Das könnte Ihnen auch gefallen
- Chemical KineticDokument44 SeitenChemical KineticVibhor100% (1)
- 16 - Blending and AgitationDokument20 Seiten16 - Blending and AgitationRafael ReyesNoch keine Bewertungen
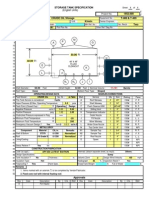
- API 650 Tank Design CalculationDokument8 SeitenAPI 650 Tank Design Calculationmail_younes659283% (29)
- Topics in Engineering Logic: International Series of Monographs on Electronics and InstrumentationVon EverandTopics in Engineering Logic: International Series of Monographs on Electronics and InstrumentationNoch keine Bewertungen
- Cannot Be Located Taxpayers Master List 12152016 PDFDokument78 SeitenCannot Be Located Taxpayers Master List 12152016 PDFHanabishi Rekka100% (1)
- Solution Manual for an Introduction to Equilibrium ThermodynamicsVon EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNoch keine Bewertungen
- Parts List (C40 - C55 Low Cost) CPN PDFDokument76 SeitenParts List (C40 - C55 Low Cost) CPN PDFleandrod28Noch keine Bewertungen
- Calculations For IB ChemistryDokument16 SeitenCalculations For IB Chemistryanthor100% (3)
- CN2116-Unit 7-2022Dokument28 SeitenCN2116-Unit 7-2022Carmen ChanNoch keine Bewertungen
- Chapter 6 PID ControlDokument56 SeitenChapter 6 PID ControlHana Muhammad100% (1)
- Workshop Manual 320 420 620 634Dokument116 SeitenWorkshop Manual 320 420 620 634Henry Hla Khine0% (1)
- CDCCL PresentationDokument41 SeitenCDCCL Presentationrizcst9759100% (5)
- Coal Pulverising in Boilers 1Dokument96 SeitenCoal Pulverising in Boilers 1Babu AravindNoch keine Bewertungen
- Fire Alarm Design PDFDokument19 SeitenFire Alarm Design PDFzafar.ucNoch keine Bewertungen
- Earthing Transformers For Power SystemsDokument11 SeitenEarthing Transformers For Power Systemsanoopk222100% (1)
- Vitalive Hemp Cream CPSRDokument7 SeitenVitalive Hemp Cream CPSRKamran AliNoch keine Bewertungen
- Maquina de Anestesia Pelon Prima - sp2 - Service - ManualDokument110 SeitenMaquina de Anestesia Pelon Prima - sp2 - Service - Manualperla_canto_1Noch keine Bewertungen
- Proportional & Integral Controllers: S K K S E S UDokument25 SeitenProportional & Integral Controllers: S K K S E S UAvik GhoshNoch keine Bewertungen
- Cooling A Pipe Filled With WaterDokument78 SeitenCooling A Pipe Filled With WatervyrgoNoch keine Bewertungen
- Applied Sciences: Discrete-Time First-Order Plus Dead-Time Model-Reference Trade-Off PID Control DesignDokument19 SeitenApplied Sciences: Discrete-Time First-Order Plus Dead-Time Model-Reference Trade-Off PID Control DesignKevin AlexanderNoch keine Bewertungen
- 16 562ln08Dokument9 Seiten16 562ln08sammy wanakaiNoch keine Bewertungen
- Fractional-Order PIDDokument20 SeitenFractional-Order PIDGürkan KAVURANNoch keine Bewertungen
- Co2 Captre and Hydrogen Purification From Synthesis Gas by PsaDokument6 SeitenCo2 Captre and Hydrogen Purification From Synthesis Gas by PsaVũ Duy HưngNoch keine Bewertungen
- An Upwind Leapfrog Scheme For Computational Electromagnetics: CL-FDTDDokument5 SeitenAn Upwind Leapfrog Scheme For Computational Electromagnetics: CL-FDTDAnita AndrianiNoch keine Bewertungen
- CHANG Chunguang, QI Minghao, SONG ZiweiDokument4 SeitenCHANG Chunguang, QI Minghao, SONG ZiweiSanjeet KumarNoch keine Bewertungen
- Numerical Analysis For Real-Time Nonlinear Model Predictive Control (NMPC) of Ethanol Steam ReformersDokument39 SeitenNumerical Analysis For Real-Time Nonlinear Model Predictive Control (NMPC) of Ethanol Steam ReformersRobertNoch keine Bewertungen
- IIT JEE Main Advanced Physical Chemistry 12th Chemical Kinetics PDFDokument44 SeitenIIT JEE Main Advanced Physical Chemistry 12th Chemical Kinetics PDFSesha Sai Kumar50% (4)
- Research On Temperature Control of Heating FurnaceDokument10 SeitenResearch On Temperature Control of Heating FurnaceŠarra MkNoch keine Bewertungen
- Slides Robin AutotuningDokument19 SeitenSlides Robin AutotuningJorge MunozNoch keine Bewertungen
- DKUT - Circuit Network Theory Solved TestDokument4 SeitenDKUT - Circuit Network Theory Solved TestmwangiNoch keine Bewertungen
- EE-211 Linear Circuit Analysis: Dr. Hadeed Ahmed SherDokument27 SeitenEE-211 Linear Circuit Analysis: Dr. Hadeed Ahmed SherHadeedAhmedSherNoch keine Bewertungen
- Transients in D.C. CircuitsDokument10 SeitenTransients in D.C. CircuitsSen DhiranNoch keine Bewertungen
- Applied Thermodynamics ME250: Submitted ToDokument12 SeitenApplied Thermodynamics ME250: Submitted Tomad eye m00dyNoch keine Bewertungen
- 18 A3Dokument3 Seiten18 A3kkdbiggyNoch keine Bewertungen
- Final Exam MockDokument11 SeitenFinal Exam Mockb8vfdrjff6Noch keine Bewertungen
- Formulario+prova+1Dokument1 SeiteFormulario+prova+1Danielle FernandesNoch keine Bewertungen
- Experimental Workshops 2022Dokument5 SeitenExperimental Workshops 2022juanjo_cvNoch keine Bewertungen
- UntitledDokument111 SeitenUntitledkevinchu021195Noch keine Bewertungen
- Heat Transfer. Cooling A Pipe Filled With WaterDokument95 SeitenHeat Transfer. Cooling A Pipe Filled With WaterTech ManagerNoch keine Bewertungen
- 2022-Spring-Fuel Cell Fundamentals - Chap. 2Dokument42 Seiten2022-Spring-Fuel Cell Fundamentals - Chap. 2SangMin ShinNoch keine Bewertungen
- Part 2 CircuitsDokument4 SeitenPart 2 CircuitskhashyapNoch keine Bewertungen
- Curva EspiralDokument1 SeiteCurva EspiralDana GarcíaNoch keine Bewertungen
- 10 Lenoir CycleDokument2 Seiten10 Lenoir Cyclecaptainhass100% (1)
- Slides Robin CADDokument34 SeitenSlides Robin CADJorge MunozNoch keine Bewertungen
- Formula Sheet FinalDokument3 SeitenFormula Sheet FinalNawwafNoch keine Bewertungen
- 1 PID ControllersDokument15 Seiten1 PID ControllersSteven AlexNoch keine Bewertungen
- Thermodynamics Lab: ProjectDokument10 SeitenThermodynamics Lab: ProjectSaAhRaNoch keine Bewertungen
- Rating Calculation For Plate Heat Exchanger Effectiveness and Pressure Drop Using Existing Performance Data PDFDokument10 SeitenRating Calculation For Plate Heat Exchanger Effectiveness and Pressure Drop Using Existing Performance Data PDFFrandhoni UtomoNoch keine Bewertungen
- Rating Calculation For Plate Heat Exchanger Effectiveness and Pressure Drop Using Existing Performance DataDokument10 SeitenRating Calculation For Plate Heat Exchanger Effectiveness and Pressure Drop Using Existing Performance DataFrandhoni UtomoNoch keine Bewertungen
- Sliding Mode Control Based On Fractional Order Calculus For DC-DC ConvertersDokument15 SeitenSliding Mode Control Based On Fractional Order Calculus For DC-DC ConverterssathishNoch keine Bewertungen
- Existence of Solutions For Nonlinear Fractional Differential Equations With Impulses and Anti-Periodic Boundary ConditionsDokument11 SeitenExistence of Solutions For Nonlinear Fractional Differential Equations With Impulses and Anti-Periodic Boundary ConditionsLuis FuentesNoch keine Bewertungen
- 0.1 Simple Pump Model Theory: 0.1.1 Head and Dissipation TermsDokument2 Seiten0.1 Simple Pump Model Theory: 0.1.1 Head and Dissipation TermsJack CavaluzziNoch keine Bewertungen
- University of TripoliDokument16 SeitenUniversity of TripoliSrewaBenshebilNoch keine Bewertungen
- Updated Versions of the Generalized Soave Α-functionDokument12 SeitenUpdated Versions of the Generalized Soave Α-functionSeamus AlaricNoch keine Bewertungen
- (Cowtont Vsuna Roco: R. Pav oDokument4 Seiten(Cowtont Vsuna Roco: R. Pav oHimanshuNoch keine Bewertungen
- On Solving Periodic Riccati Equations: A. VargaDokument27 SeitenOn Solving Periodic Riccati Equations: A. VargaKarad KaradiasNoch keine Bewertungen
- Isothermal Process: Van Der Waals Eos (VDW)Dokument3 SeitenIsothermal Process: Van Der Waals Eos (VDW)Keith Danae SuquibNoch keine Bewertungen
- 7 Limited Pressure CycleDokument4 Seiten7 Limited Pressure CyclecaptainhassNoch keine Bewertungen
- AGA-8 Equations Written by WBDokument3 SeitenAGA-8 Equations Written by WBWaqar BhattiNoch keine Bewertungen
- 3604-Article Text PDF-7362-1-10-20130718Dokument10 Seiten3604-Article Text PDF-7362-1-10-20130718Sayad H AbirNoch keine Bewertungen
- LAB #7 - Section 02 (15:30-18:30) : File Handling, Numpy and Matplotlib in Python (Due: End of The Lab)Dokument3 SeitenLAB #7 - Section 02 (15:30-18:30) : File Handling, Numpy and Matplotlib in Python (Due: End of The Lab)Gloria HuNoch keine Bewertungen
- Propellant Rocket MotorsDokument6 SeitenPropellant Rocket MotorsTomorrow SwamyNoch keine Bewertungen
- Information, Constants, Formulae Information: Theoretical PartDokument10 SeitenInformation, Constants, Formulae Information: Theoretical PartATHAYYA FORTUNANoch keine Bewertungen
- Adobe Scan Feb 13, 2022Dokument11 SeitenAdobe Scan Feb 13, 2022Sakshi SinghNoch keine Bewertungen
- Risk Based Lifetime Assessment of Piping Under Creep-Fatigue ConditionsDokument8 SeitenRisk Based Lifetime Assessment of Piping Under Creep-Fatigue Conditionsmoustafa mahmoudNoch keine Bewertungen
- Q W U H S: Isotérmico DT 0 Isobárico DP 0 Isocórico DV 0 Adiabático DQ 0Dokument2 SeitenQ W U H S: Isotérmico DT 0 Isobárico DP 0 Isocórico DV 0 Adiabático DQ 0Aldasaurio SPNoch keine Bewertungen
- 4 Fuzzy PDFDokument8 Seiten4 Fuzzy PDFMichael Adu-boahenNoch keine Bewertungen
- Problem Set #4 - Mathematics in Population BiologyDokument14 SeitenProblem Set #4 - Mathematics in Population BiologyMario RoseteNoch keine Bewertungen
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Von EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Noch keine Bewertungen
- XXIVth International Congress of Pure and Applied Chemistry: Plenary and Main Section Lectures Presented at Hamburg, Federal Republic of Germany, 2–8 September 1973Von EverandXXIVth International Congress of Pure and Applied Chemistry: Plenary and Main Section Lectures Presented at Hamburg, Federal Republic of Germany, 2–8 September 1973Noch keine Bewertungen
- Critical Survey of Stability Constants of EDTA Complexes: Critical Evaluation of Equilibrium Constants in Solution: Stability Constants of Metal ComplexesVon EverandCritical Survey of Stability Constants of EDTA Complexes: Critical Evaluation of Equilibrium Constants in Solution: Stability Constants of Metal ComplexesNoch keine Bewertungen
- Non Acid Primer 2022Dokument4 SeitenNon Acid Primer 2022Kamran AliNoch keine Bewertungen
- Project ReportDokument4 SeitenProject ReportKamran AliNoch keine Bewertungen
- Black Beauty CPSRDokument10 SeitenBlack Beauty CPSRKamran AliNoch keine Bewertungen
- Cqap - Iqa @ (NS 24.06.22)Dokument26 SeitenCqap - Iqa @ (NS 24.06.22)Kamran AliNoch keine Bewertungen
- 02 - Heat ExchangersDokument88 Seiten02 - Heat ExchangersDana GuerreroNoch keine Bewertungen
- Cassava Pulp As A Biofuel Feedstock of An EnzymatiDokument10 SeitenCassava Pulp As A Biofuel Feedstock of An EnzymatiKamran AliNoch keine Bewertungen
- Homework 10Dokument3 SeitenHomework 10Kamran AliNoch keine Bewertungen
- Hydroenergy (Fluid Machanics)Dokument10 SeitenHydroenergy (Fluid Machanics)Kamran AliNoch keine Bewertungen
- Pso Heat Transfer OilDokument4 SeitenPso Heat Transfer OilKamran AliNoch keine Bewertungen
- Attempt Three Questions: ENGG10033Dokument26 SeitenAttempt Three Questions: ENGG10033Kamran AliNoch keine Bewertungen
- 03 - FractionatorsDokument30 Seiten03 - FractionatorsMuzzamilNoch keine Bewertungen
- 1 RAZOR MD Sandalwood & Musk Beard Balm PIF and CPSRDokument11 Seiten1 RAZOR MD Sandalwood & Musk Beard Balm PIF and CPSRKamran AliNoch keine Bewertungen
- P R O D U C T: Product DescriptionDokument1 SeiteP R O D U C T: Product DescriptionKamran AliNoch keine Bewertungen
- General Information: Krxfrane@Dokument3 SeitenGeneral Information: Krxfrane@Kamran AliNoch keine Bewertungen
- General Information: Krxfrane@Dokument3 SeitenGeneral Information: Krxfrane@Kamran AliNoch keine Bewertungen
- Formulation of CBD Based Botanical Serum: Ingredients PercentageDokument1 SeiteFormulation of CBD Based Botanical Serum: Ingredients PercentageKamran AliNoch keine Bewertungen
- D DR R N: SolutionDokument2 SeitenD DR R N: SolutionKamran AliNoch keine Bewertungen
- Design Concept 3D Cad Modelling Analysis and Optimization: 1. 3D Printing: Fused Deposition ModelingDokument7 SeitenDesign Concept 3D Cad Modelling Analysis and Optimization: 1. 3D Printing: Fused Deposition ModelingKamran AliNoch keine Bewertungen
- Exact ConcentrationDokument1 SeiteExact ConcentrationKamran AliNoch keine Bewertungen
- What Are The Methods Used To Produce The Product?Dokument2 SeitenWhat Are The Methods Used To Produce The Product?Kamran AliNoch keine Bewertungen
- Phenolphthalein-Naoh KineticsDokument8 SeitenPhenolphthalein-Naoh KineticsKamran AliNoch keine Bewertungen
- Exp. 6Dokument10 SeitenExp. 6Kamran AliNoch keine Bewertungen
- Homework 10: SO 4) H 2 S) Log SO 4) H2S) Log SO 4) H2S) SO 4) H 2 SDokument3 SeitenHomework 10: SO 4) H 2 S) Log SO 4) H2S) Log SO 4) H2S) SO 4) H 2 SKamran AliNoch keine Bewertungen
- ParagraphDokument1 SeiteParagraphKamran AliNoch keine Bewertungen
- Exp8-Phenolphthalein NaOH KineticsDokument7 SeitenExp8-Phenolphthalein NaOH KineticsKamran AliNoch keine Bewertungen
- "We Have A Tradition of Being Awesome.": Quadtech ChemicalsDokument9 Seiten"We Have A Tradition of Being Awesome.": Quadtech ChemicalsKamran AliNoch keine Bewertungen
- Exp. 5Dokument6 SeitenExp. 5Kamran AliNoch keine Bewertungen
- Shaping SUEZ 2030 Presentation 20191002 ENDokument58 SeitenShaping SUEZ 2030 Presentation 20191002 ENMohsin ModiNoch keine Bewertungen
- Om MFL67227304-7 PDFDokument92 SeitenOm MFL67227304-7 PDFdan NONINONoch keine Bewertungen
- Selection and Ranking of Rail Vehicle Components For Optimal Lightweighting Using Composite MaterialsDokument14 SeitenSelection and Ranking of Rail Vehicle Components For Optimal Lightweighting Using Composite MaterialsAwan AJaNoch keine Bewertungen
- A Pulse TransformerDokument12 SeitenA Pulse TransformerPooja Uchagaonkar100% (2)
- UNIT 7 Voc - Exercises (11868)Dokument6 SeitenUNIT 7 Voc - Exercises (11868)Аманта ЛиньковаNoch keine Bewertungen
- Magnetic Powder CoresDokument72 SeitenMagnetic Powder Coreszokandza4092Noch keine Bewertungen
- ECE Bubble Power PDFDokument15 SeitenECE Bubble Power PDFsachinsdurgadNoch keine Bewertungen
- Safe OperationDokument1 SeiteSafe OperationM YunusNoch keine Bewertungen
- Honorable Chief Engineer (Thermal) Genco, FaisalabadDokument50 SeitenHonorable Chief Engineer (Thermal) Genco, FaisalabadraowaleedahmadNoch keine Bewertungen
- SpittelauDokument20 SeitenSpittelauFranco PiaggioNoch keine Bewertungen
- Power Electronics LabDokument4 SeitenPower Electronics LabVikram RaoNoch keine Bewertungen
- Cooling DesignDokument46 SeitenCooling DesignDaisy Johnson0% (1)
- Newfound Landing NewspaperDokument22 SeitenNewfound Landing NewspaperAudra ToopNoch keine Bewertungen
- Bee PPT-1Dokument309 SeitenBee PPT-1wondimagegn debebeNoch keine Bewertungen
- Classical Physics Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras Lecture No. # 38Dokument27 SeitenClassical Physics Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras Lecture No. # 38Anonymous 8f2veZfNoch keine Bewertungen
- Laser Heat Treatment of Ti CoatingsDokument48 SeitenLaser Heat Treatment of Ti CoatingsU19ME099 MRINAL MANOJ SVNITNoch keine Bewertungen
- Cased Charges PDFDokument10 SeitenCased Charges PDFhezigrisaroNoch keine Bewertungen
- Atuadores Rotativos Eletromecanicos Com Drive Integrado Serie Tritex - 2Dokument60 SeitenAtuadores Rotativos Eletromecanicos Com Drive Integrado Serie Tritex - 2Alex SouzaNoch keine Bewertungen
- Et IsoDokument4 SeitenEt IsoMizan Sarkar100% (1)
- Chemical Kinetics: The Iodine Clock Reaction: J. CortezDokument6 SeitenChemical Kinetics: The Iodine Clock Reaction: J. CortezKyle CortezNoch keine Bewertungen
- Peripheral Pump: Your Search TermDokument2 SeitenPeripheral Pump: Your Search TermJalil Satria WNoch keine Bewertungen