Das könnte Ihnen auch gefallen
- CTRL Sys Lab ManualDokument46 SeitenCTRL Sys Lab Manualabixek100% (2)
- Lab 05 (Servo)Dokument4 SeitenLab 05 (Servo)hitesh89Noch keine Bewertungen
- Jabalpur Engineering College, Jabalpur Electrical Engineering Department AC/DC Drives Lab. List of ExperimentDokument63 SeitenJabalpur Engineering College, Jabalpur Electrical Engineering Department AC/DC Drives Lab. List of ExperimentSajalNoch keine Bewertungen
- 2142 2 Frequency Response: Semester 5Dokument9 Seiten2142 2 Frequency Response: Semester 5Dwayne JohnsonNoch keine Bewertungen
- Control System Lab ManualDokument52 SeitenControl System Lab ManualMohammad Umar RehmanNoch keine Bewertungen
- Motor 2Dokument49 SeitenMotor 2api-247714257Noch keine Bewertungen
- Me2142-2 Speed/Position Control of A DC Motor: Department of Mechanical Engineering National University of SingaporeDokument9 SeitenMe2142-2 Speed/Position Control of A DC Motor: Department of Mechanical Engineering National University of SingaporeDeepak RainaNoch keine Bewertungen
- Frequency Response Lab Manual Mar 2022Dokument10 SeitenFrequency Response Lab Manual Mar 2022Thant Zaw AungNoch keine Bewertungen
- DC Motor System - Open LoopDokument22 SeitenDC Motor System - Open LoopSivesh SinghNoch keine Bewertungen
- Software Phase Locked LoopDokument7 SeitenSoftware Phase Locked LoopBinyam YohannesNoch keine Bewertungen
- MECHDokument36 SeitenMECHPalak AriwalaNoch keine Bewertungen
- Control Engineering Lab Manual Part 2Dokument11 SeitenControl Engineering Lab Manual Part 2UmerShahzadQurashi100% (1)
- Frequency ResponseDokument10 SeitenFrequency ResponseClementNoch keine Bewertungen
- Exp No 1Dokument9 SeitenExp No 1arooj aslamNoch keine Bewertungen
- Benn Machine Lab ManualDokument14 SeitenBenn Machine Lab ManualRahatullah Khan100% (1)
- Dar Es Salaam Institute of Technology: Department: Module CodeDokument14 SeitenDar Es Salaam Institute of Technology: Department: Module CodeSokoine Hamad DenisNoch keine Bewertungen
- Control System Lab EE-324-FDokument45 SeitenControl System Lab EE-324-FBalraj SinghNoch keine Bewertungen
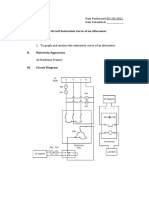
- Open Circuit Saturation Curve of An Alternator I. ObjectivesDokument4 SeitenOpen Circuit Saturation Curve of An Alternator I. ObjectivesArnel Pamaos Lopiba MontañezNoch keine Bewertungen
- Univers'Ity of Science and Technology Bannu: Group MembersDokument23 SeitenUnivers'Ity of Science and Technology Bannu: Group MembersAkmal KhanNoch keine Bewertungen
- Lab 13Dokument9 SeitenLab 13Lûtwàmä JôëNoch keine Bewertungen
- Lab 8a &10a - Modeling of DC Motor: EGR 345 Dynamics System Modeling and ControlDokument8 SeitenLab 8a &10a - Modeling of DC Motor: EGR 345 Dynamics System Modeling and ControledlerandrewNoch keine Bewertungen
- Drives and Control Lab ManualDokument36 SeitenDrives and Control Lab ManualKabilanNoch keine Bewertungen
- Controlling Stepper Motors With A PIC MicrocontrollerDokument16 SeitenControlling Stepper Motors With A PIC Microcontrollervasudeva yasasNoch keine Bewertungen
- Electrical Machines II Lab ManualDokument28 SeitenElectrical Machines II Lab ManualAnith Krishnan83% (6)
- Ge320 Lab2Dokument7 SeitenGe320 Lab2hbuddyNoch keine Bewertungen
- ELEC30x0 Lab8Dokument6 SeitenELEC30x0 Lab8Lûtwàmä JôëNoch keine Bewertungen
- Ac Servo Speed Torque Characteristics Measurement Unit - PREMIERDokument14 SeitenAc Servo Speed Torque Characteristics Measurement Unit - PREMIERAAYUSH KUMARNoch keine Bewertungen
- Control Systems Lab ManualDokument67 SeitenControl Systems Lab ManualRockstar Rich100% (1)
- (P1) Modul DC Motor Speed Control SystemDokument13 Seiten(P1) Modul DC Motor Speed Control SystemTito Bambang Priambodo - 6726Noch keine Bewertungen
- Experiment 1: Simulation of A Three Phase Full Bridge Inverter AIMDokument11 SeitenExperiment 1: Simulation of A Three Phase Full Bridge Inverter AIMSoumiya SrinivasanNoch keine Bewertungen
- Final ManualDokument27 SeitenFinal ManualKameshSontiNoch keine Bewertungen
- CS Lab ManualDokument28 SeitenCS Lab Manualkcop111Noch keine Bewertungen
- Bistable MultivibratorDokument28 SeitenBistable MultivibratorMansi JaisinghNoch keine Bewertungen
- Control System - Lab 2 17-34061-1Dokument8 SeitenControl System - Lab 2 17-34061-1Sakib MahmudNoch keine Bewertungen
- Basic Electronics Lab Exp 4-6-pdf Ayush Anshuman Supakar (118MN0579)Dokument10 SeitenBasic Electronics Lab Exp 4-6-pdf Ayush Anshuman Supakar (118MN0579)Ayush Anshuman SupakarNoch keine Bewertungen
- 6655 Lab ManualDokument160 Seiten6655 Lab ManualNoman Nisar100% (1)
- 03 Triac Analog ControlDokument8 Seiten03 Triac Analog ControlmamamboNoch keine Bewertungen
- Faculty of Engineering Department of Aerospace Engineering: Lab InstructorDokument24 SeitenFaculty of Engineering Department of Aerospace Engineering: Lab InstructorhishamwahidinNoch keine Bewertungen
- Experiment 03Dokument8 SeitenExperiment 03Zeynal Abidin ŞabaşNoch keine Bewertungen
- Exp 7Dokument11 SeitenExp 7John Renzel RiveraNoch keine Bewertungen
- Design of Antiwindup AVR For Synchronous Generator Using Matlab SimulationDokument9 SeitenDesign of Antiwindup AVR For Synchronous Generator Using Matlab SimulationusefiNoch keine Bewertungen
- Ac Servo MotorDokument14 SeitenAc Servo MotorJeyanthNoch keine Bewertungen
- AkhilsinghDokument13 SeitenAkhilsinghalpha kumarNoch keine Bewertungen
- Control System Lab ManualDokument63 SeitenControl System Lab ManualkrishnandrkNoch keine Bewertungen
- DC & AC DrivesDokument12 SeitenDC & AC DrivesPKNoch keine Bewertungen
- Laboratory E-Sources - Second Year B - Tech IV SEM (ECE)Dokument142 SeitenLaboratory E-Sources - Second Year B - Tech IV SEM (ECE)Chen-Wei LiangNoch keine Bewertungen
- Me 2209 Electrical Engineering Lab ManualDokument45 SeitenMe 2209 Electrical Engineering Lab ManualSai Karthi100% (1)
- Control System Lab EE-324-FDokument45 SeitenControl System Lab EE-324-FDheeraj KumarNoch keine Bewertungen
- 0 Lab6 Astable MultivibratorDokument3 Seiten0 Lab6 Astable Multivibratorchandu3072002Noch keine Bewertungen
- Astable MultivibratorDokument3 SeitenAstable MultivibratorTushar GuptaNoch keine Bewertungen
- Experiment 2 - Iduction Motor Drive Using Slip Power RecoveryDokument6 SeitenExperiment 2 - Iduction Motor Drive Using Slip Power RecoveryDeepak BansalNoch keine Bewertungen
- EE380 Lab Experiment 06Dokument6 SeitenEE380 Lab Experiment 06khaled fawazNoch keine Bewertungen
- CONTROL LAB EXP 02 (Open-Loop and Closed-Loop Speed Control of A DC Motor) - ACSDokument8 SeitenCONTROL LAB EXP 02 (Open-Loop and Closed-Loop Speed Control of A DC Motor) - ACSSakib MahmudNoch keine Bewertungen
- Jordan University of Science and Technology: Faculty of Engineering Department of Mechanical EngineeringDokument9 SeitenJordan University of Science and Technology: Faculty of Engineering Department of Mechanical Engineeringmohamed almansiNoch keine Bewertungen
- Machine Manual PDFDokument35 SeitenMachine Manual PDFh1169104Noch keine Bewertungen
- Lab 10Dokument8 SeitenLab 10A. AlghamdiNoch keine Bewertungen
- Control Exp 1 Student ManualDokument5 SeitenControl Exp 1 Student ManualMohammad Bony IsrailNoch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Bewertung: 2.5 von 5 Sternen2.5/5 (3)
- What Is Lock - Type of Lock in DBMSDokument7 SeitenWhat Is Lock - Type of Lock in DBMScompiler&automataNoch keine Bewertungen
- A Low Budget Vector Network Analyser For AF To UHFDokument9 SeitenA Low Budget Vector Network Analyser For AF To UHFgrezmosNoch keine Bewertungen
- General Purpose RegistersDokument3 SeitenGeneral Purpose RegistersAhmed SalamNoch keine Bewertungen
- Sun Fire EOL (End of Life) Servers List - Acclinet Blog - (888) 486-4948Dokument3 SeitenSun Fire EOL (End of Life) Servers List - Acclinet Blog - (888) 486-4948Nitesh KohliNoch keine Bewertungen
- FTC470XETDokument2 SeitenFTC470XETDecebal ScorilloNoch keine Bewertungen
- C Programming UNIT 3.2 ArraysDokument20 SeitenC Programming UNIT 3.2 ArraysrishikaNoch keine Bewertungen
- CMOD Backup, Recovery, and HA-sg246444 PDFDokument384 SeitenCMOD Backup, Recovery, and HA-sg246444 PDFcursocmodNoch keine Bewertungen
- A Project Report On "A Digital Step For ASHA - National Rural Health Mission"Dokument92 SeitenA Project Report On "A Digital Step For ASHA - National Rural Health Mission"NeerajNoch keine Bewertungen
- Ilovepdf MergedDokument1.056 SeitenIlovepdf MergedGITAM Student Life Helpdesk100% (1)
- Chapter 1 - Digital Systems and Information: Logic and Computer Design FundamentalsDokument55 SeitenChapter 1 - Digital Systems and Information: Logic and Computer Design FundamentalsAbbas AlMoussawiNoch keine Bewertungen
- Es35 SW User Manual enDokument18 SeitenEs35 SW User Manual enThái Trung TàiNoch keine Bewertungen
- Parallelized RSA On Multicore CPUs and GPUDokument21 SeitenParallelized RSA On Multicore CPUs and GPUkennedy beyanNoch keine Bewertungen
- SeisImager Installation Instructions v7.5Dokument1 SeiteSeisImager Installation Instructions v7.5Manuel Alejandro Estrada OchoaNoch keine Bewertungen
- Controlwave Integrated Pump Control (2007) PDFDokument6 SeitenControlwave Integrated Pump Control (2007) PDFEnnSeeNoch keine Bewertungen
- Laporan Harian Team IKR September 2017 1Dokument194 SeitenLaporan Harian Team IKR September 2017 1Apri Moko DokoNoch keine Bewertungen
- 002ea Compal LA-4892PDokument45 Seiten002ea Compal LA-4892PichsanNoch keine Bewertungen
- CO322: DS & A (Simple Yet) Efficient Algorithms: Dhammika ElkaduweDokument34 SeitenCO322: DS & A (Simple Yet) Efficient Algorithms: Dhammika ElkaduweMohamaad SihatthNoch keine Bewertungen
- Microlog Setup For Motor Current AnalysisDokument4 SeitenMicrolog Setup For Motor Current AnalysishaziqNoch keine Bewertungen
- Chapter 6 Digital Arithmetic: Operations and CircuitsDokument63 SeitenChapter 6 Digital Arithmetic: Operations and CircuitsHugo Arriagada AlbarranNoch keine Bewertungen
- TP RAT Layer Strategy v4.0 NokiaDokument41 SeitenTP RAT Layer Strategy v4.0 NokiaQasim Abbas AlviNoch keine Bewertungen
- Lab 1 - LED and LDRDokument2 SeitenLab 1 - LED and LDRNishant KumarNoch keine Bewertungen
- Functional Module Based Generic Datasource Part IDokument9 SeitenFunctional Module Based Generic Datasource Part IKuldeep JainNoch keine Bewertungen
- Create Bootable USB Flash Drive To Install Windows 10 - TutorialsDokument2 SeitenCreate Bootable USB Flash Drive To Install Windows 10 - Tutorialsxi siNoch keine Bewertungen
- IBM Storwizw v7.4.x - HW & Driver & OS Support - Jun 2018Dokument176 SeitenIBM Storwizw v7.4.x - HW & Driver & OS Support - Jun 2018mana1345Noch keine Bewertungen
- Jaweria UsmaniDokument1 SeiteJaweria Usmaninishant.bNoch keine Bewertungen
- Beginner Guide Mimic Training Kit Nordbo RoboticsDokument15 SeitenBeginner Guide Mimic Training Kit Nordbo RoboticsCaio AlvesNoch keine Bewertungen
- Roles in Database EnvironmentDokument25 SeitenRoles in Database EnvironmentJustin Rodriguez67% (15)
- Manual ION 7300Dokument8 SeitenManual ION 7300RdOx77Noch keine Bewertungen
- HCI Course Outlines SEDokument3 SeitenHCI Course Outlines SEZubair AhmedNoch keine Bewertungen
- BỘ ĐIỀU CHỈNH ĐIỆN ÁP LOCONTDokument4 SeitenBỘ ĐIỀU CHỈNH ĐIỆN ÁP LOCONTNguyễn Hào QuangNoch keine Bewertungen