Das könnte Ihnen auch gefallen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- LCD Modification 1Dokument159 SeitenLCD Modification 1Jeank Rivadeneyra89% (19)
- LCD Modification 1Dokument159 SeitenLCD Modification 1Jeank Rivadeneyra89% (19)
- 110 Waveform Generator Projects for the Home ConstructorVon Everand110 Waveform Generator Projects for the Home ConstructorBewertung: 4 von 5 Sternen4/5 (1)
- Instrumentation and Test Gear Circuits ManualVon EverandInstrumentation and Test Gear Circuits ManualBewertung: 5 von 5 Sternen5/5 (1)
- v2 Led LCD Screen Panel Repair MIRKODokument213 Seitenv2 Led LCD Screen Panel Repair MIRKOErRobert Ch96% (25)
- QSC RMX Series 805 1450 2450Dokument42 SeitenQSC RMX Series 805 1450 2450naughtybigboy100% (5)
- Systems - of - EquationsDokument39 SeitenSystems - of - EquationsAnonymous 5aPb088W100% (1)
- SmpsrepairebookDokument105 SeitenSmpsrepairebookJeank Rivadeneyra100% (2)
- Nomad Pro Operator ManualDokument36 SeitenNomad Pro Operator Manualdavid_stephens_29Noch keine Bewertungen
- Prosser The Art of Digital Design 2ed 1987 PDFDokument546 SeitenProsser The Art of Digital Design 2ed 1987 PDFJeank Rivadeneyra100% (3)
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsVon EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsNoch keine Bewertungen
- Reverse Circulation Cementing: The Complete PictureDokument104 SeitenReverse Circulation Cementing: The Complete PictureJoan Corso100% (1)
- (Main 35018086 (3x1) - ICs N501-MSD1306XP - Driv Led N701-OCP8122A OZ9902A-N (24pin) TV Led Konka KDL39-42PS615ATDokument11 Seiten(Main 35018086 (3x1) - ICs N501-MSD1306XP - Driv Led N701-OCP8122A OZ9902A-N (24pin) TV Led Konka KDL39-42PS615ATJeank Rivadeneyra67% (3)
- Panasonic LCD TV Technical Guide 2011Dokument80 SeitenPanasonic LCD TV Technical Guide 2011Jeank RivadeneyraNoch keine Bewertungen
- Siemens Micromaster 440 Manual PDFDokument312 SeitenSiemens Micromaster 440 Manual PDFGustavo Barrera100% (1)
- PioneerDokument60 SeitenPioneerJeank RivadeneyraNoch keine Bewertungen
- Linear IC Applications: A Designer's HandbookVon EverandLinear IC Applications: A Designer's HandbookBewertung: 4 von 5 Sternen4/5 (1)
- Philips bdp2100 wk1304 Ver.1.0Dokument68 SeitenPhilips bdp2100 wk1304 Ver.1.0Jeank RivadeneyraNoch keine Bewertungen
- Optimization of Decarbonization On Steel IndustryDokument28 SeitenOptimization of Decarbonization On Steel Industrymsantosu000Noch keine Bewertungen
- Fisher Paykel SmartLoad Dryer DEGX1, DGGX1 Service ManualDokument70 SeitenFisher Paykel SmartLoad Dryer DEGX1, DGGX1 Service Manualjandre61100% (2)
- Dover Artificial Lift - Hydraulic Lift Jet Pump BrochureDokument8 SeitenDover Artificial Lift - Hydraulic Lift Jet Pump BrochurePedro Antonio Mejia Suarez100% (1)
- Ads 2200 2700 PDFDokument17 SeitenAds 2200 2700 PDFPaul Albu100% (1)
- Mainboard ESC Model P4M800PRO MDokument29 SeitenMainboard ESC Model P4M800PRO MHo Thanh BinhNoch keine Bewertungen
- Service Manual: CD Mechanism Module (S10Mp3)Dokument25 SeitenService Manual: CD Mechanism Module (S10Mp3)roto44Noch keine Bewertungen
- CRT3582 CX-3166Dokument27 SeitenCRT3582 CX-3166Tai HuatNoch keine Bewertungen
- Panasonic Sa-Ht930 Ref-Guide SMDokument23 SeitenPanasonic Sa-Ht930 Ref-Guide SMRichard Kxorroloko100% (1)
- Panasonic TH l24c20dDokument39 SeitenPanasonic TH l24c20dKingsleen33% (3)
- 945GCT/GZT-M: Page Title of SchematicDokument33 Seiten945GCT/GZT-M: Page Title of SchematicJean GaroniNoch keine Bewertungen
- Sony Kdl-32ex402 Chassis Az1-N - 3a-2 PDFDokument73 SeitenSony Kdl-32ex402 Chassis Az1-N - 3a-2 PDFjacques le lay100% (1)
- Diagrama cfd-rg880cpDokument14 SeitenDiagrama cfd-rg880cpMarvin Leon Alegria100% (1)
- Pioneer Cx-3240 Crt4050Dokument31 SeitenPioneer Cx-3240 Crt4050boroda2410Noch keine Bewertungen
- Toyota Audio Component Service Manual CQ-JT1010X CQ-JS6910X Radio With Cassette Tape Player and CDokument42 SeitenToyota Audio Component Service Manual CQ-JT1010X CQ-JS6910X Radio With Cassette Tape Player and CAdan DariasNoch keine Bewertungen
- Pioneer VSX-417 SchematicDokument24 SeitenPioneer VSX-417 SchematicaaakokotNoch keine Bewertungen
- Sony CDX L490bDokument38 SeitenSony CDX L490bJosue RamirezNoch keine Bewertungen
- Pioneer Deh-P770mp, Deh-P7700mp, Deh-P7750mp Service ManualDokument19 SeitenPioneer Deh-P770mp, Deh-P7700mp, Deh-P7750mp Service ManualOssian Valera PinedaNoch keine Bewertungen
- Pioneer Avh-X7780tv crt5694 SM AdditionalDokument2 SeitenPioneer Avh-X7780tv crt5694 SM AdditionalAquino Sound EletrônicaNoch keine Bewertungen
- Service Manual: CDX-L480XDokument20 SeitenService Manual: CDX-L480Xkeremelekika7Noch keine Bewertungen
- Ecs 648fx Sf1 Rev 1.0Dokument34 SeitenEcs 648fx Sf1 Rev 1.0cortes920Noch keine Bewertungen
- 9619 Sanyo LCD-42XF6 Chassis UH4-L Televisor LCD Manual de ServicioDokument50 Seiten9619 Sanyo LCD-42XF6 Chassis UH4-L Televisor LCD Manual de ServicioNatal2i2Noch keine Bewertungen
- Sony CCD TRV Service ManualDokument23 SeitenSony CCD TRV Service ManualPratik GurungNoch keine Bewertungen
- Autoestereo Pioneer DEH-4090MP DEH-6010MPDokument39 SeitenAutoestereo Pioneer DEH-4090MP DEH-6010MPGustavo De la ONoch keine Bewertungen
- Philips MonitorDokument15 SeitenPhilips Monitordstoic1Noch keine Bewertungen
- Revision History: Schematics IndexDokument15 SeitenRevision History: Schematics IndexMark SorianoNoch keine Bewertungen
- Amoi Lc26t1e 32t1e 37t1e 42t1e (ET)Dokument120 SeitenAmoi Lc26t1e 32t1e 37t1e 42t1e (ET)Dimitris ApostolouNoch keine Bewertungen
- L04a Ad 3122785158810Dokument96 SeitenL04a Ad 3122785158810Вячеслав ЖигалкинNoch keine Bewertungen
- Manual Tecnico Parte 06 de 10Dokument49 SeitenManual Tecnico Parte 06 de 10samiNoch keine Bewertungen
- Manual Mother Board Ecs 61Dokument42 SeitenManual Mother Board Ecs 61ajha6775% (4)
- Pioneer VSX 917v K SCHDokument34 SeitenPioneer VSX 917v K SCHiskenderbeyNoch keine Bewertungen
- Manual de Service para TV LED PhilipsDokument108 SeitenManual de Service para TV LED Philipstavillo1980Noch keine Bewertungen
- AVH-X5880TV: CRT5881 DVD Rds Av ReceiverDokument2 SeitenAVH-X5880TV: CRT5881 DVD Rds Av ReceiverRogerio BuenoNoch keine Bewertungen
- Service Manual: Video Camera RecorderDokument19 SeitenService Manual: Video Camera RecorderFilmfoto FilmfotoatyahoocomNoch keine Bewertungen
- Service Manual Chassis 3P1 5: Design and Specifications Are Subject To Change Without Prior Notice. (Only Referrence)Dokument35 SeitenService Manual Chassis 3P1 5: Design and Specifications Are Subject To Change Without Prior Notice. (Only Referrence)marcellobbNoch keine Bewertungen
- Radio Samoch - cqts7421K Toyota Panasonic Matsushita Cq-ts7421k ToyotaDokument37 SeitenRadio Samoch - cqts7421K Toyota Panasonic Matsushita Cq-ts7421k ToyotaJan DettlaffNoch keine Bewertungen
- D120-P2-T (K) Digitizer Installation InstructionsDokument7 SeitenD120-P2-T (K) Digitizer Installation InstructionsFaras AlsaidNoch keine Bewertungen
- Service Manual: FM/MW/LW Compact Disc PlayerDokument12 SeitenService Manual: FM/MW/LW Compact Disc PlayerTiago MouraNoch keine Bewertungen
- Toshiba INVENTEC DAKAR10ABX CS Dk10ABXG 6050A2509701 A01 Schematic DiagramDokument57 SeitenToshiba INVENTEC DAKAR10ABX CS Dk10ABXG 6050A2509701 A01 Schematic DiagramService InfoNoch keine Bewertungen
- Service Manual: Issue Date: 30 November 2004Dokument29 SeitenService Manual: Issue Date: 30 November 2004CapitanSalamiNoch keine Bewertungen
- Noblex TVLCD Modelo 24lc827hDokument41 SeitenNoblex TVLCD Modelo 24lc827hOscar Alberto FernándezNoch keine Bewertungen
- Philips Cd150Dokument39 SeitenPhilips Cd150maneaviorelNoch keine Bewertungen
- Manual de Servicio CCD Trv300eDokument21 SeitenManual de Servicio CCD Trv300edani395arNoch keine Bewertungen
- A49bk RolandDokument19 SeitenA49bk RolandvargasvNoch keine Bewertungen
- Avh-P3380bt AdendoDokument6 SeitenAvh-P3380bt Adendomarcio.balistaNoch keine Bewertungen
- MinimaConstructionGuide R7Dokument65 SeitenMinimaConstructionGuide R7fox7878100% (1)
- Service Manual LCD Television: Model No. LCD-42XF7Dokument50 SeitenService Manual LCD Television: Model No. LCD-42XF7Daniel AvecillaNoch keine Bewertungen
- JD 1354 15 eDokument6 SeitenJD 1354 15 eKuang Ah HockNoch keine Bewertungen
- Features Description: D D D D DDokument19 SeitenFeatures Description: D D D D DClóvis MorNoch keine Bewertungen
- CD Mechanism Module (S11Ipod/Usb)Dokument40 SeitenCD Mechanism Module (S11Ipod/Usb)Chami NdaNoch keine Bewertungen
- Page Title of SchematicDokument40 SeitenPage Title of SchematicXuân TrườngNoch keine Bewertungen
- Brother P-Touch PT-2420PC Parts List PDFDokument16 SeitenBrother P-Touch PT-2420PC Parts List PDFMaxim100Noch keine Bewertungen
- Service Manual: SupplementDokument9 SeitenService Manual: SupplementAlberto MoralesNoch keine Bewertungen
- Training Material of RT49A-LA Chassis 20140612042844457Dokument37 SeitenTraining Material of RT49A-LA Chassis 20140612042844457بوند بوندNoch keine Bewertungen
- Specification of Control Board: (Data Sheet / Version 1.4)Dokument14 SeitenSpecification of Control Board: (Data Sheet / Version 1.4)sme_2010Noch keine Bewertungen
- Radio Shack TRS-80 Expansion Interface: Operator's Manual Catalog Numbers: 26-1140, 26-1141, 26-1142Von EverandRadio Shack TRS-80 Expansion Interface: Operator's Manual Catalog Numbers: 26-1140, 26-1141, 26-1142Noch keine Bewertungen
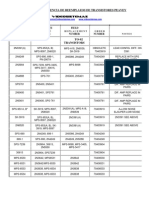
- Guia de Refer en CIA para El Reemplazo de Transistores Peavey - VideosistemasDokument24 SeitenGuia de Refer en CIA para El Reemplazo de Transistores Peavey - VideosistemasGloria Vela0% (1)
- Trans Ac Dc-Converter Eco enDokument33 SeitenTrans Ac Dc-Converter Eco enJeank Rivadeneyra100% (1)
- lc9.3l La 312278518971 100701 PDFDokument108 Seitenlc9.3l La 312278518971 100701 PDFJeank RivadeneyraNoch keine Bewertungen
- Fuente LG 42LS5700Dokument75 SeitenFuente LG 42LS5700Christyan LeonNoch keine Bewertungen
- MFL67289402 PDFDokument35 SeitenMFL67289402 PDFJeank RivadeneyraNoch keine Bewertungen
- CN220F NSDokument36 SeitenCN220F NSJeank RivadeneyraNoch keine Bewertungen
- IC TDA-11115, TDA-11145 Service Manual enDokument24 SeitenIC TDA-11115, TDA-11145 Service Manual enJeank Rivadeneyra50% (2)
- Kv-29fa750 Fa350 Bx-1lmanual de ServicioDokument134 SeitenKv-29fa750 Fa350 Bx-1lmanual de ServicioeliecerNoch keine Bewertungen
- Bdp5500 SmaDokument33 SeitenBdp5500 SmaJeank Rivadeneyra100% (1)
- LG 55uf950t LB52VDokument111 SeitenLG 55uf950t LB52VJeank RivadeneyraNoch keine Bewertungen
- Philips Chassis Lc8.1u-La SMDokument95 SeitenPhilips Chassis Lc8.1u-La SMbili_diskNoch keine Bewertungen
- Ic La 76931the Method To Enter The Factory Mode For Cpu 76931 From SzyDokument1 SeiteIc La 76931the Method To Enter The Factory Mode For Cpu 76931 From SzyJeank RivadeneyraNoch keine Bewertungen
- Philips 32PFL3605D LCD Esquema Fonte Tv32pfl3605dDokument2 SeitenPhilips 32PFL3605D LCD Esquema Fonte Tv32pfl3605dJeank RivadeneyraNoch keine Bewertungen
- 3yr-Astro-Properies of StarsDokument35 Seiten3yr-Astro-Properies of StarsBharath V YNoch keine Bewertungen
- Thermal Breakthrough Calculations To Optimize Design of Amultiple-Stage EGS 2015-10Dokument11 SeitenThermal Breakthrough Calculations To Optimize Design of Amultiple-Stage EGS 2015-10orso brunoNoch keine Bewertungen
- Module 1 Grade 8 (De Guzman)Dokument9 SeitenModule 1 Grade 8 (De Guzman)Kim De GuzmanNoch keine Bewertungen
- I C Engine LabDokument3 SeitenI C Engine LabDevNoch keine Bewertungen
- AlgebraDokument66 SeitenAlgebraOliseyenum Precious ChukuemekeNoch keine Bewertungen
- Edan M3B Vital Signs Monitor User ManualDokument92 SeitenEdan M3B Vital Signs Monitor User ManualJosé marino Franco AlzateNoch keine Bewertungen
- T 096Dokument3 SeitenT 096abelNoch keine Bewertungen
- DocuDokument77 SeitenDocuDon'tAsK TheStupidOnesNoch keine Bewertungen
- (Complete) Electrolysis of Copper SulphateDokument4 Seiten(Complete) Electrolysis of Copper SulphateNoooooNoch keine Bewertungen
- Famous MathematicianDokument116 SeitenFamous MathematicianAngelyn MontibolaNoch keine Bewertungen
- Anue 3500 Qrs - 0Dokument2 SeitenAnue 3500 Qrs - 0ullascsNoch keine Bewertungen
- K20 Engine Control Module X3 (Lt4) Document ID# 4739106Dokument3 SeitenK20 Engine Control Module X3 (Lt4) Document ID# 4739106Data TécnicaNoch keine Bewertungen
- 5ROS Underslung BSaverTROUGHS25Dokument1 Seite5ROS Underslung BSaverTROUGHS25jonodo89Noch keine Bewertungen
- Heat Fusion of Ice ReportDokument8 SeitenHeat Fusion of Ice Reporthasifah abdazizNoch keine Bewertungen
- Notes For Class 11 Maths Chapter 8 Binomial Theorem Download PDFDokument9 SeitenNotes For Class 11 Maths Chapter 8 Binomial Theorem Download PDFRahul ChauhanNoch keine Bewertungen
- Technical Data: Series Allclean AcnpDokument1 SeiteTechnical Data: Series Allclean AcnpBoško IvanovićNoch keine Bewertungen
- Unit Exam 5Dokument3 SeitenUnit Exam 5Rose AstoNoch keine Bewertungen
- 16620YDokument17 Seiten16620YbalajivangaruNoch keine Bewertungen
- PPF CalculatorDokument2 SeitenPPF CalculatorshashanamouliNoch keine Bewertungen
- Z Series: VZ-80 Series Portable Radio - VHF/UHFDokument2 SeitenZ Series: VZ-80 Series Portable Radio - VHF/UHFPrima SonyNoch keine Bewertungen
- The SphereDokument9 SeitenThe SpherePast Buanget100% (1)
- TrimLite™ UT20706 HomeliteDokument7 SeitenTrimLite™ UT20706 HomeliteBKVNoch keine Bewertungen
- 10 2Dokument26 Seiten10 2cristinatubleNoch keine Bewertungen