Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- System Data: Software For Pulse™ LabshopDokument20 SeitenSystem Data: Software For Pulse™ LabshopshakerNoch keine Bewertungen
- Paper-FPGA Alarm System Based On Multi Temperature SensorDokument13 SeitenPaper-FPGA Alarm System Based On Multi Temperature SensorMuhammad HanzalaNoch keine Bewertungen
- MacBook Repair CaseDokument175 SeitenMacBook Repair CaseHarisolo AndriamahadyNoch keine Bewertungen
- Lab Manual - Experiment 3Dokument6 SeitenLab Manual - Experiment 3Ali Ahmed HassanNoch keine Bewertungen
- A GSM-Based Remote Temperature and Humidity MonitoDokument5 SeitenA GSM-Based Remote Temperature and Humidity Monitoabdulrazaq bibinuNoch keine Bewertungen
- DICO DCC 22414 Chap. 1 To 5 NotesDokument116 SeitenDICO DCC 22414 Chap. 1 To 5 NotesAll most HereNoch keine Bewertungen
- Detecting AI-Synthesized Speech Using Bispectral AnalysisDokument6 SeitenDetecting AI-Synthesized Speech Using Bispectral AnalysisAmol SinhaNoch keine Bewertungen
- 11 Trans Error Code PDFDokument36 Seiten11 Trans Error Code PDFAan WahyudiNoch keine Bewertungen
- Electrical Troubleshooting in Seven StepsDokument9 SeitenElectrical Troubleshooting in Seven StepspetarurosNoch keine Bewertungen
- Product Data: PULSE Sound Quality Software Type 7698Dokument12 SeitenProduct Data: PULSE Sound Quality Software Type 7698jhon vargasNoch keine Bewertungen
- Digital Communication I: Modulation and Coding Course: Spring - 2013 Jeffrey N Denenberg Lecture 1a: Course IntroductionDokument26 SeitenDigital Communication I: Modulation and Coding Course: Spring - 2013 Jeffrey N Denenberg Lecture 1a: Course IntroductionsubuhpramonoNoch keine Bewertungen
- Service Manual: iPF700 SeriesDokument172 SeitenService Manual: iPF700 SeriesblackhaWKfelNoch keine Bewertungen
- Digital Output Module SM 321 DI 32 X AC 120 V (6ES7321-1EL00-0AA0)Dokument3 SeitenDigital Output Module SM 321 DI 32 X AC 120 V (6ES7321-1EL00-0AA0)Fabio CavalheiroNoch keine Bewertungen
- UT Dallas Syllabus For Te3302.001.07f Taught by Andrea Fumagalli (Andreaf)Dokument5 SeitenUT Dallas Syllabus For Te3302.001.07f Taught by Andrea Fumagalli (Andreaf)UT Dallas Provost's Technology GroupNoch keine Bewertungen
- SIP5 APN 023 Change Setting Groups Via CFC enDokument8 SeitenSIP5 APN 023 Change Setting Groups Via CFC enJoeNoch keine Bewertungen
- Quiz Bowl Mock 1819Dokument63 SeitenQuiz Bowl Mock 1819Eugene Embalzado Jr.Noch keine Bewertungen
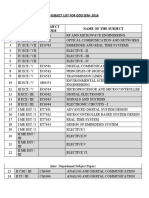
- Subject List For Odd Sem-2016 Class/ SEM Subject Code Name of The SubjectDokument3 SeitenSubject List For Odd Sem-2016 Class/ SEM Subject Code Name of The SubjectRamesh MallaiNoch keine Bewertungen
- EXPERIMENT2Dokument7 SeitenEXPERIMENT2Sanjith PranavNoch keine Bewertungen
- Princom Introduction To Electronic Communication Module 1Dokument2 SeitenPrincom Introduction To Electronic Communication Module 1melwin victoriaNoch keine Bewertungen
- Assignment 1Dokument15 SeitenAssignment 1Manuel MuertoNoch keine Bewertungen
- Solutions For Fluid TechnologyDokument16 SeitenSolutions For Fluid TechnologyVijet BhandiwadNoch keine Bewertungen
- EE301 IIT Kanpur Course Instructor: Dr. Naren Naik Assignment - 1 (22 January 2019)Dokument2 SeitenEE301 IIT Kanpur Course Instructor: Dr. Naren Naik Assignment - 1 (22 January 2019)nithishNoch keine Bewertungen
- Decoding With Hvite: 13.1 Decoder OperationDokument12 SeitenDecoding With Hvite: 13.1 Decoder Operationmb_bhargavaNoch keine Bewertungen
- Departmental Elective III-IV (Responses) - Sheet3Dokument2 SeitenDepartmental Elective III-IV (Responses) - Sheet3lolNoch keine Bewertungen
- Car CraneDokument12 SeitenCar Cranedema_diasNoch keine Bewertungen
- DANEO 400: Hybrid Signal Analyzer For Power Utility Automation SystemsDokument16 SeitenDANEO 400: Hybrid Signal Analyzer For Power Utility Automation SystemsAndrew SetiawanNoch keine Bewertungen
- M62429P - FP - MitshubishiDokument6 SeitenM62429P - FP - MitshubishiStefanoViganóNoch keine Bewertungen
- Technical Information RIA452: Panel MeterDokument16 SeitenTechnical Information RIA452: Panel MeterAhmad AbunassarNoch keine Bewertungen
- Multimedia Digital AudioDokument7 SeitenMultimedia Digital AudioMohammed Abdel Khaleq DwikatNoch keine Bewertungen
- Assignment 2 BE276 Due Date 20 May 2020Dokument3 SeitenAssignment 2 BE276 Due Date 20 May 2020zohaibNoch keine Bewertungen