Das könnte Ihnen auch gefallen
- ME-603 SpringsDokument15 SeitenME-603 Springskanaktanu54Noch keine Bewertungen
- Closed Coiled Helical Springs Subjected To Axial LoadsDokument6 SeitenClosed Coiled Helical Springs Subjected To Axial LoadsSnehasish Ishar100% (1)
- Lab Session 2 MomDokument7 SeitenLab Session 2 Momm.sheraz malikNoch keine Bewertungen
- Helical Spring RevisedDokument5 SeitenHelical Spring RevisedJubaer RabbyNoch keine Bewertungen
- Lab Session 3Dokument7 SeitenLab Session 3m.sheraz malikNoch keine Bewertungen
- MD SpringDokument19 SeitenMD Springiftikhar ahmedNoch keine Bewertungen
- Me-331 Design of Machine Elements Unit V Design of SpringsDokument18 SeitenMe-331 Design of Machine Elements Unit V Design of SpringsMuthuvel MNoch keine Bewertungen
- General Application To Elastic Materials: AM2540 Spring Sti Ness Test AM 2540: Strength of Materials LaboratoryDokument17 SeitenGeneral Application To Elastic Materials: AM2540 Spring Sti Ness Test AM 2540: Strength of Materials LaboratoryAditya KoutharapuNoch keine Bewertungen
- SM II 1Dokument128 SeitenSM II 1lokesh.ecb2658Noch keine Bewertungen
- Strength of Materials Lecture NotesDokument37 SeitenStrength of Materials Lecture NotesAmit SinghNoch keine Bewertungen
- Static Mechanical System Section1: Stress, Shear Force and Bending MomentDokument17 SeitenStatic Mechanical System Section1: Stress, Shear Force and Bending MomentHadhi Hassan KhanNoch keine Bewertungen
- Lab Session 4 MomDokument5 SeitenLab Session 4 Momm.sheraz malikNoch keine Bewertungen
- Design of Springs PDFDokument54 SeitenDesign of Springs PDFDhruv PancholiNoch keine Bewertungen
- MMT I Lab#07Dokument5 SeitenMMT I Lab#07Abdul WahabNoch keine Bewertungen
- Strength of MaterialDokument163 SeitenStrength of MaterialJackKiaNoch keine Bewertungen
- Design of SpringsDokument36 SeitenDesign of Springsvaibhav kuchekarNoch keine Bewertungen
- TorsionDokument18 SeitenTorsionBhupesh GoyalNoch keine Bewertungen
- Close Coiled Helical SpringDokument4 SeitenClose Coiled Helical SpringBaibhav Mohanty67% (3)
- Spring PDFDokument28 SeitenSpring PDFselvarajumit0% (1)
- CE8395 Solid MechanicsDokument4 SeitenCE8395 Solid Mechanics26 MaheshkannanNoch keine Bewertungen
- Design of SpringsDokument116 SeitenDesign of SpringsIvica GNoch keine Bewertungen
- SOM 2 Lecture Notes PDFDokument163 SeitenSOM 2 Lecture Notes PDFRajiv KrishnaNoch keine Bewertungen
- Design of SpringsDokument30 SeitenDesign of SpringsKunal Ahiwale100% (1)
- Helical Springs - Design and SelectionDokument2 SeitenHelical Springs - Design and SelectionCarlos Ediver Arias RestrepoNoch keine Bewertungen
- Springs 2nd-TermDokument10 SeitenSprings 2nd-TermCarl John MantacNoch keine Bewertungen
- Code G - Stiffness of Spring: Measurement of Bending Stress Using Strain GuageDokument9 SeitenCode G - Stiffness of Spring: Measurement of Bending Stress Using Strain GuageDeepak KumarNoch keine Bewertungen
- SM 04 Spring Short PDFDokument2 SeitenSM 04 Spring Short PDFdddddddddNoch keine Bewertungen
- SM IiDokument81 SeitenSM Iimaddys58Noch keine Bewertungen
- SM Lab ManualDokument7 SeitenSM Lab ManualSakib 31Noch keine Bewertungen
- EGR 236 Lab 10 Helical Spring TestDokument3 SeitenEGR 236 Lab 10 Helical Spring TestBahah Tyty100% (2)
- Institute of Engineering Thapathali Campus: A Lab Report On Deflection of BeamsDokument17 SeitenInstitute of Engineering Thapathali Campus: A Lab Report On Deflection of BeamsBarun ShresthaNoch keine Bewertungen
- Column Stability SupportsDokument46 SeitenColumn Stability SupportsAdron Lim0% (1)
- Strength of MaterialsDokument17 SeitenStrength of MaterialskalpanaNoch keine Bewertungen
- MM-II LabDokument55 SeitenMM-II LabSadiaNoch keine Bewertungen
- Rigid Frames - Compression & Buckling: NotationDokument12 SeitenRigid Frames - Compression & Buckling: Notationdarebusi1Noch keine Bewertungen
- MM 3rd Lab ReportDokument9 SeitenMM 3rd Lab ReportIbrahim AfridiNoch keine Bewertungen
- Department of Civil Engineering Lab Manual OF Structural Analysis-Ii (Ece-305)Dokument30 SeitenDepartment of Civil Engineering Lab Manual OF Structural Analysis-Ii (Ece-305)doktorterNoch keine Bewertungen
- Buckling of ColumnDokument7 SeitenBuckling of ColumnDilan IndikaNoch keine Bewertungen
- Design of Helical SpringsDokument60 SeitenDesign of Helical SpringsKelvin Kindice MapurisaNoch keine Bewertungen
- Second Moment of AreaDokument9 SeitenSecond Moment of AreaPham Cao ThanhNoch keine Bewertungen
- Design of Springs (Course-Notes)Dokument112 SeitenDesign of Springs (Course-Notes)mOchONoch keine Bewertungen
- Aircraft Structures - II 2 Mark by Nambi RajanDokument10 SeitenAircraft Structures - II 2 Mark by Nambi RajanNambi RajanNoch keine Bewertungen
- Design of Helical and Leaf SpringsDokument92 SeitenDesign of Helical and Leaf Springs208W1A1027Sec-A LINGAMANENI KOWSHIKNoch keine Bewertungen
- Chapter 03 Design Lever.Dokument15 SeitenChapter 03 Design Lever.rajendra20Noch keine Bewertungen
- Lab Experiment 1: Buckling of ColumnsDokument14 SeitenLab Experiment 1: Buckling of Columnsabhishek kumarNoch keine Bewertungen
- BeamDokument19 SeitenBeamAnoushka BansalNoch keine Bewertungen
- SEE-402 1st PracticalDokument4 SeitenSEE-402 1st PracticalimranakhtarNoch keine Bewertungen
- SA Lab ManualDokument32 SeitenSA Lab ManualAnonymous nSvmh3s67% (3)
- Members Subjected To Torsional LoadsDokument8 SeitenMembers Subjected To Torsional LoadsRahulkumarchauhanNoch keine Bewertungen
- 23AE60R01 Expt5 AerospaceStructuresLaboratoryDokument8 Seiten23AE60R01 Expt5 AerospaceStructuresLaboratorySuhasNoch keine Bewertungen
- Spring DesignDokument17 SeitenSpring DesignabasNoch keine Bewertungen
- Bending Moment For MechatronicsDokument14 SeitenBending Moment For MechatronicsMorapedi D. KealebogaNoch keine Bewertungen
- Phy ProjectDokument5 SeitenPhy ProjectSiddharthNoch keine Bewertungen
- Chapter 2 Lecture NoteDokument19 SeitenChapter 2 Lecture NoteeyobNoch keine Bewertungen
- ME-329 - Mechanical Vibrations: Dated: 16 March, 2021Dokument41 SeitenME-329 - Mechanical Vibrations: Dated: 16 March, 2021Muhammad Junaid JahangirNoch keine Bewertungen
- Spring DesignDokument112 SeitenSpring Designchshbt80% (5)
- Stress Analysis Problems in S.I. Units: The Commonwealth and International Library: Mechanical Engineering DivisionVon EverandStress Analysis Problems in S.I. Units: The Commonwealth and International Library: Mechanical Engineering DivisionBewertung: 2.5 von 5 Sternen2.5/5 (4)
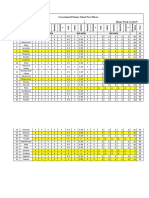
- Government Primary School No.2 Shewa: Class: 3 Diagnostic Test: Nov 2020 Class %:51.82Dokument1 SeiteGovernment Primary School No.2 Shewa: Class: 3 Diagnostic Test: Nov 2020 Class %:51.82sher shahNoch keine Bewertungen
- Government Primary School No 2 Home WorkDokument2 SeitenGovernment Primary School No 2 Home Worksher shahNoch keine Bewertungen
- Government Primary School No.2 Shewa Class: 3rd Test (Feb) Class Percentage: 49.0625Dokument2 SeitenGovernment Primary School No.2 Shewa Class: 3rd Test (Feb) Class Percentage: 49.0625sher shahNoch keine Bewertungen
- Instrument DetailsDokument1 SeiteInstrument Detailssher shahNoch keine Bewertungen
- Gradation Chart22Dokument1 SeiteGradation Chart22sher shahNoch keine Bewertungen
- Lab 6 (BESE 25A)Dokument6 SeitenLab 6 (BESE 25A)sher shahNoch keine Bewertungen
- Water: Safe Drinking Water Saves Lives, and Fortunately, Technologies To Deliver It ToDokument5 SeitenWater: Safe Drinking Water Saves Lives, and Fortunately, Technologies To Deliver It Tosher shahNoch keine Bewertungen
- Case Incident 2Dokument3 SeitenCase Incident 2sher shah83% (6)
- Road Cross Sectional ElementsDokument7 SeitenRoad Cross Sectional Elementssher shahNoch keine Bewertungen
- 2004 & Project Was Completed: Building ConstructionDokument1 Seite2004 & Project Was Completed: Building Constructionsher shahNoch keine Bewertungen
- Case StudyDokument1 SeiteCase Studysher shahNoch keine Bewertungen
- Case Study: Zeeshan Ahmad Onais AnwarDokument11 SeitenCase Study: Zeeshan Ahmad Onais Anwarsher shahNoch keine Bewertungen
- Crash 2022 09 04 - 20.50.22 FMLDokument6 SeitenCrash 2022 09 04 - 20.50.22 FMLFranko Muñoz SepulvedaNoch keine Bewertungen
- ALEXA Metadata White Paper SUP8Dokument29 SeitenALEXA Metadata White Paper SUP8vveksuvarnaNoch keine Bewertungen
- Passport ManualDokument75 SeitenPassport ManualJuhiduhNoch keine Bewertungen
- Cambiar Disco Duro Sony Vaio VPCSBDokument4 SeitenCambiar Disco Duro Sony Vaio VPCSBHarold MartinezNoch keine Bewertungen
- Book Restorer™ Help: InstructionsDokument24 SeitenBook Restorer™ Help: Instructionsramumo5859Noch keine Bewertungen
- Issyll PDFDokument141 SeitenIssyll PDFJwkk AjkNoch keine Bewertungen
- AMD's Dual-GPU, Apple-Only Graphics Card Bests RTX 4080 in Head-to-Head PC MatchupDokument10 SeitenAMD's Dual-GPU, Apple-Only Graphics Card Bests RTX 4080 in Head-to-Head PC Matchupandresgarcia500Noch keine Bewertungen
- Trimax SM-2200 Signal Meter: Satellite Signal Finding Made EasyDokument4 SeitenTrimax SM-2200 Signal Meter: Satellite Signal Finding Made EasyAlexander WieseNoch keine Bewertungen
- The Components of Computer SystemDokument54 SeitenThe Components of Computer SystemMac John Teves Poblete100% (1)
- Electric Actuator EPI2Dokument6 SeitenElectric Actuator EPI2ilkinNoch keine Bewertungen
- CMD Prompt IntroductionDokument2 SeitenCMD Prompt IntroductionMrinal AgarwalNoch keine Bewertungen
- LTBT TM BcmiogDokument170 SeitenLTBT TM BcmiogRicardo RoblesNoch keine Bewertungen
- ADC 2100 Advanced Digital Control REOZD Operation ManualDokument60 SeitenADC 2100 Advanced Digital Control REOZD Operation ManualManuel Otero100% (4)
- Weights 6a FLGDokument10 SeitenWeights 6a FLGAnonymous 48jYxR1CNoch keine Bewertungen
- Type 2 Surge Arrester - VAL-MS 800/30 VF/FM - 2805402: Key Commercial DataDokument10 SeitenType 2 Surge Arrester - VAL-MS 800/30 VF/FM - 2805402: Key Commercial Datapriyanka236Noch keine Bewertungen
- Sony - kdl-46-55-hx920-hx923-hx925 - Az2chassis Service ManualDokument104 SeitenSony - kdl-46-55-hx920-hx923-hx925 - Az2chassis Service ManualObrempong Owusu Manu Agama100% (1)
- Spare Parts List: Origo Mig 400t / Origo Mig 500tDokument15 SeitenSpare Parts List: Origo Mig 400t / Origo Mig 500tvio99usNoch keine Bewertungen
- Verilog TutorialDokument109 SeitenVerilog TutorialRamkumardevendiranDevenNoch keine Bewertungen
- Adesto At25sf041Dokument47 SeitenAdesto At25sf041Joseph Abou El OulaNoch keine Bewertungen
- Exercise Eagle AmpDokument5 SeitenExercise Eagle Ampjiunsien5577Noch keine Bewertungen
- COM 325 Human Computer InterfaceDokument8 SeitenCOM 325 Human Computer InterfaceRay ZamaniNoch keine Bewertungen
- 01 PO - BT1002 - E01 - 1 GPON Technology Introduction 32p - 201308 PDFDokument32 Seiten01 PO - BT1002 - E01 - 1 GPON Technology Introduction 32p - 201308 PDFHanh LeNoch keine Bewertungen
- Library Management System Using QR Code A Project SynopsisDokument13 SeitenLibrary Management System Using QR Code A Project SynopsisSaqlain AjmrtyNoch keine Bewertungen
- Running WeavingDokument50 SeitenRunning WeavingEti ChiranjeeviNoch keine Bewertungen
- DX DiagDokument14 SeitenDX DiagMelissa MorganNoch keine Bewertungen
- CiscoDokument11 SeitenCiscoSudhir MaherwalNoch keine Bewertungen
- ECOVARIO - Series DecodingDokument1 SeiteECOVARIO - Series Decodingtanweer alamNoch keine Bewertungen
- NVQ Knowledge Question Booklet 2013-14 2850Dokument35 SeitenNVQ Knowledge Question Booklet 2013-14 2850Scott Trainor33% (3)
- Ragnarok Prontera Maze 3 GuideDokument3 SeitenRagnarok Prontera Maze 3 Guideandra345Noch keine Bewertungen
- Deployment DiagramDokument6 SeitenDeployment Diagramsudarshan391Noch keine Bewertungen