Das könnte Ihnen auch gefallen
- (##) Low Cost Harvesting MachineDokument98 Seiten(##) Low Cost Harvesting MachinemohanNoch keine Bewertungen
- (##) Automatic Clutch and Braking System.Dokument102 Seiten(##) Automatic Clutch and Braking System.mohan100% (1)
- Automatic Parking Braking SystemDokument5 SeitenAutomatic Parking Braking SystemmohanNoch keine Bewertungen
- (##) Auto Clutch For AutomobileDokument83 Seiten(##) Auto Clutch For Automobilemohan100% (1)
- (##) Automatic Tapping & Drilling MachineDokument77 Seiten(##) Automatic Tapping & Drilling Machinemohan100% (1)
- (##) Pneumatic Material Handling RobotDokument6 Seiten(##) Pneumatic Material Handling RobotmohanNoch keine Bewertungen
- (##) Air Compressor Using Crank & Slotted Link MechanismDokument59 Seiten(##) Air Compressor Using Crank & Slotted Link Mechanismmohan100% (2)
- (##) Pneumatic Double Axis JCB ModelDokument8 Seiten(##) Pneumatic Double Axis JCB ModelmohanNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Buku Manual Yamaha MioDokument376 SeitenBuku Manual Yamaha MioAngodi Maniz0% (1)
- Lecture1-2 15852 SpringsDokument160 SeitenLecture1-2 15852 SpringsL.K. Bhagi100% (1)
- SeriesCCatalog CWB FanDokument36 SeitenSeriesCCatalog CWB Fanmarjan 01Noch keine Bewertungen
- BV300 Sopladora Oleo MacDokument2 SeitenBV300 Sopladora Oleo MacLeopoldo PerezNoch keine Bewertungen
- Design and Dynamic Analysis of Landing Gear System in Vertical Takeoff and Vertical Landing Reusable Launch VehicleDokument14 SeitenDesign and Dynamic Analysis of Landing Gear System in Vertical Takeoff and Vertical Landing Reusable Launch Vehicle使徒Noch keine Bewertungen
- Telescopic Direct-Acting-Type DampersDokument3 SeitenTelescopic Direct-Acting-Type DampersjimmyNoch keine Bewertungen
- Rear Spring Harsh Ride: T-SB-0359-10 December 21, 2010Dokument18 SeitenRear Spring Harsh Ride: T-SB-0359-10 December 21, 2010goombaNoch keine Bewertungen
- Car Bibles - The Car Suspension BibleDokument20 SeitenCar Bibles - The Car Suspension BibleAliakbar Saifee100% (1)
- ACE Main-Catalog US-metric 2014Dokument212 SeitenACE Main-Catalog US-metric 2014Maicon ForchesatoNoch keine Bewertungen
- Baja SAE Design ReportDokument8 SeitenBaja SAE Design ReportpronavNoch keine Bewertungen
- Yamaha XT225 1995 ManualDokument389 SeitenYamaha XT225 1995 ManualRyan RobinsonNoch keine Bewertungen
- Damper BoltsDokument1 SeiteDamper BoltsRonald BetancourtNoch keine Bewertungen
- 3 Wheeler FOB Spare Parts Price List - Red Star, Ethiopia - As On 1st Oct 2012Dokument24 Seiten3 Wheeler FOB Spare Parts Price List - Red Star, Ethiopia - As On 1st Oct 2012abrar nurtataNoch keine Bewertungen
- Manual KTM Duke 390 2017 ENGDokument255 SeitenManual KTM Duke 390 2017 ENGFede Levint100% (1)
- K Ninja H2 Owner's & Service Manuals 02Dokument21 SeitenK Ninja H2 Owner's & Service Manuals 02njkawasakiNoch keine Bewertungen
- STRATOS Operational ManualDokument118 SeitenSTRATOS Operational ManualBenjamin Beiler50% (2)
- Theoretical Modeling and Optimal Matching On The Damping (MAIN)Dokument25 SeitenTheoretical Modeling and Optimal Matching On The Damping (MAIN)Rithin mathewNoch keine Bewertungen
- Springs InstallationDokument2 SeitenSprings InstallationEslam MansourNoch keine Bewertungen
- Injection Pump Specification ©: Use Latest Revision For All Referenced DocumentsDokument4 SeitenInjection Pump Specification ©: Use Latest Revision For All Referenced Documentsjohnny sabinNoch keine Bewertungen
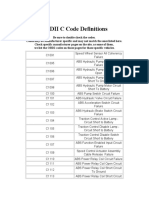
- OBDII C Code DefinitionsDokument23 SeitenOBDII C Code DefinitionspriyonoNoch keine Bewertungen
- Seminar On POWER GENERATING SHOCK ABSORBER - Mechanical Engineering World - Project Ideas - Seminar Topics - E-Books (PDF) - New TrendsDokument5 SeitenSeminar On POWER GENERATING SHOCK ABSORBER - Mechanical Engineering World - Project Ideas - Seminar Topics - E-Books (PDF) - New TrendsRaghuveer S GowdaNoch keine Bewertungen
- Isuzu Trooper Workshop ManualDokument3.573 SeitenIsuzu Trooper Workshop Manualvit otio89% (19)
- Rujukan Contoh ThesisDokument24 SeitenRujukan Contoh Thesiszul khairiNoch keine Bewertungen
- Machete Comp Service GuideDokument28 SeitenMachete Comp Service GuideDeivisson CarvalhoNoch keine Bewertungen
- XV 250Dokument291 SeitenXV 250Muñoz Roaddog Ariel100% (2)
- Kayaba MedidasDokument24 SeitenKayaba MedidasPilar TorquemadaNoch keine Bewertungen
- Shock Absorber Test RigDokument14 SeitenShock Absorber Test RigShani KumarNoch keine Bewertungen
- IRIS Dampers Technical ArticleDokument5 SeitenIRIS Dampers Technical ArticleTanveer AzizNoch keine Bewertungen
- Benelli TNT 899 & 899s User ManualDokument88 SeitenBenelli TNT 899 & 899s User ManualLovas Szabolcs100% (2)
- Analysis of Shock Absorber-FEMDokument20 SeitenAnalysis of Shock Absorber-FEMJunaid IQbalNoch keine Bewertungen