Das könnte Ihnen auch gefallen
- Libro MonfortDokument39 SeitenLibro MonfortAlfredo Diaz Babiano0% (1)
- Manual de Operacion Generador 22 KvaDokument64 SeitenManual de Operacion Generador 22 KvaLuis Lastra100% (1)
- Informe AceroDokument8 SeitenInforme AceroVíctor Delgado RafaelNoch keine Bewertungen
- Unidad 2 ElectricaDokument16 SeitenUnidad 2 ElectricaAnhello Ochoa100% (1)
- Sistemas de CargaDokument35 SeitenSistemas de CargaJosé cubillos100% (3)
- Contaminación de Mercurio en AtunDokument18 SeitenContaminación de Mercurio en AtunRomer Sava0% (1)
- Contaminación de Mercurio en AtunDokument17 SeitenContaminación de Mercurio en AtunRomer SavaNoch keine Bewertungen
- 0000008493.4436FLY - CVB-es0318HQR Premium TPUDokument4 Seiten0000008493.4436FLY - CVB-es0318HQR Premium TPURomer SavaNoch keine Bewertungen
- Recibo de Pago - UNADDokument2 SeitenRecibo de Pago - UNADRomer SavaNoch keine Bewertungen
- Diseño Integral de Plantas Productivas - (DISEÑO INTEGRAL DE PLANTAS PRODUCTIVAS)Dokument2 SeitenDiseño Integral de Plantas Productivas - (DISEÑO INTEGRAL DE PLANTAS PRODUCTIVAS)Romer SavaNoch keine Bewertungen
- Guía de Actividades y Rúbrica de Evaluación - Fase 1 - Identificación Del Problema AnalíticoDokument22 SeitenGuía de Actividades y Rúbrica de Evaluación - Fase 1 - Identificación Del Problema AnalíticoRomer SavaNoch keine Bewertungen
- Prueba de Descarga de Baterías - Enriquez LlaureDokument2 SeitenPrueba de Descarga de Baterías - Enriquez LlaureAlexander Enriquez llaureNoch keine Bewertungen
- Instructivo 134 de Pago de Aguinaldo 2019Dokument3 SeitenInstructivo 134 de Pago de Aguinaldo 2019Mauricio Caballero PérezNoch keine Bewertungen
- Propiedades de La RadiaciónDokument17 SeitenPropiedades de La RadiaciónJoaquín Chiquito0% (1)
- Funciones ComplejasDokument32 SeitenFunciones ComplejaswilmerNoch keine Bewertungen
- Calibracion de Mochila Aspersora (Metodo de Boquilla)Dokument2 SeitenCalibracion de Mochila Aspersora (Metodo de Boquilla)Luis RamosNoch keine Bewertungen
- Cálculo de La Recta Tangente A Dos Circunferencias PDFDokument5 SeitenCálculo de La Recta Tangente A Dos Circunferencias PDFwapytoNoch keine Bewertungen
- Ecuación de SchrödingerDokument12 SeitenEcuación de SchrödingerberthaNoch keine Bewertungen
- ElasticidadDokument35 SeitenElasticidadRogher Bautista BardalesNoch keine Bewertungen
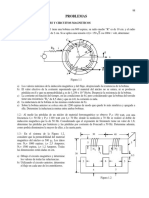
- Problemas: Capitulo 1: Materiales Y Circuitos MagneticosDokument4 SeitenProblemas: Capitulo 1: Materiales Y Circuitos MagneticosClaudio YucraNoch keine Bewertungen
- Distribucion de AguaDokument21 SeitenDistribucion de AguaMaria Elena Avalos PancorboNoch keine Bewertungen
- Unidad 1 Fundamentos MecanicosDokument22 SeitenUnidad 1 Fundamentos MecanicosItza OcañaNoch keine Bewertungen
- Ecuación de NernstDokument3 SeitenEcuación de NernstAndersson Monago MoralesNoch keine Bewertungen
- Reacciones Hetero Gene As Aplicadas A Procesos Metalurgicos1Dokument16 SeitenReacciones Hetero Gene As Aplicadas A Procesos Metalurgicos1Antony WingNoch keine Bewertungen
- III, IV Medio-Dif Física-Teoría Del Big Bang-Parte 1Dokument7 SeitenIII, IV Medio-Dif Física-Teoría Del Big Bang-Parte 1José AlexisNoch keine Bewertungen
- DINÁMICADokument4 SeitenDINÁMICAPablo Santos VilcherrezNoch keine Bewertungen
- Señales de Tránsito y Distancia de FrenadoDokument20 SeitenSeñales de Tránsito y Distancia de FrenadoEdd MaytaNoch keine Bewertungen
- 33-1 Ficha CONST GEOMÉT FUNDDokument2 Seiten33-1 Ficha CONST GEOMÉT FUNDNelson Huaman CasanovaNoch keine Bewertungen
- Práctica 4 Ondas Mecänicas (ESIME CULHUACÄN)Dokument6 SeitenPráctica 4 Ondas Mecänicas (ESIME CULHUACÄN)PholetBazánNoch keine Bewertungen
- Brixómetro para Viticultores PCEDokument6 SeitenBrixómetro para Viticultores PCEIrwin ColoniaNoch keine Bewertungen
- Problemas Unidad 2 Fisica ModernaDokument3 SeitenProblemas Unidad 2 Fisica ModernaGuillermo HernandezNoch keine Bewertungen
- Riesgos EléctricosDokument9 SeitenRiesgos EléctricosNelson RodriguezNoch keine Bewertungen
- LABORATORIO 5 Ensayo Con CargaDokument15 SeitenLABORATORIO 5 Ensayo Con CarganelsonNoch keine Bewertungen
- Autoevalucion 2 Algebra Lineal UNABDokument3 SeitenAutoevalucion 2 Algebra Lineal UNABCarlos CastilloNoch keine Bewertungen
- Inv e 218-07 Resistencia Al Desgaste de Los Agregados de Tamaños Menores de 37Dokument11 SeitenInv e 218-07 Resistencia Al Desgaste de Los Agregados de Tamaños Menores de 37Hoover Andres TrujilloNoch keine Bewertungen
- Tarea1 - Vectores, Matrices y Determinantes - Grupo100408 - 211Dokument56 SeitenTarea1 - Vectores, Matrices y Determinantes - Grupo100408 - 211Cristian BuilesNoch keine Bewertungen