Das könnte Ihnen auch gefallen
- The Planar Shape of Rock JointsDokument14 SeitenThe Planar Shape of Rock JointsAzeNoch keine Bewertungen
- Geometry of Surfaces: A Practical Guide for Mechanical EngineersVon EverandGeometry of Surfaces: A Practical Guide for Mechanical EngineersNoch keine Bewertungen
- 1993 JoSG Strain Kinematic Analysis General Shear Zones PDFDokument20 Seiten1993 JoSG Strain Kinematic Analysis General Shear Zones PDFLalit JoshiNoch keine Bewertungen
- Strain EllipsoidDokument7 SeitenStrain EllipsoidArkaprabha Sarkar100% (1)
- BarretDokument11 SeitenBarretMaría Emilia TorresNoch keine Bewertungen
- Nomenclature and Geometric Classification of Cleavage Transected Folds-T.e. JohnsonDokument14 SeitenNomenclature and Geometric Classification of Cleavage Transected Folds-T.e. JohnsonEdilberAntonyChipanaPariNoch keine Bewertungen
- Solutions To Problems in Book PDFDokument19 SeitenSolutions To Problems in Book PDFAdv. Govind S. TehareNoch keine Bewertungen
- Geological Society of America Bulletin 1970 TCHALENKO 1625 40Dokument15 SeitenGeological Society of America Bulletin 1970 TCHALENKO 1625 40Nacho HenriquezNoch keine Bewertungen
- FoldsDokument34 SeitenFoldsDheo Aldava100% (1)
- 3D Curvature Attributes - A New Approach For Seismic InterpretationDokument8 Seiten3D Curvature Attributes - A New Approach For Seismic InterpretationWoi Loon100% (1)
- 2019 - Grasemann Et Al.Dokument9 Seiten2019 - Grasemann Et Al.Adriel senciaNoch keine Bewertungen
- Graduate School in Highway and Trafic Engineering, University of Biuminyham, Birmingham (Great Britain)Dokument20 SeitenGraduate School in Highway and Trafic Engineering, University of Biuminyham, Birmingham (Great Britain)Janaki RamNoch keine Bewertungen
- Ranalli 1974Dokument8 SeitenRanalli 1974Som DevNoch keine Bewertungen
- ExcerptDokument10 SeitenExcerptdiane camarena lobatoNoch keine Bewertungen
- Discontinuity Spacings in RockDokument14 SeitenDiscontinuity Spacings in RockGisber Mamani ColcaNoch keine Bewertungen
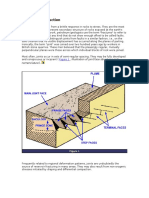
- Estructuras PlumosasDokument11 SeitenEstructuras PlumosasJorge Cortez CampañaNoch keine Bewertungen
- Structural AnalysisDokument15 SeitenStructural AnalysisS Hashim RizviNoch keine Bewertungen
- Slope TheoryDokument17 SeitenSlope TheoryAndres CastilloNoch keine Bewertungen
- Geomorphometry and Landform Mapping, What Is A LandformDokument13 SeitenGeomorphometry and Landform Mapping, What Is A LandformSaxenaNoch keine Bewertungen
- Particle Shape Analysis: GEL 324 SedimentologyDokument9 SeitenParticle Shape Analysis: GEL 324 SedimentologyGiovany alfinNoch keine Bewertungen
- Brittle Microtectonics PDFDokument21 SeitenBrittle Microtectonics PDFRenato Santiago100% (2)
- Chapter 3Dokument73 SeitenChapter 3Licia AudinaNoch keine Bewertungen
- Park 2005Dokument7 SeitenPark 2005Laode Jonas TugoNoch keine Bewertungen
- A New Approach For Persistence in Probabilistic Rock Slope Stability AnalysisDokument7 SeitenA New Approach For Persistence in Probabilistic Rock Slope Stability AnalysisCostas SachpazisNoch keine Bewertungen
- A Comprehensive Wheel Terrain Contact MoDokument19 SeitenA Comprehensive Wheel Terrain Contact MocticusorNoch keine Bewertungen
- Hudson y Priest (1976)Dokument14 SeitenHudson y Priest (1976)malvarezcNoch keine Bewertungen
- Boyer and Elliot 1982. Thrust SystemsDokument36 SeitenBoyer and Elliot 1982. Thrust SystemsSofia Carolina AvellanedaNoch keine Bewertungen
- Analise SensibilidadeDokument10 SeitenAnalise SensibilidadeThiago R. GomesNoch keine Bewertungen
- Laurent 1987Dokument5 SeitenLaurent 1987francarlos de la cruz chuquimangoNoch keine Bewertungen
- JointsDokument9 SeitenJointsUtkarsh SharmaNoch keine Bewertungen
- Joints & FracturesDokument14 SeitenJoints & Fracturesfiqia nchaNoch keine Bewertungen
- Brittle MicrotectonicsDokument19 SeitenBrittle MicrotectonicsPaul Quispe SolanoNoch keine Bewertungen
- Lec 4-1 Well Log CorrelationDokument60 SeitenLec 4-1 Well Log CorrelationMangar Mawut100% (2)
- Tavani, S., Storti, F., Fernández, O., Muñoz, J.a., Salvini, F., 2006. 3-D Deformation PatternDokument18 SeitenTavani, S., Storti, F., Fernández, O., Muñoz, J.a., Salvini, F., 2006. 3-D Deformation PatternRodrigo Requelme BorjaNoch keine Bewertungen
- NDX ChopraDokument6 SeitenNDX ChopraPrana TobingNoch keine Bewertungen
- Geological Maps 2022Dokument13 SeitenGeological Maps 2022Kisaakye GraceNoch keine Bewertungen
- Zero Extension-1Dokument10 SeitenZero Extension-1Dhara Adhnandya KumaraNoch keine Bewertungen
- Introduction To Geological MapsDokument14 SeitenIntroduction To Geological MapsIshtiaq AhmadNoch keine Bewertungen
- Soil Dynamics and Earthquake Engineering: Ngoc-Anh Do, Daniel Dias, Pierpaolo Oreste, Irini Djeran-MaigreDokument11 SeitenSoil Dynamics and Earthquake Engineering: Ngoc-Anh Do, Daniel Dias, Pierpaolo Oreste, Irini Djeran-MaigrePaloma CortizoNoch keine Bewertungen
- Three-Dimensional Reliability Analysis of Earth SlopesDokument17 SeitenThree-Dimensional Reliability Analysis of Earth SlopesbryanerickjorgebNoch keine Bewertungen
- Erin-Bethell@cmail - Carleton.ca: 1278.pdf 51st Lunar and Planetary Science Conference (2020)Dokument2 SeitenErin-Bethell@cmail - Carleton.ca: 1278.pdf 51st Lunar and Planetary Science Conference (2020)Erin BethellNoch keine Bewertungen
- WWW - MINEPORTAL.in: Online Test Series ForDokument31 SeitenWWW - MINEPORTAL.in: Online Test Series ForSusil SenapatiNoch keine Bewertungen
- WWW - MINEPORTAL.in: Online Test Series ForDokument31 SeitenWWW - MINEPORTAL.in: Online Test Series ForSheshu BabuNoch keine Bewertungen
- 300 000 112 975Dokument9 Seiten300 000 112 975Angela CornelioNoch keine Bewertungen
- Journal of Structural Geology: Peter J. Hudleston, Susan H. TreagusDokument30 SeitenJournal of Structural Geology: Peter J. Hudleston, Susan H. TreagusRizky Dwi RenaldyNoch keine Bewertungen
- Structural Contour Maps Applied in The Analysis of Double Fold StructuresDokument8 SeitenStructural Contour Maps Applied in The Analysis of Double Fold StructuresMartin NguyenNoch keine Bewertungen
- Stratigraphic Cross-Section: Strike Lines and Dip LinesDokument13 SeitenStratigraphic Cross-Section: Strike Lines and Dip LinesBonjovi VerdejoNoch keine Bewertungen
- JPB - 2016 PDFDokument22 SeitenJPB - 2016 PDFOlfer EduardoNoch keine Bewertungen
- Superposed Deformations and Their Hybrid EffectsDokument20 SeitenSuperposed Deformations and Their Hybrid Effectsqiangeng007100% (1)
- 4355 19761 1 PB - 2 PDFDokument12 Seiten4355 19761 1 PB - 2 PDFNavneet SinghNoch keine Bewertungen
- Response Spectra For Differential Motion of Columns: Mihailo D. Trifunac and Maria I. TodorovskaDokument18 SeitenResponse Spectra For Differential Motion of Columns: Mihailo D. Trifunac and Maria I. TodorovskaMarko AdamovićNoch keine Bewertungen
- Sanderson 2015Dokument12 SeitenSanderson 2015IMVG DatabaseNoch keine Bewertungen
- Joints: Joint Sets and SystemsDokument22 SeitenJoints: Joint Sets and Systemsمحمد باسم محمد حسين ANoch keine Bewertungen
- On The Compression of A CylinderDokument67 SeitenOn The Compression of A CylinderfrankNoch keine Bewertungen
- Barrett 1980Dokument13 SeitenBarrett 1980María Emilia TorresNoch keine Bewertungen
- Osgoui Et Al. 2017 - WTCDokument10 SeitenOsgoui Et Al. 2017 - WTCReza OsgouiNoch keine Bewertungen
- Joints: Joint Sets and SystemsDokument22 SeitenJoints: Joint Sets and SystemsFaizal AkbarNoch keine Bewertungen
- 10.0000@www - Onepetro.org@conference paper@ISRM IS 1981 140 PDFDokument6 Seiten10.0000@www - Onepetro.org@conference paper@ISRM IS 1981 140 PDFrNoch keine Bewertungen
- Elmo 2014Dokument13 SeitenElmo 2014rNoch keine Bewertungen
- 69 Palmstrom On Jointing MeasurementsDokument40 Seiten69 Palmstrom On Jointing MeasurementsluizcpassosNoch keine Bewertungen
- Calculation The Spacing of Discontinuities From 3D Point CloudsDokument9 SeitenCalculation The Spacing of Discontinuities From 3D Point CloudsrNoch keine Bewertungen
- 69 Palmstrom On Jointing MeasurementsDokument40 Seiten69 Palmstrom On Jointing MeasurementsluizcpassosNoch keine Bewertungen
- Identification of Rock Slope Discontinuity Sets From Laser Scanner and Photogrammetric Point Clouds: A Comparative AnalysisDokument8 SeitenIdentification of Rock Slope Discontinuity Sets From Laser Scanner and Photogrammetric Point Clouds: A Comparative Analysisgia26Noch keine Bewertungen
- Analysis of A Rock Slide Stabilized With A Toe-Berm: A Case Study in British Columbia, CanadaDokument13 SeitenAnalysis of A Rock Slide Stabilized With A Toe-Berm: A Case Study in British Columbia, CanadarNoch keine Bewertungen
- Convvra: A Center of Excellence in Earth Sciences and EngineeringDokument22 SeitenConvvra: A Center of Excellence in Earth Sciences and EngineeringrNoch keine Bewertungen
- Fault in IranDokument1 SeiteFault in IranrNoch keine Bewertungen
- Pitwall Stability Analysis-Case StudiesDokument6 SeitenPitwall Stability Analysis-Case StudiesrNoch keine Bewertungen
- Convvra: A Center of Excellence in Earth Sciences and EngineeringDokument22 SeitenConvvra: A Center of Excellence in Earth Sciences and EngineeringrNoch keine Bewertungen
- Rubin 1995Dokument50 SeitenRubin 1995r100% (1)
- Determination Rock Quality Designation RQD Basis On Joints: January 2011Dokument6 SeitenDetermination Rock Quality Designation RQD Basis On Joints: January 2011rNoch keine Bewertungen
- Analysis of A Rock Slide Stabilized With A Toe-Berm: A Case Study in British Columbia, CanadaDokument13 SeitenAnalysis of A Rock Slide Stabilized With A Toe-Berm: A Case Study in British Columbia, CanadarNoch keine Bewertungen
- InSAR Kiruna Presentation ISMS 2016 0Dokument19 SeitenInSAR Kiruna Presentation ISMS 2016 0rNoch keine Bewertungen
- Shen2011 PDFDokument7 SeitenShen2011 PDFrNoch keine Bewertungen
- Jurnal Non-Linier Shear Strength Reduction PDFDokument11 SeitenJurnal Non-Linier Shear Strength Reduction PDFAmbarr SutantiNoch keine Bewertungen
- Weak RocksDokument20 SeitenWeak RocksrNoch keine Bewertungen
- El Teniente HormazabalpaperDokument13 SeitenEl Teniente HormazabalpaperMariaMonicaNoch keine Bewertungen
- Three-Dimensional Strength-Reduction Finite Element Analysis of Slopes: Geometric EffectsDokument15 SeitenThree-Dimensional Strength-Reduction Finite Element Analysis of Slopes: Geometric EffectsrNoch keine Bewertungen
- Chinnery 1966 FaultsDokument16 SeitenChinnery 1966 FaultsrNoch keine Bewertungen
- Gravitational Stresses in Anisotropic Rock Masses With Inclined StrataDokument12 SeitenGravitational Stresses in Anisotropic Rock Masses With Inclined StratarNoch keine Bewertungen
- Rock Slope Stability AnalysesDokument10 SeitenRock Slope Stability AnalysesabidishaqaliNoch keine Bewertungen
- Three-Dimensional Strength-Reduction Finite Element Analysis of Slopes: Geometric EffectsDokument15 SeitenThree-Dimensional Strength-Reduction Finite Element Analysis of Slopes: Geometric EffectsrNoch keine Bewertungen
- High WallDokument13 SeitenHigh WallrockyminNoch keine Bewertungen
- Men and 2010 DykesDokument12 SeitenMen and 2010 DykesrNoch keine Bewertungen
- Rubin 1995Dokument50 SeitenRubin 1995r100% (1)
- Park 2001 WedegeDokument19 SeitenPark 2001 WedegerNoch keine Bewertungen
- Transpetional CinematicsDokument15 SeitenTranspetional CinematicsrNoch keine Bewertungen
- Dershowitz 1988Dokument31 SeitenDershowitz 1988rNoch keine Bewertungen
- Valv MarwinDokument15 SeitenValv MarwinNestor OliNoch keine Bewertungen
- NOTES Genchem 2 Lesson 6 Phase Diagram of Water and Carbon DioxideDokument8 SeitenNOTES Genchem 2 Lesson 6 Phase Diagram of Water and Carbon DioxidestephniedayaoNoch keine Bewertungen
- Report 2012 - DPT - Chemical - Engineering - USC PDFDokument57 SeitenReport 2012 - DPT - Chemical - Engineering - USC PDFJuberthArmandoBuitragoNoch keine Bewertungen
- Conics 2Dokument8 SeitenConics 2Boy ShahNoch keine Bewertungen
- Chapter 7 Shaft AlignmentDokument29 SeitenChapter 7 Shaft Alignmentعبدالحافظ زايدNoch keine Bewertungen
- 17 Capacitors and Inductors in AC CircuitsDokument12 Seiten17 Capacitors and Inductors in AC CircuitsAbhijit PattnaikNoch keine Bewertungen
- 5 V, 12-Bit, Serial 3.8 ADC in 8-Pin Package: Ms Conversion TimeDokument13 Seiten5 V, 12-Bit, Serial 3.8 ADC in 8-Pin Package: Ms Conversion TimeHrushi KesanNoch keine Bewertungen
- Basf Processing Styrinic Polymers and CopolymersDokument14 SeitenBasf Processing Styrinic Polymers and CopolymersTejender SinghNoch keine Bewertungen
- Comparison of Heald Frame Motion Generated by Rotary Dobby and Crank & Cam Shedding MotionsDokument6 SeitenComparison of Heald Frame Motion Generated by Rotary Dobby and Crank & Cam Shedding MotionsKannan KumarNoch keine Bewertungen
- Fundatii Turbine EolieneDokument8 SeitenFundatii Turbine EolieneTudor PopNoch keine Bewertungen
- Aashto T350Dokument89 SeitenAashto T350werku koshe0% (1)
- Wave Motion Demonstrator: Instruction ManualDokument17 SeitenWave Motion Demonstrator: Instruction ManualScience HouseNoch keine Bewertungen
- Murray Leinster - Sidewise in TimeDokument25 SeitenMurray Leinster - Sidewise in Timemiquester50% (2)
- Assignment 1 - Magnetic CircuitsDokument4 SeitenAssignment 1 - Magnetic CircuitsPravish Zeus100% (1)
- Raksasa CVDokument5 SeitenRaksasa CVLydia Febriana SimanjuntakNoch keine Bewertungen
- Service Manual Kaeser SK 19Dokument75 SeitenService Manual Kaeser SK 19Joe100% (8)
- A Mini Project ReportDokument37 SeitenA Mini Project ReportChintuu Sai100% (2)
- Regular Solution TheoryDokument4 SeitenRegular Solution TheoryLouie G NavaltaNoch keine Bewertungen
- Classification of Elements and Periodicity in PropertiesDokument2 SeitenClassification of Elements and Periodicity in PropertiesShivam KumarNoch keine Bewertungen
- R05410403 OpticalcommunicationsDokument8 SeitenR05410403 Opticalcommunications9010469071Noch keine Bewertungen
- Zhang 2007 J. Electrochem. Soc. 154 A910 PDFDokument8 SeitenZhang 2007 J. Electrochem. Soc. 154 A910 PDFPeterNoch keine Bewertungen
- Fan 7316Dokument21 SeitenFan 7316sontuyet82Noch keine Bewertungen
- PT Flash Handout 2010Dokument24 SeitenPT Flash Handout 2010Zahraa DakihlNoch keine Bewertungen
- Heat Transfer ProDokument7 SeitenHeat Transfer ProBorse RajNoch keine Bewertungen
- SOPs For ChemicalsDokument7 SeitenSOPs For ChemicalselizasunderNoch keine Bewertungen
- Wind Loads Calculation Eurocode1Dokument1 SeiteWind Loads Calculation Eurocode1Karthik KrishNoch keine Bewertungen
- Thermal Stress MonitoringDokument78 SeitenThermal Stress MonitoringSIVA KAVYANoch keine Bewertungen
- Vectors 05 Notes PDFDokument21 SeitenVectors 05 Notes PDFADSaksoulNoch keine Bewertungen
- BiwaveletDokument29 SeitenBiwaveletThiago MelquíadesNoch keine Bewertungen
- Measuring Speech Intelegibility Using DiracDokument30 SeitenMeasuring Speech Intelegibility Using DiracAndresScribd2014Noch keine Bewertungen
- Green Roofs, Facades, and Vegetative Systems: Safety Aspects in the StandardsVon EverandGreen Roofs, Facades, and Vegetative Systems: Safety Aspects in the StandardsNoch keine Bewertungen
- To Engineer Is Human: The Role of Failure in Successful DesignVon EverandTo Engineer Is Human: The Role of Failure in Successful DesignBewertung: 4 von 5 Sternen4/5 (137)
- Pocket Guide to Flanges, Fittings, and Piping DataVon EverandPocket Guide to Flanges, Fittings, and Piping DataBewertung: 3.5 von 5 Sternen3.5/5 (22)
- Marine Structural Design CalculationsVon EverandMarine Structural Design CalculationsBewertung: 4.5 von 5 Sternen4.5/5 (13)
- Carpentry Made Easy - The Science and Art of Framing - With Specific Instructions for Building Balloon Frames, Barn Frames, Mill Frames, Warehouses, Church SpiresVon EverandCarpentry Made Easy - The Science and Art of Framing - With Specific Instructions for Building Balloon Frames, Barn Frames, Mill Frames, Warehouses, Church SpiresBewertung: 1 von 5 Sternen1/5 (2)
- Advanced Modelling Techniques in Structural DesignVon EverandAdvanced Modelling Techniques in Structural DesignBewertung: 5 von 5 Sternen5/5 (3)
- Structural Cross Sections: Analysis and DesignVon EverandStructural Cross Sections: Analysis and DesignBewertung: 4.5 von 5 Sternen4.5/5 (19)
- Structural Steel Design to Eurocode 3 and AISC SpecificationsVon EverandStructural Steel Design to Eurocode 3 and AISC SpecificationsNoch keine Bewertungen
- Pile Design and Construction Rules of ThumbVon EverandPile Design and Construction Rules of ThumbBewertung: 4.5 von 5 Sternen4.5/5 (15)
- Climate Adaptation Engineering: Risks and Economics for Infrastructure Decision-MakingVon EverandClimate Adaptation Engineering: Risks and Economics for Infrastructure Decision-MakingNoch keine Bewertungen
- Flow-Induced Vibrations: Classifications and Lessons from Practical ExperiencesVon EverandFlow-Induced Vibrations: Classifications and Lessons from Practical ExperiencesTomomichi NakamuraBewertung: 4.5 von 5 Sternen4.5/5 (4)
- Bridge Engineering: Classifications, Design Loading, and Analysis MethodsVon EverandBridge Engineering: Classifications, Design Loading, and Analysis MethodsBewertung: 4 von 5 Sternen4/5 (16)
- Engineering for Kids: Building and Construction Fun | Children's Engineering BooksVon EverandEngineering for Kids: Building and Construction Fun | Children's Engineering BooksBewertung: 3 von 5 Sternen3/5 (2)
- Transmission Pipeline Calculations and Simulations ManualVon EverandTransmission Pipeline Calculations and Simulations ManualBewertung: 4.5 von 5 Sternen4.5/5 (10)
- Advanced Design Examples of Seismic Retrofit of StructuresVon EverandAdvanced Design Examples of Seismic Retrofit of StructuresBewertung: 1 von 5 Sternen1/5 (1)