Das könnte Ihnen auch gefallen
- Strength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresVon EverandStrength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresBewertung: 4 von 5 Sternen4/5 (1)
- Viscous Damping For Time Domain Finite Element AnalysisDokument9 SeitenViscous Damping For Time Domain Finite Element AnalysisBenesta S.R.LNoch keine Bewertungen
- Psudostatic and Dynamic Analyses of Tunnel in Transversal and Longitudinal DirectionsDokument17 SeitenPsudostatic and Dynamic Analyses of Tunnel in Transversal and Longitudinal DirectionsFederico MalteseNoch keine Bewertungen
- Viscoelastic Properties of MR FluidsDokument10 SeitenViscoelastic Properties of MR FluidsXiong LiNoch keine Bewertungen
- 145CB HamdiDokument8 Seiten145CB HamdisamiNoch keine Bewertungen
- Revisiting The Sliding LadderDokument7 SeitenRevisiting The Sliding Laddereeng8124Noch keine Bewertungen
- Wind Loading and Structural Response Lecture: Towers, Chimneys and MastsDokument31 SeitenWind Loading and Structural Response Lecture: Towers, Chimneys and MastsZaher SharafNoch keine Bewertungen
- (Min. of 0.33qc or 30kg/cm ) : Calculation of Rock Socketing LengthDokument1 Seite(Min. of 0.33qc or 30kg/cm ) : Calculation of Rock Socketing LengthvivekNoch keine Bewertungen
- Mechanics: Point-By-Point Recording of The Projection Parabola As A Function of The Speed and Angle of ProjectionDokument4 SeitenMechanics: Point-By-Point Recording of The Projection Parabola As A Function of The Speed and Angle of ProjectionSebastián NietoNoch keine Bewertungen
- Fen202 Project#1 2023 - 3Dokument6 SeitenFen202 Project#1 2023 - 3Mazhar ZiadehNoch keine Bewertungen
- Tutorial 10 SolutionDokument2 SeitenTutorial 10 Solution秦瑋駿Noch keine Bewertungen
- Stability Evaluation and Design of Tunnel OpeningsDokument11 SeitenStability Evaluation and Design of Tunnel Openingsmaurendomit23Noch keine Bewertungen
- 0 Racking CalculationDokument6 Seiten0 Racking CalculationmrberatNoch keine Bewertungen
- Article 3Dokument10 SeitenArticle 3sami Tub ftNoch keine Bewertungen
- PH11003 Physics I: Free, damped oscillationsDokument5 SeitenPH11003 Physics I: Free, damped oscillationsRohan Ghosh DastidarNoch keine Bewertungen
- Beam structural modelling in ship hydroelastic analysisDokument30 SeitenBeam structural modelling in ship hydroelastic analysisمجتبی فرامرزیNoch keine Bewertungen
- FinaldraftDynamicMachinefoundation PDFDokument11 SeitenFinaldraftDynamicMachinefoundation PDFnagumtechNoch keine Bewertungen
- Effect of Rock Socket Characteristics On Low Strain Integrity Test of PilesDokument7 SeitenEffect of Rock Socket Characteristics On Low Strain Integrity Test of PilesAnjerick TopacioNoch keine Bewertungen
- Mark Z. Jacobson Department of Civil & Environmental Engineering Stanford University Stanford, CA 94305-4020 Jacobson@stanford - EduDokument66 SeitenMark Z. Jacobson Department of Civil & Environmental Engineering Stanford University Stanford, CA 94305-4020 Jacobson@stanford - EduVincent Seow Youk EngNoch keine Bewertungen
- Methods of Estimating Surface Settlement During Driving of Urban TunnelsDokument4 SeitenMethods of Estimating Surface Settlement During Driving of Urban TunnelsMina MiladNoch keine Bewertungen
- Strain-Induced Partially Flat Band, Helical Snake States and Interface Superconductivity in Topological Crystalline InsulatorsDokument7 SeitenStrain-Induced Partially Flat Band, Helical Snake States and Interface Superconductivity in Topological Crystalline InsulatorsluoNoch keine Bewertungen
- Nota FrictionDokument30 SeitenNota FrictionAriq AngahArazNoch keine Bewertungen
- Torsion TestDokument7 SeitenTorsion TestmohanadymtNoch keine Bewertungen
- Finite Element Analysis of Transformer C PDFDokument5 SeitenFinite Element Analysis of Transformer C PDFJose CasaisNoch keine Bewertungen
- LEC12 ProfDokument9 SeitenLEC12 ProfDimi ChippsNoch keine Bewertungen
- Magnetism and MatterDokument8 SeitenMagnetism and MatterTerabaap AayaNoch keine Bewertungen
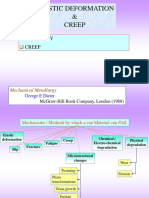
- Plastic Deformation & CreepDokument71 SeitenPlastic Deformation & CreepifrizaldpNoch keine Bewertungen
- Torsion Shaft DesignDokument24 SeitenTorsion Shaft DesignHARSHWARDHAN SINGH SENGARNoch keine Bewertungen
- Dynamics of StructureDokument17 SeitenDynamics of StructureKurt CargoNoch keine Bewertungen
- Laboratory Report No 3Dokument5 SeitenLaboratory Report No 3李志超Noch keine Bewertungen
- Theme - K 5 PDFDokument4 SeitenTheme - K 5 PDFLodro BamasugandiNoch keine Bewertungen
- تصميم عمود 14 متر +مدونه الممارسةDokument27 Seitenتصميم عمود 14 متر +مدونه الممارسةAhmed JaNoch keine Bewertungen
- Anantha &MU Janardhana Iyengar: ( Ceived20 May 1975 Revised 18 Hugest 1975)Dokument9 SeitenAnantha &MU Janardhana Iyengar: ( Ceived20 May 1975 Revised 18 Hugest 1975)yasameenNoch keine Bewertungen
- Analysis of Soil Nailed Earth Slope by Discrete Element MethodDokument14 SeitenAnalysis of Soil Nailed Earth Slope by Discrete Element Method池定憲Noch keine Bewertungen
- Effect of Gearbox Parameters on Housing VibrationsDokument6 SeitenEffect of Gearbox Parameters on Housing VibrationsSh.nasirpurNoch keine Bewertungen
- Torsion of Opened Cross Sections. Loads On Frame Due To Fuselage BendingDokument17 SeitenTorsion of Opened Cross Sections. Loads On Frame Due To Fuselage BendingLUIS ISAAC LEON PARONoch keine Bewertungen
- A X Z L L X X: 2. Description of The Numerical ModelDokument2 SeitenA X Z L L X X: 2. Description of The Numerical Modelel000011Noch keine Bewertungen
- Pile-Driving Analysis by One-Dimensional Wave TheoryDokument22 SeitenPile-Driving Analysis by One-Dimensional Wave TheorytehNoch keine Bewertungen
- End Semester Examination Advanced Foundation EngineeringDokument2 SeitenEnd Semester Examination Advanced Foundation EngineeringSuman SahaNoch keine Bewertungen
- Christoforou1998 PDFDokument15 SeitenChristoforou1998 PDFAlex BrandãoNoch keine Bewertungen
- Elastic and Creep Settlements of Rock Fills: Les Tassements Elastiques Et Secondaires Dans Les Remblais D'enrochementDokument7 SeitenElastic and Creep Settlements of Rock Fills: Les Tassements Elastiques Et Secondaires Dans Les Remblais D'enrochementshenNoch keine Bewertungen
- Sivam Oh An 1985Dokument15 SeitenSivam Oh An 1985DEGAGA AMENUNoch keine Bewertungen
- Ujian Akhir Semester Matematika Teknik 1Dokument12 SeitenUjian Akhir Semester Matematika Teknik 1Aqli SharfanNoch keine Bewertungen
- Numerical Wave Tank For Study Seakeeping of Amphibious VehicleDokument4 SeitenNumerical Wave Tank For Study Seakeeping of Amphibious VehicleBinod KumarNoch keine Bewertungen
- 4icee 0181 PDFDokument10 Seiten4icee 0181 PDFEliotPezoZegarraNoch keine Bewertungen
- A Simple Description of Near-Field and Far-Field Diffraction PDFDokument8 SeitenA Simple Description of Near-Field and Far-Field Diffraction PDFluo wangNoch keine Bewertungen
- Hot-Rolling and Microstructure Model for Dual-Phase SteelsDokument31 SeitenHot-Rolling and Microstructure Model for Dual-Phase SteelsfdcarazoNoch keine Bewertungen
- Mark Z. Jacobson Department of Civil & Environmental Engineering Stanford University Stanford, CA 94305-4020 Jacobson@stanford - EduDokument66 SeitenMark Z. Jacobson Department of Civil & Environmental Engineering Stanford University Stanford, CA 94305-4020 Jacobson@stanford - Eduhrishikesh.phatangareNoch keine Bewertungen
- IAS Mains Physics 2002Dokument8 SeitenIAS Mains Physics 2002RATNADEEP BANERJEENoch keine Bewertungen
- IAS Mains Physics 2002Dokument8 SeitenIAS Mains Physics 2002saleem khanNoch keine Bewertungen
- Non Suitability of Truncated Random Fields For Analyzing Seismic Response of Heterogeneous Soil ProfileDokument9 SeitenNon Suitability of Truncated Random Fields For Analyzing Seismic Response of Heterogeneous Soil ProfileTaulantKarriqiNoch keine Bewertungen
- A FEM Model To Investigate The Lateral Behavior of Cylindrical Piles in Saturated ClayDokument12 SeitenA FEM Model To Investigate The Lateral Behavior of Cylindrical Piles in Saturated ClayAhmed RamadanNoch keine Bewertungen
- Dynamic analysis of thick plates and beamsDokument14 SeitenDynamic analysis of thick plates and beamsAliouane MhamedNoch keine Bewertungen
- Effect of Rocks Anisotropy On Deviation Tendencies of Drilling SystemsDokument4 SeitenEffect of Rocks Anisotropy On Deviation Tendencies of Drilling SystemsMejbahul SarkerNoch keine Bewertungen
- Kumar Rock StrengthDokument6 SeitenKumar Rock StrengthJacobo OrtegaNoch keine Bewertungen
- Practice Mock Test-2024 - T02 (Code-A) - QuestionDokument15 SeitenPractice Mock Test-2024 - T02 (Code-A) - Questionudhav malpaniNoch keine Bewertungen
- Physics P1 PDFDokument15 SeitenPhysics P1 PDFSebastian ChanNoch keine Bewertungen
- Eurocode 8 EN1998-5 2003 - Faccioli LectureDokument34 SeitenEurocode 8 EN1998-5 2003 - Faccioli Lecturepaduco100% (1)
- ExercisesDokument13 SeitenExercisesAhmed Magdy Beshr100% (1)
- 0086 Curved Beam With Out of Plane LoadingDokument3 Seiten0086 Curved Beam With Out of Plane LoadingJoshua KarthikNoch keine Bewertungen
- PJHZ CD Masterlist - 19 January 2016Dokument74 SeitenPJHZ CD Masterlist - 19 January 2016Raja RosenaniNoch keine Bewertungen
- Test 8 Softening PointDokument2 SeitenTest 8 Softening PointRaja RosenaniNoch keine Bewertungen
- Week3lab2 PDFDokument1 SeiteWeek3lab2 PDFRaja RosenaniNoch keine Bewertungen
- SelectionDokument21 SeitenSelectionRaja RosenaniNoch keine Bewertungen
- Challenges to Quality Control in Bored Cast-In-Situ Piling in Growing Urban EnvironmentsDokument17 SeitenChallenges to Quality Control in Bored Cast-In-Situ Piling in Growing Urban Environmentsjacs127Noch keine Bewertungen
- Programming BeginDokument25 SeitenProgramming BeginRaja RosenaniNoch keine Bewertungen
- Repetition LoopingDokument49 SeitenRepetition LoopingRaja RosenaniNoch keine Bewertungen
- Foundation EngineeringDokument4 SeitenFoundation EngineeringRaja RosenaniNoch keine Bewertungen
- 15 Chisel Criteria Vol.VDokument2 Seiten15 Chisel Criteria Vol.VSwamy Mani100% (1)
- Pseudocode and Desk CheckingDokument33 SeitenPseudocode and Desk CheckingRaja Rosenani100% (1)
- Intro To Programming-InputOutputDokument12 SeitenIntro To Programming-InputOutputRaja RosenaniNoch keine Bewertungen
- PROGRAMMING Chapter 1Dokument46 SeitenPROGRAMMING Chapter 1Mohamad Izzulqhair FarisNoch keine Bewertungen
- ArrayDokument37 SeitenArrayRaja RosenaniNoch keine Bewertungen
- Introduction To Pascal Programming Language: Arithmetic Expressions Logical/Boolean Expression Assignment StatementDokument22 SeitenIntroduction To Pascal Programming Language: Arithmetic Expressions Logical/Boolean Expression Assignment StatementHafiz OmarNoch keine Bewertungen
- 1Dokument1 Seite1Raja RosenaniNoch keine Bewertungen
- AnswerrDokument3 SeitenAnswerrRaja RosenaniNoch keine Bewertungen
- Cover Letter AcadDokument2 SeitenCover Letter AcadRaja RosenaniNoch keine Bewertungen
- FLOWCHARTDokument17 SeitenFLOWCHARTRaja RosenaniNoch keine Bewertungen
- WritingDokument7 SeitenWritingRaja RosenaniNoch keine Bewertungen
- Types of Resume: Chronological, Functional & CombinationDokument19 SeitenTypes of Resume: Chronological, Functional & CombinationRaja RosenaniNoch keine Bewertungen
- Note 5 MemosDokument11 SeitenNote 5 MemosRaja RosenaniNoch keine Bewertungen
- SpeakingDokument10 SeitenSpeakingRaja RosenaniNoch keine Bewertungen
- ListeningDokument10 SeitenListeningRaja RosenaniNoch keine Bewertungen
- ReadingDokument10 SeitenReadingRaja RosenaniNoch keine Bewertungen
- VisAidsGraphDokument16 SeitenVisAidsGraphRaja RosenaniNoch keine Bewertungen
- Stresses in Beams-Flexural FormulaDokument15 SeitenStresses in Beams-Flexural FormulaRaja RosenaniNoch keine Bewertungen
- PhoneticsDokument8 SeitenPhoneticsRaja RosenaniNoch keine Bewertungen
- Barriers To Effective CommunicationDokument9 SeitenBarriers To Effective CommunicationRaja RosenaniNoch keine Bewertungen
- 2.stress StrainDokument27 Seiten2.stress StrainRaja RosenaniNoch keine Bewertungen
- Contact Mechanics and Friction: Fig. A3.1 Friction Caused (A)Dokument12 SeitenContact Mechanics and Friction: Fig. A3.1 Friction Caused (A)Nrl SyafiniNoch keine Bewertungen
- Jntua Civil R13 SyllabusDokument106 SeitenJntua Civil R13 SyllabusGuru MaheshNoch keine Bewertungen
- Catalogo SKF PDFDokument48 SeitenCatalogo SKF PDFwilllycorreaNoch keine Bewertungen
- Flow in Water PipingDokument9 SeitenFlow in Water PipingJanNoch keine Bewertungen
- Hopper Design Report 1 Calculation ManualDokument19 SeitenHopper Design Report 1 Calculation ManualHaziq SulaimanNoch keine Bewertungen
- Production Process.II (CBCGS) Module.1 Metal CuttingDokument24 SeitenProduction Process.II (CBCGS) Module.1 Metal CuttingOmkar BedadeNoch keine Bewertungen
- Rudders Design HydrodynamicsDokument11 SeitenRudders Design HydrodynamicsRISHU SINGHNoch keine Bewertungen
- Kobelco Wet Type Clutch WinchDokument5 SeitenKobelco Wet Type Clutch WinchPHÁT NGUYỄN THẾNoch keine Bewertungen
- TYRE DYNAMICS - Part 1 PDFDokument24 SeitenTYRE DYNAMICS - Part 1 PDFManoj ShanmugamNoch keine Bewertungen
- Akr - L - K-Y - N-Angora L - F - Kari - Imlarindan - Ret - Len - PL - K Ve Kuma - Larin - Zell - Kler - Zer - Ne B - R Ara - Tirma (#251942) - 218317Dokument8 SeitenAkr - L - K-Y - N-Angora L - F - Kari - Imlarindan - Ret - Len - PL - K Ve Kuma - Larin - Zell - Kler - Zer - Ne B - R Ara - Tirma (#251942) - 218317razaNoch keine Bewertungen
- Physics For Scientists and Engineers Foundations and Connections Extended Version With Modern 1St Edition Katz Solutions Manual Full Chapter PDFDokument68 SeitenPhysics For Scientists and Engineers Foundations and Connections Extended Version With Modern 1St Edition Katz Solutions Manual Full Chapter PDFBrendaTaylorwzab100% (6)
- Physics, Grade 11 University PrepDokument14 SeitenPhysics, Grade 11 University PrepSabrina TeitelNoch keine Bewertungen
- Aiaa 2009 5692 PDFDokument24 SeitenAiaa 2009 5692 PDFFahd NazimNoch keine Bewertungen
- C1 PanelDokument24 SeitenC1 PanelChandra MohanNoch keine Bewertungen
- Force & PressureDokument2 SeitenForce & PressureNandini SahaNoch keine Bewertungen
- Sri Chaitanya IIT Academy - India: New C2 Ipl (%Dokument4 SeitenSri Chaitanya IIT Academy - India: New C2 Ipl (%MADDINENI VASU75% (4)
- How To Select Carbon Brushes For Motors and GeneratorsDokument16 SeitenHow To Select Carbon Brushes For Motors and GeneratorsKalidass BackNoch keine Bewertungen
- (2020) Ballistic Impact Performance of Multi-Phase STF-impregnated KevlarDokument14 Seiten(2020) Ballistic Impact Performance of Multi-Phase STF-impregnated KevlarJufri ArdiNoch keine Bewertungen
- 8P2A.3 & 4 Newton's Laws of Motion PPT 2017Dokument52 Seiten8P2A.3 & 4 Newton's Laws of Motion PPT 2017Jerome Nicolas Jr. MoraNoch keine Bewertungen
- 118 Worm Gear LubesDokument4 Seiten118 Worm Gear LubesWajahat RasoolNoch keine Bewertungen
- CPP1 RotationaldynamicsDokument14 SeitenCPP1 RotationaldynamicsBNoch keine Bewertungen
- Ink Adhesion Test1Dokument75 SeitenInk Adhesion Test1Pradeep JhaNoch keine Bewertungen
- Name: - Class: - DateDokument4 SeitenName: - Class: - DateFrancis Ho HoNoch keine Bewertungen
- Physics Section - IDokument6 SeitenPhysics Section - ISayan Kumar KhanNoch keine Bewertungen
- Science Yearly Plan: Year 6 2013Dokument14 SeitenScience Yearly Plan: Year 6 2013Rajesware GovindasamyNoch keine Bewertungen
- Soil 2 10-VI AND: DistDokument52 SeitenSoil 2 10-VI AND: DistAnonymous LMLOogONoch keine Bewertungen
- Dow Molykote BrakesDokument5 SeitenDow Molykote BrakesmarcosNoch keine Bewertungen
- Icse Class 4 Hy Science 2019Dokument4 SeitenIcse Class 4 Hy Science 2019Omi GuptaNoch keine Bewertungen
- 1balance and Unbalanced ForcesDokument20 Seiten1balance and Unbalanced ForcesCabalan O. Charles KevinNoch keine Bewertungen
- Forces and Motion Basics - FrictionDokument4 SeitenForces and Motion Basics - FrictionPia Rose BaguioNoch keine Bewertungen