabusDokument2 Seiten11ee701 - Solid State Drives: Unit - I - Electric Drives Unit - I - SyllabusTimoNoch keine Bewertungen
- Speed Control of DC Motor: Lecture-11Dokument5 SeitenSpeed Control of DC Motor: Lecture-11TimoNoch keine Bewertungen
- Atm711s Lab 1Dokument4 SeitenAtm711s Lab 1TimoNoch keine Bewertungen
- Etd820s Lab 3 2018Dokument3 SeitenEtd820s Lab 3 2018TimoNoch keine Bewertungen
- Lecture-9: Load Equalization and Two Mark QuestionsDokument6 SeitenLecture-9: Load Equalization and Two Mark QuestionsTimoNoch keine Bewertungen
- 2013 BAC1100 Test 1Dokument8 Seiten2013 BAC1100 Test 1Timo100% (1)
- Unit-2 DC Drives: DC Motors and Their PerformanceDokument19 SeitenUnit-2 DC Drives: DC Motors and Their PerformanceTimoNoch keine Bewertungen
- CH Egg SolutionsDokument34 SeitenCH Egg SolutionsTimoNoch keine Bewertungen
- Etd820s Lab 2 2018Dokument4 SeitenEtd820s Lab 2 2018TimoNoch keine Bewertungen
- Question 2.21: What Are The Reasons of Using Load Equalisation in The Electric Drive? AnswerDokument1 SeiteQuestion 2.21: What Are The Reasons of Using Load Equalisation in The Electric Drive? AnswerTimoNoch keine Bewertungen
- Homwork - 1Dokument15 SeitenHomwork - 1TimoNoch keine Bewertungen
- Emc711s Electrical Machines 315 Lib Assign-2 May-2017 PaperDokument3 SeitenEmc711s Electrical Machines 315 Lib Assign-2 May-2017 PaperTimoNoch keine Bewertungen
- Introduction To Computer Networking ICN511S: Loini Iiyambo Department of Computer ScienceDokument30 SeitenIntroduction To Computer Networking ICN511S: Loini Iiyambo Department of Computer ScienceTimoNoch keine Bewertungen
- Factors For Power SystemsDokument3 SeitenFactors For Power SystemsTimoNoch keine Bewertungen
- True 63Dokument2 SeitenTrue 63stefanygomezNoch keine Bewertungen
- HT Motors Data SheetDokument3 SeitenHT Motors Data SheetSE ESTNoch keine Bewertungen
- Bridge Design Checklist Rev01Dokument7 SeitenBridge Design Checklist Rev01ingjcmv67% (3)
- Sts Lesson 6Dokument13 SeitenSts Lesson 6Ivy Joy BelzaNoch keine Bewertungen
- Tutorial 5 UpdatedDokument2 SeitenTutorial 5 UpdatedChiraag ChiruNoch keine Bewertungen
- Cs - cp56 64 74 Specalog (Qehq1241)Dokument20 SeitenCs - cp56 64 74 Specalog (Qehq1241)firman manaluNoch keine Bewertungen
- How-To Guide: Transaction Launcher (SAP CRM 7.0) .0Dokument22 SeitenHow-To Guide: Transaction Launcher (SAP CRM 7.0) .0Satish DhondalayNoch keine Bewertungen
- Ansi z245 2 1997Dokument31 SeitenAnsi z245 2 1997camohunter71Noch keine Bewertungen
- Digital Filter DesignDokument102 SeitenDigital Filter Designjaun danielNoch keine Bewertungen
- AssignmentDokument2 SeitenAssignmentPhước ĐặngNoch keine Bewertungen
- Bus & Cycle Signs & MarkingsDokument5 SeitenBus & Cycle Signs & MarkingsDaniel YitbarekNoch keine Bewertungen
- Mohana Krishnan KsDokument2 SeitenMohana Krishnan KsKanna MonishNoch keine Bewertungen
- أثر جودة الخدمة المصرفية الإلكترونية في تقوية العلاقة بين المصرف والزبائن - رمزي طلال حسن الردايدة PDFDokument146 Seitenأثر جودة الخدمة المصرفية الإلكترونية في تقوية العلاقة بين المصرف والزبائن - رمزي طلال حسن الردايدة PDFNezo Qawasmeh100% (1)
- Gold Kacha Flyer 2012Dokument2 SeitenGold Kacha Flyer 2012gustavus1Noch keine Bewertungen
- Husic GuideDokument3 SeitenHusic Guideth1mkNoch keine Bewertungen
- Computer 1Dokument8 SeitenComputer 1marce1909Noch keine Bewertungen
- Global Trends 2030 Preview: Interactive Le MenuDokument5 SeitenGlobal Trends 2030 Preview: Interactive Le MenuOffice of the Director of National Intelligence100% (1)
- Exedy 2015 Sports Clutch Catalog WebDokument80 SeitenExedy 2015 Sports Clutch Catalog WebfjhfjNoch keine Bewertungen
- History Desktop PublishingDokument16 SeitenHistory Desktop PublishingsanchezromanNoch keine Bewertungen
- Shyla Jennings Ebook FinalDokument17 SeitenShyla Jennings Ebook FinalChye Yong HockNoch keine Bewertungen
- IEPE Connector - 2021Dokument2 SeitenIEPE Connector - 2021Nguyen Ngoc TuanNoch keine Bewertungen
- CT ManualDokument543 SeitenCT ManualwindroidNoch keine Bewertungen
- Datapipe Fact SheetDokument1 SeiteDatapipe Fact SheetDeneme Deneme AsNoch keine Bewertungen
- Sewa bill-AED 559Dokument1 SeiteSewa bill-AED 559muhdazarNoch keine Bewertungen
- 2c - Types of Stone, Brick and Block MasonryDokument20 Seiten2c - Types of Stone, Brick and Block MasonryZeeshan ShoukatNoch keine Bewertungen
- User Manual For Online EC With QR Code For Portal Users PDFDokument13 SeitenUser Manual For Online EC With QR Code For Portal Users PDFkp pkNoch keine Bewertungen
- Checklist of E/OHS Activities For Asbestos Management: Name of Publication DateDokument20 SeitenChecklist of E/OHS Activities For Asbestos Management: Name of Publication DateidahssNoch keine Bewertungen
- Case Study ppt11Dokument25 SeitenCase Study ppt11WHATS APP STATUSNoch keine Bewertungen
- Azuma 2015 Metrologia 52 360Dokument17 SeitenAzuma 2015 Metrologia 52 360Rudolf KiraljNoch keine Bewertungen
- How To Draw Circuit DiagramDokument1 SeiteHow To Draw Circuit DiagramSAMARJEETNoch keine Bewertungen