Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- IBRO News 2004Dokument8 SeitenIBRO News 2004International Brain Research Organization100% (1)
- BeginnersGuide AndroidonOmapZoomDokument10 SeitenBeginnersGuide AndroidonOmapZoomm13marleNoch keine Bewertungen
- Policy Analysis ReportDokument16 SeitenPolicy Analysis ReportGhelvin Auriele AguirreNoch keine Bewertungen
- TELEMAC Code InstructionsDokument3 SeitenTELEMAC Code Instructionskim lee pooNoch keine Bewertungen
- Do You Have Esp FinalDokument20 SeitenDo You Have Esp FinalVrasidas Poulopoulos50% (2)
- Critical Point of View: A Wikipedia ReaderDokument195 SeitenCritical Point of View: A Wikipedia Readerrll307Noch keine Bewertungen
- PlagarisimDokument2 SeitenPlagarisimabdullah0336.juttNoch keine Bewertungen
- A Tribute To Fernando L. L. B. Carneiro (1913 - 2001)Dokument2 SeitenA Tribute To Fernando L. L. B. Carneiro (1913 - 2001)Roberto Urrutia100% (1)
- SYLLABUS For DRAW 122Dokument7 SeitenSYLLABUS For DRAW 122Alther Dabon0% (1)
- Heat and Cooling LoadDokument2 SeitenHeat and Cooling LoadAshokNoch keine Bewertungen
- Bao Nguyen - Internship Report v1Dokument41 SeitenBao Nguyen - Internship Report v1Giao DươngNoch keine Bewertungen
- Gpcdoc Gtds Shell Gadus s3 v460xd 2 (En) TdsDokument2 SeitenGpcdoc Gtds Shell Gadus s3 v460xd 2 (En) TdsRoger ObregonNoch keine Bewertungen
- Contoh RefleksiDokument7 SeitenContoh RefleksiIzzat HanifNoch keine Bewertungen
- Canada Post ReportDokument202 SeitenCanada Post ReportrgranatsteinNoch keine Bewertungen
- Heat Transfer in Stagnation-Point Flow Towards A Stretching SheetDokument5 SeitenHeat Transfer in Stagnation-Point Flow Towards A Stretching SheetboiroyNoch keine Bewertungen
- Computer Graphics Question For Final ExamDokument3 SeitenComputer Graphics Question For Final ExamMd Rifat BhuiyanNoch keine Bewertungen
- Brandi Jones-5e-Lesson-Plan 2Dokument3 SeitenBrandi Jones-5e-Lesson-Plan 2api-491136095Noch keine Bewertungen
- Fidelizer Pro User GuideDokument12 SeitenFidelizer Pro User GuidempptritanNoch keine Bewertungen
- Project Guidelines: (A Manual For Preparation of Project Report)Dokument4 SeitenProject Guidelines: (A Manual For Preparation of Project Report)Shivam TiwariNoch keine Bewertungen
- CPCCCM2006 - Learner Guide V1.0Dokument89 SeitenCPCCCM2006 - Learner Guide V1.0Sid SharmaNoch keine Bewertungen
- Cee 2005 - 06Dokument129 SeitenCee 2005 - 06iloveeggxPNoch keine Bewertungen
- Prospectus For Admission Into Postgraduate Programs at BUET April-2013Dokument6 SeitenProspectus For Admission Into Postgraduate Programs at BUET April-2013missilemissionNoch keine Bewertungen
- Lp-7 2019-Ratio and ProportionDokument5 SeitenLp-7 2019-Ratio and Proportionroy c. diocampoNoch keine Bewertungen
- 27 EtdsDokument29 Seiten27 EtdsSuhag PatelNoch keine Bewertungen
- Vertical Axis Wind Turbine ProjDokument2 SeitenVertical Axis Wind Turbine Projmacsan sanchezNoch keine Bewertungen
- (Solved) at The Instant Shown, 60Dokument3 Seiten(Solved) at The Instant Shown, 60marcosbispolimaNoch keine Bewertungen
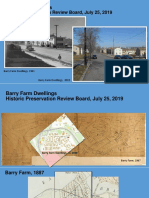
- Barry Farm Powerpoint SlidesDokument33 SeitenBarry Farm Powerpoint SlidessarahNoch keine Bewertungen
- Ieee Sight 2018 Call For PapersDokument4 SeitenIeee Sight 2018 Call For PapersThushar TomNoch keine Bewertungen
- Problem Solving and Algorithms: Problems, Solutions, and ToolsDokument12 SeitenProblem Solving and Algorithms: Problems, Solutions, and ToolsskarthikpriyaNoch keine Bewertungen
- Joshi C M, Vyas Y - Extensions of Certain Classical Integrals of Erdélyi For Gauss Hypergeometric Functions - J. Comput. and Appl. Mat. 160 (2003) 125-138Dokument14 SeitenJoshi C M, Vyas Y - Extensions of Certain Classical Integrals of Erdélyi For Gauss Hypergeometric Functions - J. Comput. and Appl. Mat. 160 (2003) 125-138Renee BravoNoch keine Bewertungen