Das könnte Ihnen auch gefallen
- Variable Speed AC Drives with Inverter Output FiltersVon EverandVariable Speed AC Drives with Inverter Output FiltersNoch keine Bewertungen
- Computer Methods in Power Systems Analysis with MATLABVon EverandComputer Methods in Power Systems Analysis with MATLABNoch keine Bewertungen
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsVon EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNoch keine Bewertungen
- Induction Motor Control Through AC DC AC ConverterDokument7 SeitenInduction Motor Control Through AC DC AC ConverterJohn CollinsNoch keine Bewertungen
- Lipo PDFDokument11 SeitenLipo PDFjalilemadiNoch keine Bewertungen
- Magnetic Equivalent Circuit ModelingDokument12 SeitenMagnetic Equivalent Circuit ModelingJavad Rahmany FardNoch keine Bewertungen
- Dynamic Model of Induction Motors for Vector ControlDokument10 SeitenDynamic Model of Induction Motors for Vector ControlMarica RalucaNoch keine Bewertungen
- Electrical Drives Course CodeDokument2 SeitenElectrical Drives Course Coderamkashyap117Noch keine Bewertungen
- Complex Vector Model of The Squirrel Cage Induction Machine Including Instantaneous Rotor Bar CurrentsDokument8 SeitenComplex Vector Model of The Squirrel Cage Induction Machine Including Instantaneous Rotor Bar CurrentsJorge Luis SotoNoch keine Bewertungen
- Induction Machine ModellingDokument23 SeitenInduction Machine ModellingKishan Darji100% (1)
- Emanuel Parzen Modern Probability Theory and Its ApplicationsDokument480 SeitenEmanuel Parzen Modern Probability Theory and Its ApplicationsAlfonzo Orozco100% (1)
- Symmetrical ComponentsDokument8 SeitenSymmetrical Componentssrikanth velpulaNoch keine Bewertungen
- Gams PowerDokument8 SeitenGams PowerarmarulandaNoch keine Bewertungen
- EEE8155 Design and Analysis of Electrical Machines and DrivesDokument13 SeitenEEE8155 Design and Analysis of Electrical Machines and DrivesstephenNoch keine Bewertungen
- Unified Theory of Machine Paper PDFDokument1 SeiteUnified Theory of Machine Paper PDFOladeji Ifedayo RNoch keine Bewertungen
- Determination of Instantaneous Currents and Voltages by Means of Alpha, Beta, and Zero ComponentsDokument8 SeitenDetermination of Instantaneous Currents and Voltages by Means of Alpha, Beta, and Zero ComponentsEmre Özer100% (1)
- Solution To The Positive Real Control Problem For Linear Time-Invariant SystemsDokument13 SeitenSolution To The Positive Real Control Problem For Linear Time-Invariant SystemsRohit GandhiNoch keine Bewertungen
- Athans, M. - The Matrix Mininum Principle (NASA)Dokument23 SeitenAthans, M. - The Matrix Mininum Principle (NASA)benito59olivaresNoch keine Bewertungen
- Simulation of Induction MachinesDokument16 SeitenSimulation of Induction MachinesIfat 'ipeh' FatmawatiNoch keine Bewertungen
- Transient AnalysisDokument16 SeitenTransient Analysisdr_biltNoch keine Bewertungen
- Lecture 4: Transformers: Instructor: Dr. Gleb V. Tcheslavski Contact: Office HoursDokument96 SeitenLecture 4: Transformers: Instructor: Dr. Gleb V. Tcheslavski Contact: Office HoursRachit Khanna100% (1)
- Matrix ExponentialDokument14 SeitenMatrix Exponentialvignesh0617Noch keine Bewertungen
- bjorckLSbSolving Linear Least Squares Problems by Orthogonal Gramschmidt OrthogonalizationDokument21 SeitenbjorckLSbSolving Linear Least Squares Problems by Orthogonal Gramschmidt Orthogonalizationdgh3Noch keine Bewertungen
- Generalized PDFDokument14 SeitenGeneralized PDFgurunathan1414% (7)
- CorrectDokument3 SeitenCorrectapi-3779248Noch keine Bewertungen
- Analysis of An Ac To DC Voltage Source Converter Using PWM With Phase and Amplitude ControlDokument8 SeitenAnalysis of An Ac To DC Voltage Source Converter Using PWM With Phase and Amplitude Controleubis_machado4370Noch keine Bewertungen
- BOOK4 PsDokument128 SeitenBOOK4 Psgoyo2kNoch keine Bewertungen
- Feedback Amplifiers and Oscillators PDFDokument2 SeitenFeedback Amplifiers and Oscillators PDFAmy100% (2)
- Lec9 - Basics of Electric Drives - IMDokument10 SeitenLec9 - Basics of Electric Drives - IMTeofilo DedietroNoch keine Bewertungen
- 4-Electrical Machines PDFDokument32 Seiten4-Electrical Machines PDFRenkak OrNoch keine Bewertungen
- Distribution System Modeling and Analysis Electric 1 284 299Dokument16 SeitenDistribution System Modeling and Analysis Electric 1 284 299Kampret CebongNoch keine Bewertungen
- Convex Programming LecturesDokument212 SeitenConvex Programming LecturespdfeeNoch keine Bewertungen
- 1980 - Stable Adaptive Controller Design, Part II - Proof of Stability (Narendra)Dokument9 Seiten1980 - Stable Adaptive Controller Design, Part II - Proof of Stability (Narendra)ademargcjuniorNoch keine Bewertungen
- White and Woodson PDFDokument330 SeitenWhite and Woodson PDFAnonymous ivCODLhn5Noch keine Bewertungen
- Interior PointDokument213 SeitenInterior PointAnonymous XKlkx7cr2INoch keine Bewertungen
- Tesis KolarDokument423 SeitenTesis KolarCarlos DPNoch keine Bewertungen
- Simulation of electric machines and drive systemsDokument17 SeitenSimulation of electric machines and drive systemsSamuel Alves de SouzaNoch keine Bewertungen
- Inductor Design Methodology for Power ElectronicsDokument6 SeitenInductor Design Methodology for Power ElectronicspedrovilknNoch keine Bewertungen
- MatlabDokument45 SeitenMatlabHamid SiNoch keine Bewertungen
- Transient Stability For IEEE 14 Bus Power System Using Power WorldDokument8 SeitenTransient Stability For IEEE 14 Bus Power System Using Power Worldcristian_miranda_mNoch keine Bewertungen
- Robust Industrial Control Systems: Optimal Design Approach for Polynomial SystemsVon EverandRobust Industrial Control Systems: Optimal Design Approach for Polynomial SystemsNoch keine Bewertungen
- Advanced Power ElectronicsDokument4 SeitenAdvanced Power ElectronicsLinkan PriyadarsiniNoch keine Bewertungen
- Finite-Element Models For Electrical Machines by HennebergerDokument12 SeitenFinite-Element Models For Electrical Machines by HennebergermuhassadiNoch keine Bewertungen
- Three-Phase Induction Motor Dynamic Mathematical ModelDokument3 SeitenThree-Phase Induction Motor Dynamic Mathematical Modelsajs201100% (3)
- Feedback Amplifiers Analysis PDFDokument2 SeitenFeedback Amplifiers Analysis PDFDanNoch keine Bewertungen
- Mechatronics SyllabusDokument41 SeitenMechatronics SyllabusElstonD'cruzNoch keine Bewertungen
- Microcontroller Based Three Phase InverterDokument4 SeitenMicrocontroller Based Three Phase InverterEditor IJRITCCNoch keine Bewertungen
- Articol - Dewan - Rectifier Filter Design PDFDokument7 SeitenArticol - Dewan - Rectifier Filter Design PDFCovaci BogdanNoch keine Bewertungen
- HFSS Field CalculatorDokument34 SeitenHFSS Field Calculatorlevismith_367% (3)
- Assignmnet 02 RevisedDokument3 SeitenAssignmnet 02 RevisedBilal Ayub100% (1)
- Power Electronics in MicrogridDokument28 SeitenPower Electronics in MicrogridSunando MukherjeeNoch keine Bewertungen
- IEEE Transactions On Magnetics Volume 22 Issue 5 1986 (Doi 10.1109 - Tmag.1986.1064466) Sebastian, T. Slemon, G. Rahman, M. - Modelling of Permanent Magnet Synchronous MotorsDokument3 SeitenIEEE Transactions On Magnetics Volume 22 Issue 5 1986 (Doi 10.1109 - Tmag.1986.1064466) Sebastian, T. Slemon, G. Rahman, M. - Modelling of Permanent Magnet Synchronous MotorsmauricetappaNoch keine Bewertungen
- Differential Evolution: A Handbook For Global Permutation-Based Combinatorial OptimizationDokument225 SeitenDifferential Evolution: A Handbook For Global Permutation-Based Combinatorial OptimizationDaniel NunesNoch keine Bewertungen
- CYCLOCONVERTERSDokument46 SeitenCYCLOCONVERTERSHari HaranNoch keine Bewertungen
- Real-Time Simulation Technology for Modern Power ElectronicsVon EverandReal-Time Simulation Technology for Modern Power ElectronicsNoch keine Bewertungen
- Power Electronics Converters and their Control for Renewable Energy ApplicationsVon EverandPower Electronics Converters and their Control for Renewable Energy ApplicationsArezki FekikNoch keine Bewertungen
- High Voltage Direct Current Transmission: Converters, Systems and DC GridsVon EverandHigh Voltage Direct Current Transmission: Converters, Systems and DC GridsNoch keine Bewertungen
- Integration of Green and Renewable Energy in Electric Power SystemsVon EverandIntegration of Green and Renewable Energy in Electric Power SystemsNoch keine Bewertungen
- "Winter Training": A Report OnDokument2 Seiten"Winter Training": A Report OnSuhail Ahmad SuhailNoch keine Bewertungen
- Docslide - Us Variable Frequency TransformerDokument20 SeitenDocslide - Us Variable Frequency TransformerSuhail Ahmad SuhailNoch keine Bewertungen
- MOCT Measures Current Using Faraday EffectDokument21 SeitenMOCT Measures Current Using Faraday EffectSuhail Ahmad SuhailNoch keine Bewertungen
- New Microsoft Word DocumentDokument1 SeiteNew Microsoft Word DocumentSuhail Ahmad SuhailNoch keine Bewertungen
- ABS AND TCS EXPERIMENT MANUALDokument23 SeitenABS AND TCS EXPERIMENT MANUALEncik ArhamNoch keine Bewertungen
- Everything You Need to Know About InvertersDokument11 SeitenEverything You Need to Know About InvertersAmran WiratmaNoch keine Bewertungen
- Mechanical Vibrations of Single DOF SystemsDokument73 SeitenMechanical Vibrations of Single DOF SystemsAli Ahsan 104Noch keine Bewertungen
- Instructions for spare parts list of flameproof circuit-breaker set SN54Dokument11 SeitenInstructions for spare parts list of flameproof circuit-breaker set SN54przilicaNoch keine Bewertungen
- Manning Formula Pipe Flow CalculatorDokument14 SeitenManning Formula Pipe Flow Calculatorchemkumar16Noch keine Bewertungen
- Full Text 01Dokument272 SeitenFull Text 01yahoo1231qNoch keine Bewertungen
- Advanced Mechanics of Solids 925cDokument425 SeitenAdvanced Mechanics of Solids 925cHungryHowls ASMR100% (1)
- Photoelectric EffectDokument1 SeitePhotoelectric EffectA.SheikhNoch keine Bewertungen
- CH 08 SolDokument116 SeitenCH 08 SolmahadevbNoch keine Bewertungen
- DC Motor ModelingDokument2 SeitenDC Motor Modelingkakavietnam9Noch keine Bewertungen
- 0625 w18 QP 43 PDFDokument16 Seiten0625 w18 QP 43 PDFkhalil rehmanNoch keine Bewertungen
- Skin EffectDokument3 SeitenSkin Effectfadrian_jNoch keine Bewertungen
- Special Electrical MachineDokument15 SeitenSpecial Electrical MachineJesse Jones SeraspeNoch keine Bewertungen
- TSWF - 900.2 - Earthing Calculation For 110kV OHTL - Rev2Dokument4 SeitenTSWF - 900.2 - Earthing Calculation For 110kV OHTL - Rev2Shinekhuu99Noch keine Bewertungen
- Automatic Star DeltaDokument43 SeitenAutomatic Star Deltaprabhu rachutiNoch keine Bewertungen
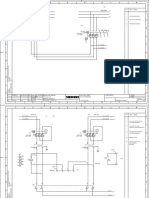
- 10 - +GB03 2de01 Bustie BreakerDokument4 Seiten10 - +GB03 2de01 Bustie BreakerhamzehNoch keine Bewertungen
- A Design Study of Diaphragm Walls: Paper 6Dokument9 SeitenA Design Study of Diaphragm Walls: Paper 6Parthesh pandyaNoch keine Bewertungen
- Spintronics PDFDokument49 SeitenSpintronics PDFGokaran ShuklaNoch keine Bewertungen
- File Folder Bridge PDFDokument230 SeitenFile Folder Bridge PDFAlejandra PradoNoch keine Bewertungen
- HVDokument24 SeitenHVGANGADHARA P KNoch keine Bewertungen
- Symmetrical ComponentsDokument18 SeitenSymmetrical ComponentsrajabasakNoch keine Bewertungen
- Brushless DC Motor Control Using PLCDokument6 SeitenBrushless DC Motor Control Using PLCvuluyen6688Noch keine Bewertungen
- 15KV High Voltage Inverter Generator Spark Arc Ignition Coil Module DIY Kit 3.7VDokument5 Seiten15KV High Voltage Inverter Generator Spark Arc Ignition Coil Module DIY Kit 3.7Vdarkstar314Noch keine Bewertungen
- Lecture8 PDFDokument5 SeitenLecture8 PDFAnkan GayenNoch keine Bewertungen
- Analysis and Design of Flight Vehicles Structures - BruhnDokument817 SeitenAnalysis and Design of Flight Vehicles Structures - BruhnSrinivasan MuthuvelNoch keine Bewertungen
- Measure Unknown Resistance Using Wheatstone BridgeDokument4 SeitenMeasure Unknown Resistance Using Wheatstone BridgeJohn Wang100% (2)
- WS - Physics - GR - 9 Part1Dokument12 SeitenWS - Physics - GR - 9 Part1Abdelrhman AhmedNoch keine Bewertungen
- Chapter 91Dokument37 SeitenChapter 91sscarlett1231Noch keine Bewertungen
- Online Class - XII/2077Dokument9 SeitenOnline Class - XII/2077zoomNoch keine Bewertungen
- Indian Standard: Specification For Electric Ceiling Type Fans and RegulatorsDokument25 SeitenIndian Standard: Specification For Electric Ceiling Type Fans and RegulatorsJai KaranNoch keine Bewertungen