Das könnte Ihnen auch gefallen
- BeaconirinputcapturemoduleDokument3 SeitenBeaconirinputcapturemoduleapi-398062839Noch keine Bewertungen
- ReloadircapturemoduleDokument3 SeitenReloadircapturemoduleapi-398062839Noch keine Bewertungen
- TapesensorserviceDokument3 SeitenTapesensorserviceapi-398062839Noch keine Bewertungen
- MypwmlibDokument7 SeitenMypwmlibapi-398062839100% (1)
- MotorencodersDokument9 SeitenMotorencodersapi-398062839100% (1)
- LinefollowingsmDokument8 SeitenLinefollowingsmapi-398062839Noch keine Bewertungen
- MotordriveDokument6 SeitenMotordriveapi-398062839Noch keine Bewertungen
- ReloadstatemachineDokument7 SeitenReloadstatemachineapi-398062839100% (1)
- DefenseDokument6 SeitenDefenseapi-398062839Noch keine Bewertungen
- ShootingsmDokument6 SeitenShootingsmapi-398062839Noch keine Bewertungen
- NavtoshootreloadsmDokument4 SeitenNavtoshootreloadsmapi-398062839Noch keine Bewertungen
- FaceoffnavDokument7 SeitenFaceoffnavapi-398062839Noch keine Bewertungen
- Item Cost/Item Quantity Item Subtotal Purchase Location Electronics Batteries, 7.2V NicdDokument1 SeiteItem Cost/Item Quantity Item Subtotal Purchase Location Electronics Batteries, 7.2V Nicdapi-398062839Noch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Thermoplastics Are Defined As Polymers That Can Be Melted and Recast AlmostDokument5 SeitenThermoplastics Are Defined As Polymers That Can Be Melted and Recast AlmostMnemosyneNoch keine Bewertungen
- AKSINDO (Mr. Ferlian), 11 - 13 Mar 2016 (NY)Dokument2 SeitenAKSINDO (Mr. Ferlian), 11 - 13 Mar 2016 (NY)Sunarto HadiatmajaNoch keine Bewertungen
- Educational Institutions: Santos, Sofia Anne PDokument11 SeitenEducational Institutions: Santos, Sofia Anne PApril ManjaresNoch keine Bewertungen
- BM - GoPro Case - Group 6Dokument4 SeitenBM - GoPro Case - Group 6Sandeep NayakNoch keine Bewertungen
- DS ClozapineDokument3 SeitenDS ClozapineMiggsNoch keine Bewertungen
- IRS McqsDokument7 SeitenIRS McqsIbrahimGorgageNoch keine Bewertungen
- Analyzing Text - Yuli RizkiantiDokument12 SeitenAnalyzing Text - Yuli RizkiantiErikaa RahmaNoch keine Bewertungen
- Developing The Tourism Sector in The Sultanate of OmanDokument18 SeitenDeveloping The Tourism Sector in The Sultanate of OmanSalma Al-NamaniNoch keine Bewertungen
- ROSEN Group - Challenging Pipeline DiagnosticsDokument42 SeitenROSEN Group - Challenging Pipeline DiagnosticsFuad0% (1)
- Case Study1: Partnering For Success: Working Together: How Biotech Firms and Large Drug Companies Bring Pharmaceutical Products To MarketDokument2 SeitenCase Study1: Partnering For Success: Working Together: How Biotech Firms and Large Drug Companies Bring Pharmaceutical Products To MarketLakhan SinghNoch keine Bewertungen
- Song FlowDokument4 SeitenSong FlowEhij ZheyNoch keine Bewertungen
- Manusia LemahDokument8 SeitenManusia LemahKhoirul MubinNoch keine Bewertungen
- TDS 39987 Easycoat Profile Decor 3MM Euk GBDokument3 SeitenTDS 39987 Easycoat Profile Decor 3MM Euk GBp4pubgwalyNoch keine Bewertungen
- Brocade MIB ReferenceDokument1.212 SeitenBrocade MIB ReferencejessiwattsNoch keine Bewertungen
- Abdukes App PaoerDokument49 SeitenAbdukes App PaoerAbdulkerim ReferaNoch keine Bewertungen
- Evolve Instagram Marketing Guide - From Zero To 10k PDFDokument132 SeitenEvolve Instagram Marketing Guide - From Zero To 10k PDFAnjit Malviya100% (2)
- ILO Report On Disability and Labour India - 2011wcms - 229259Dokument56 SeitenILO Report On Disability and Labour India - 2011wcms - 229259Vaishnavi JayakumarNoch keine Bewertungen
- Medico Legal CaseDokument2 SeitenMedico Legal CaseskcllbNoch keine Bewertungen
- Fume Cup BrochureDokument2 SeitenFume Cup Brochuremfisol2000Noch keine Bewertungen
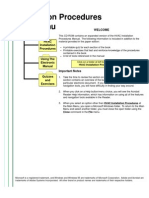
- HVAC Installation ManualDokument215 SeitenHVAC Installation Manualmeeng2014100% (5)
- Department of Education: Wawa Elementary SchoolDokument2 SeitenDepartment of Education: Wawa Elementary SchoolJONATHAN CALAGUINoch keine Bewertungen
- Rockonomics: Book Non-Fiction US & Canada Crown Publishing (Ed. Roger Scholl) UK & Comm John Murray (Ed. Nick Davies)Dokument2 SeitenRockonomics: Book Non-Fiction US & Canada Crown Publishing (Ed. Roger Scholl) UK & Comm John Murray (Ed. Nick Davies)Natasha DanchevskaNoch keine Bewertungen
- Boiler-Water ChemistryDokument94 SeitenBoiler-Water ChemistryPRAG100% (2)
- Pros and Cons of AbortionDokument14 SeitenPros and Cons of AbortionSuman SarekukkaNoch keine Bewertungen
- SQL Interview QuestionsDokument89 SeitenSQL Interview QuestionsVaneet Arora100% (2)
- Volume 1Dokument17 SeitenVolume 1Anant RamNoch keine Bewertungen
- Carnatic Music NotationDokument6 SeitenCarnatic Music Notationksenthil kumar100% (1)
- Paul's Defence of His Apostleship - Gal 1 - 2Dokument13 SeitenPaul's Defence of His Apostleship - Gal 1 - 231songofjoyNoch keine Bewertungen
- SH Case3 Informants enDokument1 SeiteSH Case3 Informants enHoLlamasNoch keine Bewertungen
- Case Study: Direct Selling ConceptDokument20 SeitenCase Study: Direct Selling Conceptbansi2kk0% (1)