Das könnte Ihnen auch gefallen
- Estructuras Isostaticas Ii CablesDokument30 SeitenEstructuras Isostaticas Ii CablesAlejandro Flores CruzNoch keine Bewertungen
- Practica 1 de MecanicaDokument6 SeitenPractica 1 de MecanicaDiego Armando Zavaleta VasquezNoch keine Bewertungen
- Inf Granulometria UISDokument6 SeitenInf Granulometria UISomariozpNoch keine Bewertungen
- EdisonDokument2 SeitenEdisonEdison Enrique Hidalgo SilvaNoch keine Bewertungen
- Cuáles Son Las Fuentes de ErrorDokument2 SeitenCuáles Son Las Fuentes de ErrorDixon Antonio MaradiagaNoch keine Bewertungen
- Fuerzas Aplicadas A Una EstructuraDokument50 SeitenFuerzas Aplicadas A Una EstructuraSaul Percy Chircca PerezNoch keine Bewertungen
- Prob - Mec de MaterialesDokument4 SeitenProb - Mec de MaterialesArthur Dux100% (1)
- Problemas ING. BuitragoDokument4 SeitenProblemas ING. BuitragoJhonar LindarteNoch keine Bewertungen
- Laboratorio 1 Remt Tension Pura 1Dokument4 SeitenLaboratorio 1 Remt Tension Pura 1Santiago SalasNoch keine Bewertungen
- Impacto - Ejercicios de ClaseDokument6 SeitenImpacto - Ejercicios de ClaseRocio De La Hoz100% (1)
- Milenka Pinto BolivarDokument9 SeitenMilenka Pinto BolivarShady Pinto BolivarNoch keine Bewertungen
- Diseño Por FlexocompresiónDokument36 SeitenDiseño Por FlexocompresiónEdison QuillaNoch keine Bewertungen
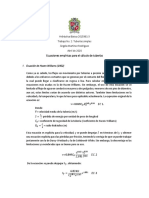
- Ecuaciones Empíricas para Tuberías ÁNGELA MARTÍNEZ HB-3 PDFDokument9 SeitenEcuaciones Empíricas para Tuberías ÁNGELA MARTÍNEZ HB-3 PDFAngela Martinez RodriguezNoch keine Bewertungen
- Peso Unitario - InformeDokument25 SeitenPeso Unitario - InformeKarlos AbantoNoch keine Bewertungen
- Ejercicios Semana 2-DeformaciónDokument4 SeitenEjercicios Semana 2-DeformaciónISA CBNoch keine Bewertungen
- Ejercicios de Tarea Flotabilidad y Fuerza Sobre Areas PlanasDokument22 SeitenEjercicios de Tarea Flotabilidad y Fuerza Sobre Areas PlanasMiluj RodriguezNoch keine Bewertungen
- Img 065Dokument1 SeiteImg 065Luis Jorge33% (3)
- Energía y Vector de PoyntingDokument3 SeitenEnergía y Vector de PoyntingRonald HouseNoch keine Bewertungen
- Doble IntegracionDokument14 SeitenDoble IntegracionBarce Dixon Perez100% (1)
- Solucion Tarea FluidosDokument18 SeitenSolucion Tarea FluidosSilenis RestrepoNoch keine Bewertungen
- EXP - Mecanica de Fluido (Martes)Dokument50 SeitenEXP - Mecanica de Fluido (Martes)YARVNoch keine Bewertungen
- LAB - 2 - Hidráulica de CanalesDokument28 SeitenLAB - 2 - Hidráulica de Canalesmoises elvisNoch keine Bewertungen
- Catalogo de Equipos de BombeoDokument6 SeitenCatalogo de Equipos de BombeoJohana CamposNoch keine Bewertungen
- TEMA 3 PANDEO EN BARRAS-parte 1Dokument17 SeitenTEMA 3 PANDEO EN BARRAS-parte 1Modesto Villca ValerianoNoch keine Bewertungen
- NTC 5215-Tubos de Concreto Reforzado para Alcantarillado Fabricados Segun Metodo de Disño DirectoDokument6 SeitenNTC 5215-Tubos de Concreto Reforzado para Alcantarillado Fabricados Segun Metodo de Disño Directojuan pablo HoyosNoch keine Bewertungen
- Maqueta de Vibraciones DinamicaDokument9 SeitenMaqueta de Vibraciones DinamicaYeltsin Huatangari Alarcon0% (1)
- Teoria Resis Casi TerminadoDokument16 SeitenTeoria Resis Casi Terminadolindabella123Noch keine Bewertungen
- ManningDokument13 SeitenManningMarlonGaitanOlivas100% (1)
- Ejercicio Carga AxialDokument9 SeitenEjercicio Carga AxialJhonatan PrietoNoch keine Bewertungen
- Cimientos POCO PROFUNDOS Y PLACAS DE CIMENTACION PDFDokument55 SeitenCimientos POCO PROFUNDOS Y PLACAS DE CIMENTACION PDFAleJo NavarroNoch keine Bewertungen
- Deformación Normal Bajo Carga AxialDokument9 SeitenDeformación Normal Bajo Carga AxialSaul Dos SantosNoch keine Bewertungen
- Informe #1 - Coeficientes DistribucionDokument12 SeitenInforme #1 - Coeficientes DistribucionAnonymous JpJUv5dtMRNoch keine Bewertungen
- DeformacionesDokument21 SeitenDeformacioneslesli fariasNoch keine Bewertungen
- Ejemplo Ayudantia Mecanica de SolidosDokument2 SeitenEjemplo Ayudantia Mecanica de SolidosPedro Alexander Gajardo PedrerosNoch keine Bewertungen
- Ejercicio 2. Precipitación MediaDokument4 SeitenEjercicio 2. Precipitación MediakevinNoch keine Bewertungen
- TALLER No. 1Dokument2 SeitenTALLER No. 1Jean HernándezNoch keine Bewertungen
- Capa Limite Con Gradiente de PresiónDokument6 SeitenCapa Limite Con Gradiente de Presiónitsmeagain0602Noch keine Bewertungen
- Procedimiento para Hallar El Punto de FluenciaDokument3 SeitenProcedimiento para Hallar El Punto de FluenciaJuan Camilo RobayoNoch keine Bewertungen
- Problemas Meca IDokument6 SeitenProblemas Meca ICesar Valentin Macias DíazNoch keine Bewertungen
- Estudio Del Flujo Gradualmente VariadoDokument7 SeitenEstudio Del Flujo Gradualmente Variadoczar100Noch keine Bewertungen
- Ejercicio RM G6Dokument3 SeitenEjercicio RM G6Mercy SalazarNoch keine Bewertungen
- Trabajo 2. Cables - Modo de CompatibilidadDokument2 SeitenTrabajo 2. Cables - Modo de CompatibilidadFrancisco David Medrano RiveraNoch keine Bewertungen
- C1 Mecanica de Materiales 1 2020-PautaDokument3 SeitenC1 Mecanica de Materiales 1 2020-PautaAlexis Maximiliano Montecinos BriceñosNoch keine Bewertungen
- Semana 5Dokument31 SeitenSemana 5JoseCopeloCNoch keine Bewertungen
- Mecánica de Solidos - TorsiónDokument60 SeitenMecánica de Solidos - TorsiónJohn JaraNoch keine Bewertungen
- Presentacion InduviasDokument19 SeitenPresentacion InduviasJulian VillarrealNoch keine Bewertungen
- Investigacion Tipos de Aligeramientos en OcañaDokument61 SeitenInvestigacion Tipos de Aligeramientos en OcañaJuanNoch keine Bewertungen
- P10 YungaDokument10 SeitenP10 YungaXavier YungaNoch keine Bewertungen
- Investigación CanalesDokument47 SeitenInvestigación CanalesSophia VásquezNoch keine Bewertungen
- Cargas Ciclicas 2021-2Dokument68 SeitenCargas Ciclicas 2021-2elkakon13Noch keine Bewertungen
- Tipos de Madera en TarijaDokument18 SeitenTipos de Madera en TarijaalexanderNoch keine Bewertungen
- Deflexion de VigasDokument16 SeitenDeflexion de VigasFRANK ENZO HUAYNATE CABEZASNoch keine Bewertungen
- Estructura Interna de Los MineralesDokument5 SeitenEstructura Interna de Los MineralesHeriibertooNoch keine Bewertungen
- EstaticaDokument3 SeitenEstaticaCristina QuinatoaNoch keine Bewertungen
- Perdidad Por Friccion - FluidosDokument15 SeitenPerdidad Por Friccion - FluidosMIGUEL ANGEL SUAREZ MONTOYANoch keine Bewertungen
- Trabajo 2Dokument2 SeitenTrabajo 2GA EynerNoch keine Bewertungen
- Act 1 MÉTODO DE CROSSDokument4 SeitenAct 1 MÉTODO DE CROSSluispdzp0% (1)
- Energia de Deformacion y Trabajo VirtualDokument57 SeitenEnergia de Deformacion y Trabajo VirtualCinthia ArevaloNoch keine Bewertungen
- Energia de Deformacion y Trabajo VirtualDokument43 SeitenEnergia de Deformacion y Trabajo Virtualfelipe pagan montesNoch keine Bewertungen
- Energ Deformacion Trabajo Virtual (2019)Dokument60 SeitenEnerg Deformacion Trabajo Virtual (2019)Mavel Ylatoma MelendezNoch keine Bewertungen
- Comercia Consulting Clasif Arancelaria y DrawbackDokument24 SeitenComercia Consulting Clasif Arancelaria y Drawbackolinda roman suarezNoch keine Bewertungen
- La SMV (Ex Conasev) Su Ley N°29782Dokument11 SeitenLa SMV (Ex Conasev) Su Ley N°29782Noelio Roman RomanNoch keine Bewertungen
- La SMVDokument13 SeitenLa SMVNoelio Roman RomanNoch keine Bewertungen
- La SMVDokument13 SeitenLa SMVNoelio Roman RomanNoch keine Bewertungen
- Tratado InternacionalDokument13 SeitenTratado InternacionalNoelio Roman RomanNoch keine Bewertungen
- La SMV (Ex Conasev) Su Ley N°29782Dokument11 SeitenLa SMV (Ex Conasev) Su Ley N°29782Noelio Roman RomanNoch keine Bewertungen
- Crisis y Realidad GlobalDokument12 SeitenCrisis y Realidad GlobalNoelio Roman RomanNoch keine Bewertungen
- Comercia Consulting Clasif Arancelaria y DrawbackDokument24 SeitenComercia Consulting Clasif Arancelaria y Drawbackolinda roman suarezNoch keine Bewertungen
- Gestion Empresarial y Micro FinancieraDokument9 SeitenGestion Empresarial y Micro FinancieraNoelio Roman RomanNoch keine Bewertungen
- Crisis y Realidad GlobalDokument12 SeitenCrisis y Realidad GlobalNoelio Roman RomanNoch keine Bewertungen
- Gestion Empresarial y Micro FinancieraDokument4 SeitenGestion Empresarial y Micro FinancieraNoelio Roman RomanNoch keine Bewertungen
- Pil LuanaDokument25 SeitenPil LuanaNoelio Roman RomanNoch keine Bewertungen
- Gestion Doumentaria de AduanasDokument12 SeitenGestion Doumentaria de AduanasNoelio Roman RomanNoch keine Bewertungen
- Reglamento Subastas SerializadasDokument6 SeitenReglamento Subastas SerializadasNoelio Roman RomanNoch keine Bewertungen
- Que Es Un ActivoDokument4 SeitenQue Es Un ActivoNoelio Roman RomanNoch keine Bewertungen
- Causas de La Mala AdministracionDokument19 SeitenCausas de La Mala AdministracionNoelio Roman RomanNoch keine Bewertungen
- Factores de Producción, Sistemas Económicos y AgentesDokument11 SeitenFactores de Producción, Sistemas Económicos y AgentesNoelio Roman RomanNoch keine Bewertungen
- Causas de La Mala AdministracionDokument19 SeitenCausas de La Mala AdministracionNoelio Roman RomanNoch keine Bewertungen
- Que Es Un ActivoDokument4 SeitenQue Es Un ActivoNoelio Roman RomanNoch keine Bewertungen
- El Mila y Su Importancia Actual Frente A La Alianza Del PacificoDokument3 SeitenEl Mila y Su Importancia Actual Frente A La Alianza Del PacificoNoelio Roman RomanNoch keine Bewertungen
- Estructura Del Sistema FinancieroDokument9 SeitenEstructura Del Sistema FinancieroNoelio Roman RomanNoch keine Bewertungen
- Estructura Del Sistema FinancieroDokument9 SeitenEstructura Del Sistema FinancieroNoelio Roman RomanNoch keine Bewertungen
- PórticosDokument27 SeitenPórticosNoelio Roman RomanNoch keine Bewertungen
- Estructura Del Sistema FinancieroDokument9 SeitenEstructura Del Sistema FinancieroNoelio Roman RomanNoch keine Bewertungen
- Estructura Del Sistema Financiero.Dokument14 SeitenEstructura Del Sistema Financiero.Noelio Roman RomanNoch keine Bewertungen
- La MaderaDokument11 SeitenLa MaderaNoelio Roman RomanNoch keine Bewertungen
- TIPOS DE ESTRUCCTURAS deDokument19 SeitenTIPOS DE ESTRUCCTURAS deNoelio Roman RomanNoch keine Bewertungen
- Casuistica Que Van en Contra de La Ingenieria CivilDokument4 SeitenCasuistica Que Van en Contra de La Ingenieria CivilNoelio Roman Roman100% (1)
- TIPOS DE ESTRUCCTURAS deDokument19 SeitenTIPOS DE ESTRUCCTURAS deNoelio Roman RomanNoch keine Bewertungen
- Informe de Deontologia SsDokument10 SeitenInforme de Deontologia SsNoelio Roman RomanNoch keine Bewertungen
- Ae Co z1m Ficha TecnicaDokument2 SeitenAe Co z1m Ficha Tecnicagatuso123Noch keine Bewertungen
- Logistica InversaDokument7 SeitenLogistica InversaJean Carlos HernandezNoch keine Bewertungen
- Vivir y Comer BienDokument175 SeitenVivir y Comer BienJoel VillaNoch keine Bewertungen
- Principales Ciudades de GuatemalaDokument6 SeitenPrincipales Ciudades de GuatemalaHarley Romeo Garcia MaczNoch keine Bewertungen
- Refractometría & PolarimetríaDokument17 SeitenRefractometría & PolarimetríaAlisonValera100% (1)
- Figuras LiterariasDokument16 SeitenFiguras LiterariasAdriana GarciaNoch keine Bewertungen
- AP 3 LECCIÓN 1 - Clase 2Dokument7 SeitenAP 3 LECCIÓN 1 - Clase 2Rafael FernandezNoch keine Bewertungen
- La GeotecniaDokument11 SeitenLa GeotecniaLeonorStephanyOvalleCorreaNoch keine Bewertungen
- HomeotermiaDokument5 SeitenHomeotermiaMARISELANoch keine Bewertungen
- Asis Yanapata FinalDokument97 SeitenAsis Yanapata FinalSanmary ZentenoNoch keine Bewertungen
- Alimentos FuncionalesDokument293 SeitenAlimentos FuncionalesKaren OrtegaNoch keine Bewertungen
- Clasificación Bioambiental de La República Argentina.: Iol'JaDokument21 SeitenClasificación Bioambiental de La República Argentina.: Iol'JaMaría PeraltaNoch keine Bewertungen
- Meza Calderón Erick BryanDokument122 SeitenMeza Calderón Erick BryanFernando SalazarNoch keine Bewertungen
- Capítulo 8 Momento LinealDokument6 SeitenCapítulo 8 Momento LinealMiguel MartinezNoch keine Bewertungen
- Carver Raymond AntologiaDokument168 SeitenCarver Raymond AntologiaGalloBatarazNoch keine Bewertungen
- Contaminacion Del AguaDokument5 SeitenContaminacion Del Agua1350 - MARIANA ELIZABETH MEDINA ESTUPIÑANNoch keine Bewertungen
- Modulo 1111Dokument13 SeitenModulo 1111damaris arias cletoNoch keine Bewertungen
- Torre LatinoamericanaDokument11 SeitenTorre Latinoamericanaalan leyvaNoch keine Bewertungen
- Educación EmocionalDokument120 SeitenEducación EmocionalSeguimiento VAENoch keine Bewertungen
- Ensayo Presupuesto de ProduccionDokument6 SeitenEnsayo Presupuesto de ProduccionDavid Felipe Lopez RodriguezNoch keine Bewertungen
- Historia de La Pintura (Una Historia de Amor Sobre Cupido)Dokument4 SeitenHistoria de La Pintura (Una Historia de Amor Sobre Cupido)vladimir alejandro camargo amadoNoch keine Bewertungen
- Ver21 Sep Med Fis7Dokument10 SeitenVer21 Sep Med Fis7Luis Miguel Livia GómezNoch keine Bewertungen
- UrbanismoDokument10 SeitenUrbanismoArules VereNoch keine Bewertungen
- Pasta para Muros Interior-Sipa-2017.Dokument2 SeitenPasta para Muros Interior-Sipa-2017.Christian Ulloa G.Noch keine Bewertungen
- Qué Son Las Enfermedades CardiovascularesDokument6 SeitenQué Son Las Enfermedades Cardiovascularesdanny rebolledoNoch keine Bewertungen
- Sesion de Aprendizaje 2019Dokument2 SeitenSesion de Aprendizaje 2019grocioquevedo riosNoch keine Bewertungen
- Kendall y KendallDokument3 SeitenKendall y KendallSilvana D'Agosto100% (1)
- Algebra IPNDokument11 SeitenAlgebra IPNBolivar Oramas100% (1)
- TF - Grupo 3 - MX81Dokument58 SeitenTF - Grupo 3 - MX81Angela CabreraNoch keine Bewertungen