Das könnte Ihnen auch gefallen
- Logic Design Styles: Dinesh SharmaDokument22 SeitenLogic Design Styles: Dinesh SharmasunilsheelavantNoch keine Bewertungen
- Unit # 3 Basics of Digital Cmos Design: Chapter 1: Combinational Mos Logic CircuitsDokument67 SeitenUnit # 3 Basics of Digital Cmos Design: Chapter 1: Combinational Mos Logic CircuitsPunith Gowda M B50% (2)
- Chap16 2 CMOS Inverter ModifiedDokument14 SeitenChap16 2 CMOS Inverter ModifiedSai Kiran OrugantiNoch keine Bewertungen
- Vlsi Lab 1Dokument11 SeitenVlsi Lab 1Shawon karmokar JotyNoch keine Bewertungen
- U 3Dokument13 SeitenU 3Maheshwar Reddy100% (1)
- Combinational Mos Logic Circuits: Basic ConceptsDokument41 SeitenCombinational Mos Logic Circuits: Basic Conceptsflampard24Noch keine Bewertungen
- 6.012 DP: CMOS Integrated Differential Amplifier: Tony Hyun KimDokument9 Seiten6.012 DP: CMOS Integrated Differential Amplifier: Tony Hyun Kimanil kumarNoch keine Bewertungen
- Delay in VLSIDokument27 SeitenDelay in VLSIlevan100% (1)
- Tional Logic (Or Non-Regenerative) Circuits That Have The Property That at Any Point in TimeDokument7 SeitenTional Logic (Or Non-Regenerative) Circuits That Have The Property That at Any Point in Timeميسر محسنNoch keine Bewertungen
- Power System Simulation - Prof - Jain B. MarshelDokument72 SeitenPower System Simulation - Prof - Jain B. MarshelRicuater GutierrezNoch keine Bewertungen
- Power System Simulation - Prof - Jain B. MarshelDokument72 SeitenPower System Simulation - Prof - Jain B. MarshelRaquel1896Noch keine Bewertungen
- Euler's PathDokument10 SeitenEuler's PathSatish Kumar0% (1)
- Power System Simulation - Prof - Jain B. Marshel - ScilabDokument72 SeitenPower System Simulation - Prof - Jain B. Marshel - ScilabJerry ValdezNoch keine Bewertungen
- Single-Stage Integrated-Circuit AmplifiersDokument22 SeitenSingle-Stage Integrated-Circuit Amplifierss.r.Noch keine Bewertungen
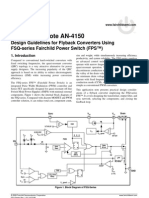
- Application Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Dokument16 SeitenApplication Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Nagendra ChaitanyaNoch keine Bewertungen
- Coe 236 Digital Electronics: Dr. Mohannad H. Al-Ali Department of Computer Engineering University of Basrah Spring 2020Dokument14 SeitenCoe 236 Digital Electronics: Dr. Mohannad H. Al-Ali Department of Computer Engineering University of Basrah Spring 2020لطيف احمد حسنNoch keine Bewertungen
- Lab (GPDK)Dokument49 SeitenLab (GPDK)Murali MurariNoch keine Bewertungen
- U18ec038 - Vlsi - Lab 2Dokument9 SeitenU18ec038 - Vlsi - Lab 2Timir PatelNoch keine Bewertungen
- UNIT-05-Advanced Techniques by BRRDokument27 SeitenUNIT-05-Advanced Techniques by BRRBhargavi NarisettiNoch keine Bewertungen
- ECE 410 Homework 7 - Solution Spring 2008Dokument4 SeitenECE 410 Homework 7 - Solution Spring 2008ET onlineNoch keine Bewertungen
- Infineon CDM10V DS v01 - 03 ENDokument20 SeitenInfineon CDM10V DS v01 - 03 ENJakieNoch keine Bewertungen
- Exp10 Cmos Inv PDFDokument7 SeitenExp10 Cmos Inv PDFJohn wickNoch keine Bewertungen
- Vlsi Report Using LatexDokument46 SeitenVlsi Report Using LatexJoshua JusticeNoch keine Bewertungen
- Coen6511 Lecture 9: Digital Circuit HierarchyDokument14 SeitenCoen6511 Lecture 9: Digital Circuit Hierarchydeathnote gotNoch keine Bewertungen
- Lec31 LogicGateCMOSDokument63 SeitenLec31 LogicGateCMOSPhamphuquynh1222Noch keine Bewertungen
- Cmos Vlsi Vtu NotesDokument51 SeitenCmos Vlsi Vtu NotesDwaraka Oruganti100% (2)
- MC145151 2Dokument26 SeitenMC145151 2elvisspeedyNoch keine Bewertungen
- VM Switching PowerDokument81 SeitenVM Switching PowerSuman MalikNoch keine Bewertungen
- Design of High Gain CMOS Comparator With Slew Rate of 10V/ SDokument5 SeitenDesign of High Gain CMOS Comparator With Slew Rate of 10V/ SShivamNoch keine Bewertungen
- CMOS IntroDokument39 SeitenCMOS IntrovenkateshNoch keine Bewertungen
- Vlsi Laboratory: List of ExperimentsDokument49 SeitenVlsi Laboratory: List of ExperimentssantoshNoch keine Bewertungen
- Static Cmos DesignDokument7 SeitenStatic Cmos Designtechspaceofatul100% (3)
- LMX2322Dokument14 SeitenLMX2322Igo_MichelNoch keine Bewertungen
- VLSILABVVVVIMPDokument19 SeitenVLSILABVVVVIMPGirija M HegdeNoch keine Bewertungen
- 41311tpnews 05142020Dokument3 Seiten41311tpnews 05142020muskulayashwanthreddy175Noch keine Bewertungen
- Combination Logic CircuitsDokument21 SeitenCombination Logic Circuitsamitssaksena100% (1)
- TI Offset NullingDokument15 SeitenTI Offset NullingHansWurst5831Noch keine Bewertungen
- Design and Performance Analysis of 2Dokument24 SeitenDesign and Performance Analysis of 2Dilip Kumar100% (1)
- 3 Phase Controller CD 00040795Dokument50 Seiten3 Phase Controller CD 00040795eujanroNoch keine Bewertungen
- Tri State InverterDokument18 SeitenTri State InverterManasa Upadhyaya100% (1)
- Low Power MuxDokument4 SeitenLow Power MuxPromit MandalNoch keine Bewertungen
- Model 1Dokument22 SeitenModel 1Vinay MLNoch keine Bewertungen
- Sem NotesDokument39 SeitenSem NotesN NandiniNoch keine Bewertungen
- Ganged CMOS LogicDokument5 SeitenGanged CMOS Logicavinash_yuvarajNoch keine Bewertungen
- Ec1461 Vlsi DesignDokument17 SeitenEc1461 Vlsi DesignArunkumarNoch keine Bewertungen
- The Cmos Inverter: OutlineDokument20 SeitenThe Cmos Inverter: OutlinehappyharrNoch keine Bewertungen
- Layout of The Cmos InverterDokument20 SeitenLayout of The Cmos InvertercngindiNoch keine Bewertungen
- TechRef StaticVarSystemDokument23 SeitenTechRef StaticVarSystemAlexNoch keine Bewertungen
- Combination Logic Design: Pradondet Nilagupta Pom@ku - Ac.th Department of Computer Engineering Kasetsart UniversityDokument78 SeitenCombination Logic Design: Pradondet Nilagupta Pom@ku - Ac.th Department of Computer Engineering Kasetsart UniversitybhawnaNoch keine Bewertungen
- Mosfet Using Tanner ToolDokument20 SeitenMosfet Using Tanner ToolParmeet SinghNoch keine Bewertungen
- Cmos Inverter CharacterizationDokument54 SeitenCmos Inverter CharacterizationVivekNoch keine Bewertungen
- Cmos 3Dokument26 SeitenCmos 3nandanvrNoch keine Bewertungen
- VLSI Design SoC CH 6Dokument125 SeitenVLSI Design SoC CH 6Arqam Ali KhanNoch keine Bewertungen
- VLSI Design Lecture NotesDokument117 SeitenVLSI Design Lecture NotesRaji SharmiNoch keine Bewertungen
- Transistor Switching and Sequential CircuitsVon EverandTransistor Switching and Sequential CircuitsBewertung: 5 von 5 Sternen5/5 (1)
- Transistor Electronics: Use of Semiconductor Components in Switching OperationsVon EverandTransistor Electronics: Use of Semiconductor Components in Switching OperationsBewertung: 1 von 5 Sternen1/5 (1)
- Digital Compensation for Analog Front-Ends: A New Approach to Wireless Transceiver DesignVon EverandDigital Compensation for Analog Front-Ends: A New Approach to Wireless Transceiver DesignNoch keine Bewertungen
- OFDM-Based Broadband Wireless Networks: Design and OptimizationVon EverandOFDM-Based Broadband Wireless Networks: Design and OptimizationNoch keine Bewertungen
- Critikon Dinamap ECG Modul - Service ManualDokument75 SeitenCritikon Dinamap ECG Modul - Service ManualAyaovi JorlauNoch keine Bewertungen
- DEPpart 4Dokument185 SeitenDEPpart 4nguyenhainam910Noch keine Bewertungen
- Digital Microelectronic Circuits (: Pass Transistor LogicDokument52 SeitenDigital Microelectronic Circuits (: Pass Transistor LogicPrìñçé ÅsîfNoch keine Bewertungen
- Literature ReviewDokument2 SeitenLiterature ReviewkhairulNoch keine Bewertungen
- MCQ of CODDokument8 SeitenMCQ of CODmanikanta.reddy329Noch keine Bewertungen
- Fy BSC Computer ScienceDokument7 SeitenFy BSC Computer ScienceHemlata GuptaNoch keine Bewertungen
- LT24 User Manual Vo04Dokument24 SeitenLT24 User Manual Vo04Lạc DươngNoch keine Bewertungen
- Companion WebsiteDokument110 SeitenCompanion WebsiteDren FazliuNoch keine Bewertungen
- Ugrd cs6301 Logic Design Digital Computer Circuits Prelim To Finals Perfect - CompressDokument9 SeitenUgrd cs6301 Logic Design Digital Computer Circuits Prelim To Finals Perfect - CompressMike Rafael NagañoNoch keine Bewertungen
- Agh - Manual - Ac 2000 Poultry Install en v8.11 r1.1Dokument38 SeitenAgh - Manual - Ac 2000 Poultry Install en v8.11 r1.1Chisela ChitiNoch keine Bewertungen
- NMX GettingStartedDokument202 SeitenNMX GettingStartedVurdalack666100% (2)
- Digital Electronics Sample Chapter PDFDokument106 SeitenDigital Electronics Sample Chapter PDFRokiniKumarasamyNoch keine Bewertungen
- CSA - Chapter 1Dokument39 SeitenCSA - Chapter 1Nikita vermaNoch keine Bewertungen
- Lecture 7Dokument89 SeitenLecture 7ASADISMAEELNoch keine Bewertungen
- Digital ThermometerDokument28 SeitenDigital ThermometerRajith SebastianNoch keine Bewertungen
- Tcoil SST TX Kossel JSSC 2008Dokument16 SeitenTcoil SST TX Kossel JSSC 2008顏敬賢Noch keine Bewertungen
- Using The ADC0808/ ADC0809 8-Bit MP Compatible A/D Converters With 8-Channel Analog MultiplexerDokument16 SeitenUsing The ADC0808/ ADC0809 8-Bit MP Compatible A/D Converters With 8-Channel Analog MultiplexerSantiago SerranoNoch keine Bewertungen
- DCS Assignment 1Dokument5 SeitenDCS Assignment 1Aayush JainNoch keine Bewertungen
- Katalog Plt111 1999 enDokument90 SeitenKatalog Plt111 1999 enbajricaNoch keine Bewertungen
- LOGIC - CIRCUITS Final Exam Q2 2010 - 2011 Problems and Answer KeyDokument2 SeitenLOGIC - CIRCUITS Final Exam Q2 2010 - 2011 Problems and Answer KeySimon Gregory Mabanta100% (1)
- CS5532Dokument50 SeitenCS5532Héctor LiendoNoch keine Bewertungen
- 74 HC 4316Dokument12 Seiten74 HC 4316jhonco02Noch keine Bewertungen
- CO - 7th UNITDokument17 SeitenCO - 7th UNITStudent NameNoch keine Bewertungen
- Problem Set 1Dokument4 SeitenProblem Set 1Pradyumn PaliwalNoch keine Bewertungen
- 74HC4051 STMicroelectronicsDokument17 Seiten74HC4051 STMicroelectronicsLeonel AntonioNoch keine Bewertungen
- DSD Notes Unit 4 PDFDokument15 SeitenDSD Notes Unit 4 PDFVAISHAKA N RAJNoch keine Bewertungen
- Ic ApplicationsDokument37 SeitenIc ApplicationsAllanki Sanyasi RaoNoch keine Bewertungen
- Exp 5Dokument6 SeitenExp 5RishabhNoch keine Bewertungen
- Lec Verilog TrafficLight SynthesisDokument32 SeitenLec Verilog TrafficLight SynthesisKartikey ManchandaNoch keine Bewertungen
- CC442 NAQAA Form 11Dokument3 SeitenCC442 NAQAA Form 11MuhamdA.BadawyNoch keine Bewertungen