Das könnte Ihnen auch gefallen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Towards A Theory of Volatility Trading: Cambridge Books Online © Cambridge University Press, 2010Dokument19 SeitenTowards A Theory of Volatility Trading: Cambridge Books Online © Cambridge University Press, 2010bobmezzNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- ING Think Rates Spark Shifting GroundsDokument6 SeitenING Think Rates Spark Shifting GroundsbobmezzNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- FX Talking: Some Stark DivergenceDokument15 SeitenFX Talking: Some Stark DivergencebobmezzNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- 1 IEOR 4701: Continuous-Time Markov ChainsDokument22 Seiten1 IEOR 4701: Continuous-Time Markov ChainsbobmezzNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Convexity Maven: "Building A Better Volatility Mousetrap"Dokument13 SeitenThe Convexity Maven: "Building A Better Volatility Mousetrap"bobmezzNoch keine Bewertungen
- Relative Value Analysis of SwaptionsDokument85 SeitenRelative Value Analysis of SwaptionsbobmezzNoch keine Bewertungen
- 1 Communication Classes and Irreducibility For Markov ChainsDokument8 Seiten1 Communication Classes and Irreducibility For Markov ChainsbobmezzNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Siegel ParadoxDokument4 SeitenSiegel ParadoxbobmezzNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Derivatives Across Asset ClassesDokument59 SeitenDerivatives Across Asset ClassesbobmezzNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- 1 Discrete-Time Markov ChainsDokument7 Seiten1 Discrete-Time Markov ChainsbobmezzNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Transelliptical Component Analysis: Johns Hopkins University Princeton UniversityDokument26 SeitenTranselliptical Component Analysis: Johns Hopkins University Princeton UniversitybobmezzNoch keine Bewertungen
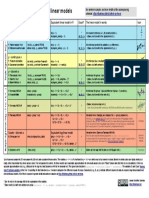
- Common Statistical Tests Are Linear ModelsDokument1 SeiteCommon Statistical Tests Are Linear ModelsbobmezzNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The 2013 Capital Requirements Directive IV and Capital Requirements Regulation: Implications and Institutional EffectsDokument49 SeitenThe 2013 Capital Requirements Directive IV and Capital Requirements Regulation: Implications and Institutional EffectsbobmezzNoch keine Bewertungen
- Berenberg Global ForecastsDokument15 SeitenBerenberg Global ForecastsbobmezzNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Measuring Cross Gamma Risk SSRNDokument16 SeitenMeasuring Cross Gamma Risk SSRNbobmezzNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Market Volatility BulletinDokument28 SeitenMarket Volatility BulletinbobmezzNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Global Cycle Notes Hope Springs EternalDokument27 SeitenGlobal Cycle Notes Hope Springs EternalbobmezzNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Effect of Correlation On Bond Prices in Short RateDokument13 SeitenEffect of Correlation On Bond Prices in Short RatebobmezzNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- GS Inflation Implementation 10-20Dokument20 SeitenGS Inflation Implementation 10-20bobmezzNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Dynamical Functional Equations PDFDokument2 SeitenDynamical Functional Equations PDFbobmezzNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- DB - Fed Notes Mar 20Dokument12 SeitenDB - Fed Notes Mar 20bobmezzNoch keine Bewertungen
- Numerical Methods For Hamilton-Jacobi-Bellman EquationsDokument68 SeitenNumerical Methods For Hamilton-Jacobi-Bellman EquationsbobmezzNoch keine Bewertungen
- An Application of The Calculus of Variations To Sturm Liouville TheoryDokument13 SeitenAn Application of The Calculus of Variations To Sturm Liouville TheorybobmezzNoch keine Bewertungen
- Solution Manual For Investment Science by David LuenbergerDokument94 SeitenSolution Manual For Investment Science by David Luenbergerkoenajax96% (28)
- A Report On Traffic Volume StudyDokument33 SeitenA Report On Traffic Volume StudyManoj Durairaj100% (1)
- Best Approach: Compound AngleDokument8 SeitenBest Approach: Compound AngleAbhiyanshu KumarNoch keine Bewertungen
- 3AP1 DTC en - V9 - Epost PDFDokument8 Seiten3AP1 DTC en - V9 - Epost PDFjoan75Noch keine Bewertungen
- Pelod Vs Sofa Scoring in PediatricDokument6 SeitenPelod Vs Sofa Scoring in PediatricAdrian KhomanNoch keine Bewertungen
- Essay 1 Weight and BalanceDokument4 SeitenEssay 1 Weight and BalanceHamdan Merchant83% (6)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Ugc Model Curriculum Statistics: Submitted To The University Grants Commission in April 2001Dokument101 SeitenUgc Model Curriculum Statistics: Submitted To The University Grants Commission in April 2001Alok ThakkarNoch keine Bewertungen
- Hazardous Area ClassificationDokument36 SeitenHazardous Area Classificationvenkeeku100% (1)
- InfoDokument18 SeitenInfoKaran Verm'aNoch keine Bewertungen
- Switching Power Supply DesignDokument21 SeitenSwitching Power Supply DesignSamuel mutindaNoch keine Bewertungen
- Number Patterns and SequencesDokument10 SeitenNumber Patterns and SequencesMohamed Hawash80% (5)
- Sti260N6F6 Stp260N6F6: N-Channel 60 V, 0.0024 Ω, 120 A Stripfet™ Vi Deepgate™ Power Mosfet In To-220 And I²Pak PackagesDokument14 SeitenSti260N6F6 Stp260N6F6: N-Channel 60 V, 0.0024 Ω, 120 A Stripfet™ Vi Deepgate™ Power Mosfet In To-220 And I²Pak PackagesRyn YahuFNoch keine Bewertungen
- EC SyllDokument4 SeitenEC SyllDDIYNoch keine Bewertungen
- Commissioning PFDC DriveDokument45 SeitenCommissioning PFDC DriveFonoaudióloga Gisele RezendeNoch keine Bewertungen
- Excel Formulas and Functions 2021-The Intermediate Level Step byDokument122 SeitenExcel Formulas and Functions 2021-The Intermediate Level Step bymaolegu100% (3)
- 23AE23 DS enDokument4 Seiten23AE23 DS enBhageerathi SahuNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Triosonate in F (TWV 42-F7)Dokument17 SeitenTriosonate in F (TWV 42-F7)EDMILSON BRUNO DO NASCIMENTONoch keine Bewertungen
- API ISCAN-LITE ScannerDokument4 SeitenAPI ISCAN-LITE Scannergrg_greNoch keine Bewertungen
- Ra 6938Dokument2 SeitenRa 6938GaryNoch keine Bewertungen
- Zbrush 4 ShortcutsDokument3 SeitenZbrush 4 ShortcutsJNoch keine Bewertungen
- Strain STREMADokument6 SeitenStrain STREMAChavin StormNoch keine Bewertungen
- 09.0 Product Description - MAN EcoTorqueDokument2 Seiten09.0 Product Description - MAN EcoTorquegoginemNoch keine Bewertungen
- 15Dokument20 Seiten15Allen Rey YeclaNoch keine Bewertungen
- PPT5. SeptIITK - Crystal - Imperfections - DislocationsDokument92 SeitenPPT5. SeptIITK - Crystal - Imperfections - DislocationsKartik Shankar KumbhareNoch keine Bewertungen
- V1 N2 1980 RabenhorstDokument6 SeitenV1 N2 1980 Rabenhorstraa2010Noch keine Bewertungen
- DelhiDokument44 SeitenDelhiIndia TreadingNoch keine Bewertungen
- BS en 00405-2001 + A1-2009 PDFDokument48 SeitenBS en 00405-2001 + A1-2009 PDFShan Sandaruwan AbeywardeneNoch keine Bewertungen
- CISCO Router Software - Configuration PDFDokument408 SeitenCISCO Router Software - Configuration PDFasalihovicNoch keine Bewertungen
- Arithmetic Unit: Dr. Sowmya BJDokument146 SeitenArithmetic Unit: Dr. Sowmya BJtinni09112003Noch keine Bewertungen
- Optical Properties of Gem Substances Educational Objective: This Exercise, Unit 7 in The Above Syllabus, Will Introduce Students To Skills andDokument19 SeitenOptical Properties of Gem Substances Educational Objective: This Exercise, Unit 7 in The Above Syllabus, Will Introduce Students To Skills andCarl SoriaNoch keine Bewertungen