Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- TheImpairedNurse AnEthicalDilemmaDokument10 SeitenTheImpairedNurse AnEthicalDilemmajamesNoch keine Bewertungen
- Ethical Viewpoints AssignmentDokument4 SeitenEthical Viewpoints AssignmentjamesNoch keine Bewertungen
- Running Head: Legalizing Marijuana For Medical Benefits 1Dokument11 SeitenRunning Head: Legalizing Marijuana For Medical Benefits 1jamesNoch keine Bewertungen
- Report On Tata GroupDokument7 SeitenReport On Tata GroupjamesNoch keine Bewertungen
- Argumentative EssayDokument2 SeitenArgumentative EssayjamesNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- LED Selection Guide 2017 - AV00 0244EN - 072717Dokument130 SeitenLED Selection Guide 2017 - AV00 0244EN - 072717snobic9379Noch keine Bewertungen
- 16 Channel 100 V, 2/ 4 A, 5/3 Level With RTZ, T/R Switch, High-Speed Ultrasound Pulser With Integrated Transmit BeamformerDokument4 Seiten16 Channel 100 V, 2/ 4 A, 5/3 Level With RTZ, T/R Switch, High-Speed Ultrasound Pulser With Integrated Transmit BeamformerPeter PanNoch keine Bewertungen
- Mini Project - TopicsDokument9 SeitenMini Project - TopicsVinshith Vinu100% (1)
- JVC 45Dokument33 SeitenJVC 45Pravin Mevada100% (1)
- Chapter 222 LabviewDokument65 SeitenChapter 222 LabviewRahul Virmani100% (1)
- TLE - Computer Systems Servicing 9 ThirdDokument4 SeitenTLE - Computer Systems Servicing 9 ThirdFlorinda GagasaNoch keine Bewertungen
- Billetero BL-700-USD4Dokument2 SeitenBilletero BL-700-USD4Diego Alejandro GomezNoch keine Bewertungen
- Resistance Welding - Amada Miyachi CoDokument5 SeitenResistance Welding - Amada Miyachi CoJoel BrasilBorgesNoch keine Bewertungen
- Idt Fs1012-Datasheet DST 20181119Dokument9 SeitenIdt Fs1012-Datasheet DST 20181119thinh nguyenNoch keine Bewertungen
- TPC8129 TPC8129 TPC8129 TPC8129: Mosfets Silicon P-Channel MOS (U-MOS )Dokument9 SeitenTPC8129 TPC8129 TPC8129 TPC8129: Mosfets Silicon P-Channel MOS (U-MOS )Sergio MuriloNoch keine Bewertungen
- 70282e PDFDokument262 Seiten70282e PDFFlavio Miranda GonzalezNoch keine Bewertungen
- Ceramic ResonatorDokument24 SeitenCeramic Resonatordrm1238475Noch keine Bewertungen
- PracticeProbs (5 - 27 - 07) - CMOS Analog ICs PDFDokument70 SeitenPracticeProbs (5 - 27 - 07) - CMOS Analog ICs PDFmyluvahanNoch keine Bewertungen
- UPS DesignDokument47 SeitenUPS DesignHari Kishor100% (3)
- Semiconductor Physics Session 5 (P-N Junction Diode)Dokument8 SeitenSemiconductor Physics Session 5 (P-N Junction Diode)ARITRA SARKARNoch keine Bewertungen
- Hold and Setup Violation and SDFDokument2 SeitenHold and Setup Violation and SDFIlaiyaveni IyanduraiNoch keine Bewertungen
- NotebookDokument2 SeitenNotebookKhay SaadNoch keine Bewertungen
- Active Front End PWM Rectifier ProblemsDokument5 SeitenActive Front End PWM Rectifier Problemsmv1970Noch keine Bewertungen
- How To Program 12F629 With Willem ProgrammerDokument15 SeitenHow To Program 12F629 With Willem ProgrammerCarlos ChirinosNoch keine Bewertungen
- FeS2 160607-2Dokument22 SeitenFeS2 160607-2paulNoch keine Bewertungen
- Literature Review On DC Power SupplyDokument5 SeitenLiterature Review On DC Power Supplyfvdh47rr100% (1)
- CD4015Dokument7 SeitenCD4015Lucilia Dos SantosNoch keine Bewertungen
- Pen Gen AlanDokument16 SeitenPen Gen AlanAin Syamimi KhairuddinNoch keine Bewertungen
- As 88117 Ai C 611D85 Us 1069-3Dokument24 SeitenAs 88117 Ai C 611D85 Us 1069-3Дмитрий ХарлановNoch keine Bewertungen
- Improved Single Stage Grid Connected Solar PV System Using Multilevel InverterDokument6 SeitenImproved Single Stage Grid Connected Solar PV System Using Multilevel InverterFaruq FaruqNoch keine Bewertungen
- A Modular Coaxial Colinear Antenna PDFDokument5 SeitenA Modular Coaxial Colinear Antenna PDFMar CelNoch keine Bewertungen
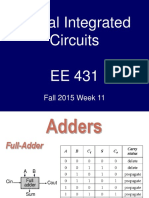
- Digital Integrated Circuits EE 431: Fall 2015 Week 11Dokument23 SeitenDigital Integrated Circuits EE 431: Fall 2015 Week 11Mohamed shabanaNoch keine Bewertungen
- Photo MaskDokument21 SeitenPhoto MaskpraveenNoch keine Bewertungen
- Fully Reused VLSI Architecture of FM0 / Manchester Encoding Using SOLS Technique For DSRC Applications Chapter-1Dokument60 SeitenFully Reused VLSI Architecture of FM0 / Manchester Encoding Using SOLS Technique For DSRC Applications Chapter-1snehaNoch keine Bewertungen