Das könnte Ihnen auch gefallen
- Ficha Técnica de La Convocatoria para Becas de Energías RenovablesDokument1 SeiteFicha Técnica de La Convocatoria para Becas de Energías RenovablesCirilo Zárate ValdiviesoNoch keine Bewertungen
- CONVOCATORIA - Experto Universitario en Energías Renovables 2017Dokument6 SeitenCONVOCATORIA - Experto Universitario en Energías Renovables 2017Cirilo Zárate ValdiviesoNoch keine Bewertungen
- Summary in Spanish PDFDokument15 SeitenSummary in Spanish PDFlinderantonyNoch keine Bewertungen
- Convocatoria Becas Al Extranjero 2018Dokument2 SeitenConvocatoria Becas Al Extranjero 2018Cirilo Zárate ValdiviesoNoch keine Bewertungen
- Unidad 1Dokument18 SeitenUnidad 1Cirilo Zárate ValdiviesoNoch keine Bewertungen
- Transformada de Laplace 2 PDFDokument5 SeitenTransformada de Laplace 2 PDF123peniscolaNoch keine Bewertungen
- Instalaciones de Gas LP, Uso Domestico.Dokument15 SeitenInstalaciones de Gas LP, Uso Domestico.RobertIsaiRuizAcosta100% (1)
- La Condición Humana Actual de Heller AgnesDokument2 SeitenLa Condición Humana Actual de Heller AgnesCirilo Zárate ValdiviesoNoch keine Bewertungen
- ManualOperacionSoldadoraArcotron160Dokument24 SeitenManualOperacionSoldadoraArcotron160Salomon Cruz VenturaNoch keine Bewertungen
- Unidad 1Dokument18 SeitenUnidad 1Cirilo Zárate ValdiviesoNoch keine Bewertungen
- Resumen de MuestraDokument1 SeiteResumen de MuestraCirilo Zárate ValdiviesoNoch keine Bewertungen
- La Condición Humana Actual de Heller AgnesDokument2 SeitenLa Condición Humana Actual de Heller AgnesCirilo Zárate ValdiviesoNoch keine Bewertungen
- Transformador: principio de funcionamiento y partesDokument14 SeitenTransformador: principio de funcionamiento y partesCirilo Zárate ValdiviesoNoch keine Bewertungen
- Sistemas de ControlDokument18 SeitenSistemas de ControlCirilo Zárate ValdiviesoNoch keine Bewertungen
- Arquitectonico 1Dokument1 SeiteArquitectonico 1Cirilo Zárate ValdiviesoNoch keine Bewertungen
- ACRONIMOSDokument7 SeitenACRONIMOSCirilo Zárate ValdiviesoNoch keine Bewertungen
- Financiamiento Clomatico TecMonterreyDokument4 SeitenFinanciamiento Clomatico TecMonterreyGreysi RiveraNoch keine Bewertungen
- Capitu IDokument11 SeitenCapitu ICirilo Zárate ValdiviesoNoch keine Bewertungen
- Textos InstruccionalesDokument4 SeitenTextos InstruccionalesCirilo Zárate ValdiviesoNoch keine Bewertungen
- Antologia HistoriaDokument40 SeitenAntologia HistoriaOsvaldo Nava Saenes0% (1)
- 5 Historia Clínica Adulto ActualokDokument5 Seiten5 Historia Clínica Adulto ActualokCirilo Zárate ValdiviesoNoch keine Bewertungen
- Conocimspnto Historia en La E: Licenciatura en Educación Plan 1994Dokument75 SeitenConocimspnto Historia en La E: Licenciatura en Educación Plan 1994Cirilo Zárate ValdiviesoNoch keine Bewertungen
- Día Mundial Del LibroDokument3 SeitenDía Mundial Del LibroCirilo Zárate ValdiviesoNoch keine Bewertungen
- Tecnicas de Mantenimiento Industrial Juan Díaz NavarroDokument246 SeitenTecnicas de Mantenimiento Industrial Juan Díaz Navarroisamelgq100% (3)
- Tuberías, válvulas y accesorios de una planta químicaDokument50 SeitenTuberías, válvulas y accesorios de una planta químicaFELIX MEJIA REGALADONoch keine Bewertungen
- Programa Taller de Investigación IDokument10 SeitenPrograma Taller de Investigación ILaura López VelaNoch keine Bewertungen
- Taller de Investigacion 1Dokument50 SeitenTaller de Investigacion 1Cirilo Zárate ValdiviesoNoch keine Bewertungen
- Actividad Económica de La ComunidadDokument2 SeitenActividad Económica de La ComunidadCirilo Zárate ValdiviesoNoch keine Bewertungen
- Presupuesto Proyecto SurcoDokument1 SeitePresupuesto Proyecto SurcoAngie Maryouri Junco SánchezNoch keine Bewertungen
- PETS-IZAJE, CARGA YO DESCARGA DE EQUIPOS Y MATERIALES DE LA PTAR-SBR 25m3dia - SMCDokument3 SeitenPETS-IZAJE, CARGA YO DESCARGA DE EQUIPOS Y MATERIALES DE LA PTAR-SBR 25m3dia - SMCKevin Vergara IglesiasNoch keine Bewertungen
- TDR DCH 2023-2Dokument7 SeitenTDR DCH 2023-2Mariana Lizeth Junco MunozNoch keine Bewertungen
- Tarea2AE Nicolalde2Dokument21 SeitenTarea2AE Nicolalde2Javier Daniel NikolaldeNoch keine Bewertungen
- OndasyopticaDokument3 SeitenOndasyopticaCRISTIAN CAMILO MONTES VARGASNoch keine Bewertungen
- Informe anual de Gobierno Corporativo 2020Dokument174 SeitenInforme anual de Gobierno Corporativo 2020yesica johana gonzalez santamariaNoch keine Bewertungen
- Principio de Legalidad PresupuestarioDokument24 SeitenPrincipio de Legalidad PresupuestarioBryan SalazarNoch keine Bewertungen
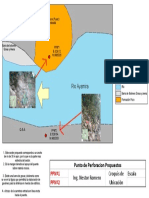
- Formacion Pozo (P-poz) Roca fracturada Rio AyamiraDokument1 SeiteFormacion Pozo (P-poz) Roca fracturada Rio AyamiraJunior Andia CarbajalNoch keine Bewertungen
- PC1 Estructuras determinar fuerzas cables candelabro vigasDokument2 SeitenPC1 Estructuras determinar fuerzas cables candelabro vigasJorge Valverde OlivaNoch keine Bewertungen
- Implementación de Los Instrumentos Legales Nacional en El Marco Del "Convenio Fal 65" para Su Implantación en VenezuelaDokument78 SeitenImplementación de Los Instrumentos Legales Nacional en El Marco Del "Convenio Fal 65" para Su Implantación en Venezueladani lopezNoch keine Bewertungen
- Ovheakebr6i75t2qx8iq Signature Poli 150128132001 Conversion Gate01Dokument10 SeitenOvheakebr6i75t2qx8iq Signature Poli 150128132001 Conversion Gate01Dairo CervantesNoch keine Bewertungen
- EETT ALcantarillado Y Agua PotableDokument17 SeitenEETT ALcantarillado Y Agua PotableFrancisco Javier Saavedra VigorenaNoch keine Bewertungen
- Protección AnódicaDokument6 SeitenProtección AnódicaRoy Jean Pierre Caballero Carrasco100% (1)
- PR. Modifica Res. 3753 de 2015 PRORROGA Reglamento Tecnico Vehiculos de PasajerosDokument6 SeitenPR. Modifica Res. 3753 de 2015 PRORROGA Reglamento Tecnico Vehiculos de PasajerosEduardo FlorezNoch keine Bewertungen
- Aprendiendo JavaScript Carlos Azaustre FDokument91 SeitenAprendiendo JavaScript Carlos Azaustre FOsvaldo Fuentes67% (3)
- Johanna Mancilla Quintana Cuarentena Informe PDFDokument11 SeitenJohanna Mancilla Quintana Cuarentena Informe PDFJohanna MancillaNoch keine Bewertungen
- Hoja de vida ingeniero químicoDokument2 SeitenHoja de vida ingeniero químicoYomar GuillenNoch keine Bewertungen
- Análisis de conflictos en la estructura organizacional de American Dream Holdings LtdDokument2 SeitenAnálisis de conflictos en la estructura organizacional de American Dream Holdings LtdKleo CrispinNoch keine Bewertungen
- Daniela RivadeneiraS8EXTDokument10 SeitenDaniela RivadeneiraS8EXTdaniela rivadeneiraNoch keine Bewertungen
- Actividad 1 1er Corte - Algebra LinealDokument34 SeitenActividad 1 1er Corte - Algebra LinealKevin Yadir MARTINEZ RAMONNoch keine Bewertungen
- Memoria Descriptiva (Caminos I)Dokument20 SeitenMemoria Descriptiva (Caminos I)Andy Greey Mera VásquezNoch keine Bewertungen
- Semanario Todo Minería 06.03.2022Dokument13 SeitenSemanario Todo Minería 06.03.2022Abraham A. Monteza PeraltaNoch keine Bewertungen
- Impedancia Reflejada InformeDokument12 SeitenImpedancia Reflejada InformeNina DavisNoch keine Bewertungen
- Para ImprimirDokument260 SeitenPara ImprimirJoselito Edber Meza MezaNoch keine Bewertungen
- Proforma ImpresorasDokument1 SeiteProforma Impresorasmiltonsan83Noch keine Bewertungen
- Ficha Picanto1.2Dokument2 SeitenFicha Picanto1.2Brenda ChavezNoch keine Bewertungen
- Funciones del dinero: medio de pago, unidad de cuenta y depósito de valorDokument1 SeiteFunciones del dinero: medio de pago, unidad de cuenta y depósito de valorCARLOS XAVIEL PEREZ PUJOLSNoch keine Bewertungen
- Hardy Cross y - RenouardDokument4 SeitenHardy Cross y - RenouardAndres Jaimes EscaleraNoch keine Bewertungen
- R.M. 116-2022-Vivienda Ugm UltimoDokument3 SeitenR.M. 116-2022-Vivienda Ugm UltimoIsabel Huarca CruzNoch keine Bewertungen
- Generación y Depuracion de IdeasDokument1 SeiteGeneración y Depuracion de IdeasFernando ZuñigaNoch keine Bewertungen